一直想基于传统图像匹配方式做一个融合Demo,也算是对上个阶段学习的一个总结。
由此,便采购了一个摄像头,在此基础上做了实时检测平面目标的特征匹配算法。
代码如下:
# coding: utf-8
'''
@author: linxu
@contact: 17746071609@163.com
@time: 2021-07-26 上午11:54
@desc: 基于特征匹配的实时平面目标检测算法
@Ref: https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_feature_homography/py_feature_homography.htm
'''
import numpy as np
import cv2
class ObjectDetector:
""" 基于特征匹配的实时平面目标检测算法 """
def __init__(self):
# 特征点检测-选择不同的特征描述子
self.feature_detector = cv2.AKAZE_create() # Use AKAZE
# self.feature_detector = cv2.ORB_create() # Use ORB
# self.feature_detector = cv2.KAZE_create()# Use KAZE
# self.feature_detector = cv2.SIFT_create()# Use SIFT
# self.feature_detector = cv2.BRISK_create()# Use BRISK
# 摄像头相机参数设置VideoCapture
self.vidcap = cv2.VideoCapture(0)
self.vidcap.set(3, 640) # 宽度
self.vidcap.set(4, 480) # 高度
self.vidcap.set(5, 15) # 帧率
# 通过ROI(感兴趣区域)来注册目标对象
self.sub_topleft = [100, 220] # [0, 0] # [y,x]100 220
self.sub_width = 200 #640 200
self.sub_height = 200 #480 200
self.sub_bottomright = [self.sub_topleft[0] + self.sub_height - 1,
self.sub_topleft[1] + self.sub_width - 1]
# rect矩形框体
self.rect_color = (0, 255, 0) # green
self.rect_thickness = 3
self.rect_tl_outer_xy = (self.sub_topleft[1] - self.rect_thickness, self.sub_topleft[0] - self.rect_thickness)
self.rect_br_outer_xy = (self.sub_bottomright[1] + self.rect_thickness, self.sub_bottomright[0] + self.rect_thickness)
# 特征(描述符)向量距离的阈值
self.ratio = 0.75
self.registered = False
self.min_match_count = 5
self.show_rectangle = True
def register(self):
"""注册目标对象"""
print("
将目标物体靠近相机.")
print("确保对象完全覆盖矩形内部(背景不可见).")
print("然后,按“r”注册对象.
")
while self.vidcap.isOpened():
ret, frame = self.vidcap.read()
cv2.rectangle(frame, self.rect_tl_outer_xy, self.rect_br_outer_xy,
self.rect_color, self.rect_thickness)
cv2.imshow("Registration (press 'r' to register)", frame)
if cv2.waitKey(1) & 0xFF == ord('r'):
# 图像切片
subimg = frame[self.sub_topleft[0]:(self.sub_topleft[0] + self.sub_height),
self.sub_topleft[1]:(self.sub_topleft[1] + self.sub_width)]
self.kp0, self.des0 = self.feature_detector.detectAndCompute(subimg, None)
self.queryimg = subimg
self.registered = True
break
def detect(self):
