一、ORB-SLAM简介
最近开始入坑SLAM,经过简单调研,各位大咖认为,目前最优秀的视觉SLAM系统是ORB-SLAM2,因此对ORB-SLAM2进行了学习。
ORB-SLAM2是2015年提出的支持单目、双目、RGB-D相机三种工作模式的SLAM系统。整个系统基于ORB特征实现,包含了跟踪定位、局部地图构建、回环检测三个主线程。通常认为ORB-SLAM是基于PTAM的而进一步发展的,包含了目前流行SLAM系统的主要模块。整个系统在PC端运行帧率可达30帧,由于使用了自动初始化、重定位、回环检测等,具备较好的鲁棒性和准确性。官网网址为:http://webdiis.unizar.es/~raulmur/orbslam/。
二、ORB-SLAM三线程分析
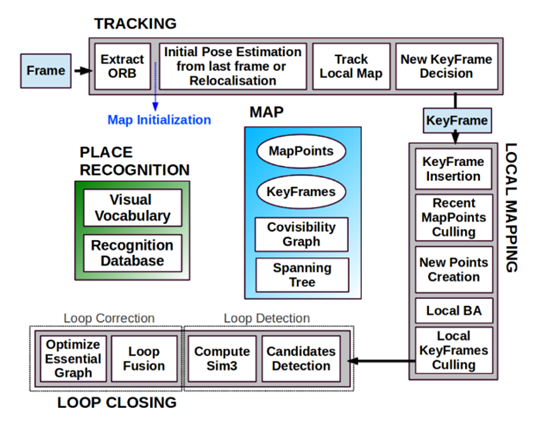
如上图所示,三线程为Tracking、LocalMapping、LoopClosing。
(1)跟踪模块:主要是通过提取每一帧的ORB特征,通过恒速模型、关键帧模型、重定位估计相机初始位姿,然后通过共视关系跟踪局部局部地图来优化相机位姿进行优化,最后确定当前帧是否作为关键帧插入地图中。
(2)局部建图:主要是针对跟踪过程中产生的关键帧进行操作,包括把该关键帧插入到地图中,添加新的地图点,剔除冗余的关键帧、地图点,通过Local BA优化相机位姿和地图点。
(3)回环检测:同样针对关键帧进行操作,主要是通过BoW模型判断当前关键帧是否产生回环,如果产生可能的回环则进行回环一致性检测,通过一致性检测之后认为运动已经产生回环,则计算Sim3变换进行回环矫正,并另起线程进行全局优化。
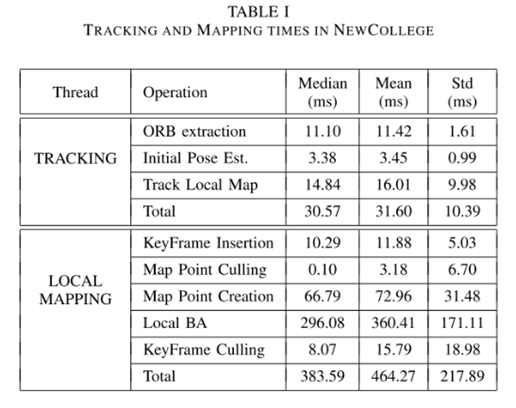
其中跟踪模块需要处理摄像头获取的每一帧图像,从而实时估计相机位姿,而局部建图和回环检测通常只针对关键帧进行操作,因此不需要实时运行。下面贴了作者测试的时间分布情况:
学习ORB-SLAM2过程中参考了很多大咖的博客(都是可以百度出来的):
http://blog.csdn.net/u010128736/article/details/53157605
http://www.cnblogs.com/gaoxiang12/p/5161223.html
。。。。
安装配置的过程网上的教程已经很多了,这里就不在赘述了。上面这些都是网上现成的,后面将给出自己学习过程中理解的具体细节。