operating principles 工作原理
Velodyne 加州,Hokuyo 日本,SICK 德国
TOF 就是用发出去收到的时间差和光速算距离
basic LIDAR models (2D, 3D)
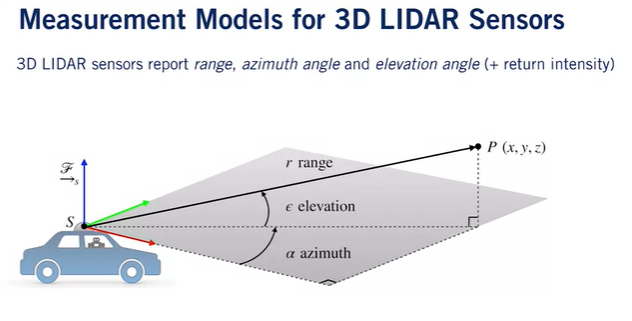
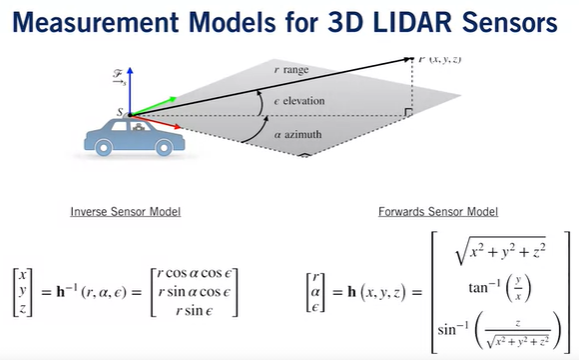
球面坐标系和笛卡尔直角坐标系的转化:
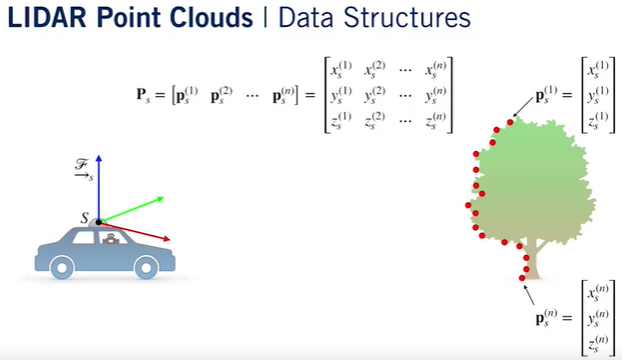
cloud point 点云
1. 点云数据结构
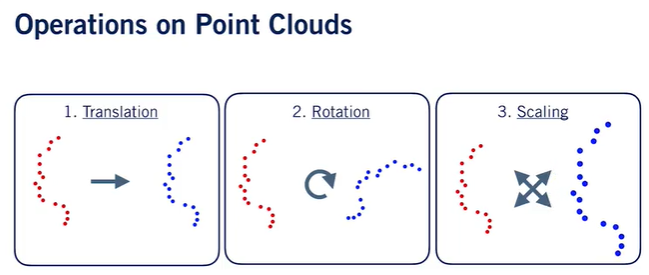
2. 点云空间操作
translation, rotation, scaling, plane-fitting (主要用来识别路面,拿点云来拟合路面的平面,用最小二乘法)
localization via point cloud registration
pose estimation via point cloud data - 也就是解决 cloud set registration problem
1. 什么是 cloud set registration problem? 怎样用来做state estimation?
2. Iterative Closest Point (ICP) algo
在图像领域,有特征匹配算法来匹配对应点,针对点云可以用ICP算法。基本思想就是用两次点云数据的变化来推出motion是怎么变化的, 但是对移动物体来说可能造成激光的测距不变(同样速度下),这样就误认为是静止的. 这个问题可以通过 Robust cost function 来减弱影响,也可以通过和GPS sersor 信息做 sersor fusing.
ICP有两种 Point-to-Point ICP, 和 Point-to-Plain ICP