""" 使用特征点查找对象 """
global mask
if not self.registered:
print("Call 'register()' first.")
return
print("Start detection...")
print("按“q”退出.")
print("按“h”隐藏绿色矩形.
")
# 声明一个暴力匹配器Blute-Force (BF) matcher
bf = cv2.BFMatcher()
while self.vidcap.isOpened():
ret, frame = self.vidcap.read()
# 关键点(kp)检测和计算描述符(des)
kp, des = self.feature_detector.detectAndCompute(frame, None)
# 在关键点之间应用knn匹配
matches = bf.knnMatch(self.des0, des, k=2)
# 根据阈值筛选关键特征点
# good = [[m] for m, n in matches if m.distance < self.ratio * n.distance]
good = []
for m, n in matches:
if m.distance < self.ratio * n.distance:
good.append([m])
print('len',len(good))
contours = []
# 查找单应性矩阵
if (len(good) > self.min_match_count) and self.show_rectangle:
# 建立坐标矩阵
src_pts = np.float32([self.kp0[m[0].queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp[m[0].trainIdx].pt for m in good]).reshape(-1, 1, 2)
# 计算多个二维点对之间的最优单映射变换矩阵 H
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
# Assume color camera
# cv2.imshow('queryimg',self.queryimg)
h, w, c = self.queryimg.shape
pts = np.float32([[0, 0], [0, h-1], [w-1, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv2.perspectiveTransform(pts, M)
# cv2.circle(frame,tuple(dst_pts[0][0]),5, (255,0,0))
# cv2.circle(frame, tuple(dst_pts[1][0]), 5, (0, 255, 0))
# cv2.circle(frame, tuple(dst_pts[2][0]), 5, (0, 0, 255))
# cv2.circle(frame, tuple(dst_pts[3][0]), 5, (255, 255, 0))
# cv2.imshow('circle', frame)
frame = cv2.polylines(frame, [np.int32(dst)], True, (0, 255, 0), 2, cv2.LINE_AA)
# 可视化匹配过程
# 绘画参数
# draw_params = dict(flags=2)
draw_params = dict(matchColor=(0, 255, 0), singlePointColor=(0, 0, 255),flags=0)
img = cv2.drawMatchesKnn(self.queryimg, self.kp0, frame, kp, good, None, **draw_params)
cv2.imshow("Detection (press 'q' to quit)", img)
key_pressed = cv2.waitKey(1)
if key_pressed & 0xFF == ord('q'):
break
if key_pressed & 0xFF == ord('h'):
self.show_rectangle = False
def close(self):
""" 释放VideoCapture并销毁windows """
self.vidcap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
obj_detector = ObjectDetector()
obj_detector.register()
obj_detector.detect()
obj_detector.close()
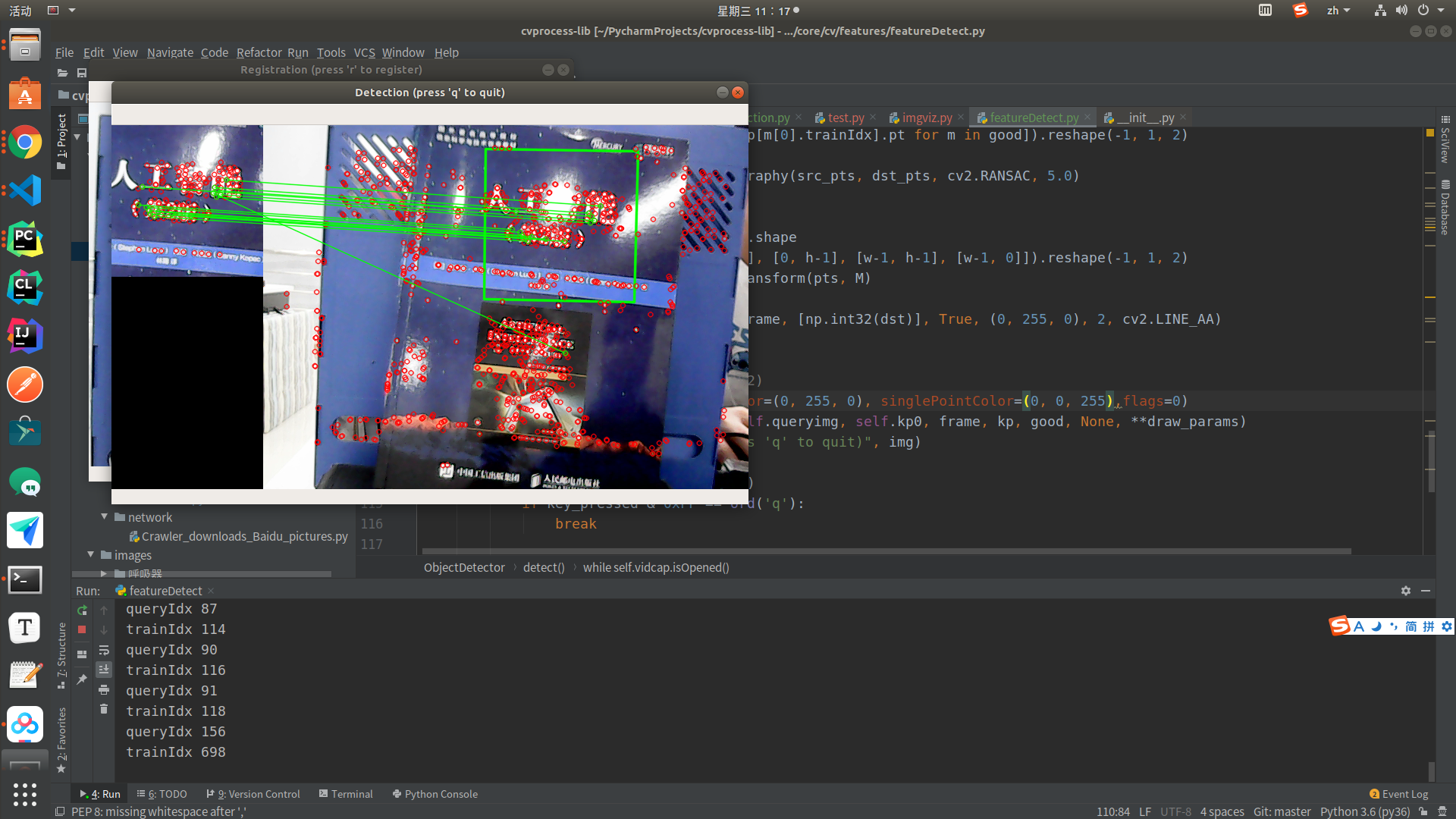
测试效果,如下: