Envoy 源码分析--event
申明:本文的 Envoy 源码分析基于 Envoy1.10.0。
Envoy 的事件是复用了 libevent 的 event_base 。其在代码中的表现就是类 Dispatcher,一个 Dispatcher 其实就是一个 event_loop,主要的核心功能有:网络事件处理,定时器,信号处理,任务队列,代码对象的析构等。下面是相关的类图。
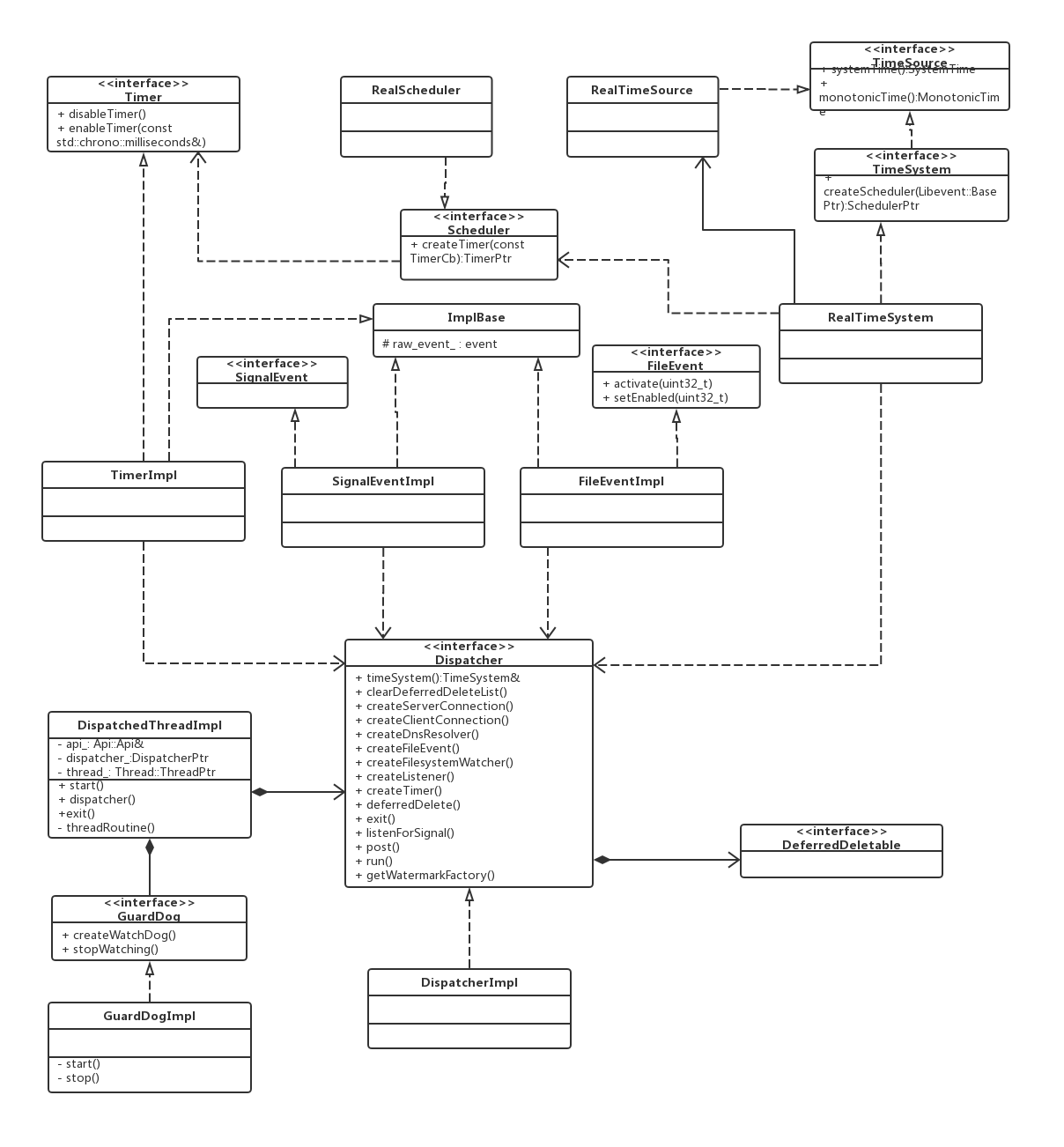
ImplBase 包含了 libevent 的事件类型,对象在析构时会自动调用 event_del。 ImplBase 派生出 FileEventImpl、 SignalEventImpl 和 TimerImpl 三种类型的事件。 RealTimeSystem 在创建调度后,会创建一个线程局部存储(TLS)的时间队列。DispatchedThreadImpl 包含了 DispatcherImpl 在启动时会创建一条线程,然后启动一个 event_loop,同时在 event_loop 外层包了个 guard_dog 防止死锁。
libevent
Envoy 是 C++ 的,而 libevent 是个 C 库,这就需要自动管理 C 结构的内存。 Envoy 通过继承智能指针 unique_ptr 来重新封装了 libevent 的结构体。
template <class T, void (*deleter)(T*)> class CSmartPtr : public std::unique_ptr<T, void (*)(T*)> {
public:
CSmartPtr() : std::unique_ptr<T, void (*)(T*)>(nullptr, deleter) {}
CSmartPtr(T* object) : std::unique_ptr<T, void (*)(T*)>(object, deleter) {}
};
然后使用 CSmartPtr 就可以自动管理 libevent 的结构体。使用方式如下:
struct event_base;
extern "C" {
void event_base_free(event_base*);
}
struct evbuffer;
extern "C" {
void evbuffer_free(evbuffer*);
}
struct bufferevent;
extern "C" {
void bufferevent_free(bufferevent*);
}
struct evconnlistener;
extern "C" {
void evconnlistener_free(evconnlistener*);
}
typedef CSmartPtr<event_base, event_base_free> BasePtr;
typedef CSmartPtr<evbuffer, evbuffer_free> BufferPtr;
typedef CSmartPtr<bufferevent, bufferevent_free> BufferEventPtr;
typedef CSmartPtr<evconnlistener, evconnlistener_free> ListenerPtr;
这样 libevent 的结构体就变成了 C++ 的智能指针。
Envoy 有三种事件都是 event 类型,我们需要对事件类型进行抽象,自动管理事件的释放。Envoy 将 event 作为 ImplBase的成员,在类析构进自动释放,所有事件只要继承 ImplBase 就完成了事件的自动管理。
class ImplBase {
protected:
~ImplBase();
event raw_event_;
};
ImplBase::~ImplBase() {
event_del(&raw_event_);
}
Timer
Timer 只有两接口一个用于启动,另一个用于关闭。
class Timer {
public:
virtual ~Timer() {}
virtual void disableTimer() PURE;
virtual void enableTimer(const std::chrono::milliseconds& d) PURE;
};
创建 Timer 时,会在构造函数内进行初始化。enableTimer 时调用 event_add 加入事件。 disableTimer 时调用 event_del 删除事件。
TimerImpl::TimerImpl(Libevent::BasePtr& libevent, TimerCb cb) : cb_(cb) {
ASSERT(cb_);
evtimer_assign(
&raw_event_, libevent.get(),
[](evutil_socket_t, short, void* arg) -> void { static_cast<TimerImpl*>(arg)->cb_(); }, this);
}
void TimerImpl::disableTimer() { event_del(&raw_event_); }
void TimerImpl::enableTimer(const std::chrono::milliseconds& d) {
if (d.count() == 0) {
event_active(&raw_event_, EV_TIMEOUT, 0);
} else {
// TODO(#4332): use duration_cast more nicely to clean up this code.
std::chrono::microseconds us = std::chrono::duration_cast<std::chrono::microseconds>(d);
timeval tv;
tv.tv_sec = us.count() / 1000000;
tv.tv_usec = us.count() % 1000000;
event_add(&raw_event_, &tv);
}
}
SignalEvent
SignalEvent 比较简单在构造函数时,直接初始化并加入事件。
SignalEventImpl::SignalEventImpl(DispatcherImpl& dispatcher, int signal_num, SignalCb cb)
: cb_(cb) {
evsignal_assign(
&raw_event_, &dispatcher.base(), signal_num,
[](evutil_socket_t, short, void* arg) -> void { static_cast<SignalEventImpl*>(arg)->cb_(); },
this);
evsignal_add(&raw_event_, nullptr);
}
FileEvent
文件相关的事件封装为 FileEvent。我们知道 linux 中 socket 也是一个文件,因此 socket 套接字相关的事件也属于 FileEvent。FileEvent 使用持久性事件假定用户一直读或写,直到收到 EAGAIN。
FileEvent 提供两个接口。activate 无论事件是否准备就绪,此方法都会主动触发事件,典型场景:socket 读写事件, EventLoop 唤醒等。setEnabled 用于设置事件。
class FileEvent {
public:
virtual ~FileEvent() {}
virtual void activate(uint32_t events) PURE;
virtual void setEnabled(uint32_t events) PURE;
};
RealTimeSystem
RealTimeSystem 暴露三个接口。
class RealTimeSystem : public TimeSystem {
public:
SchedulerPtr createScheduler(Libevent::BasePtr&) override;
SystemTime systemTime() override { return time_source_.systemTime(); }
MonotonicTime monotonicTime() override { return time_source_.monotonicTime(); }
private:
RealTimeSource time_source_;
}
systemTime返回系统时间。调用的是 std::chrono 的 system_clock。monotonicTime返回的是系统的启动时间。即 linux 命令uptime上的启动时间。用于时间间隔,不会受系统修改时间的影响。调用的是 std::chrono 的 steady_clock。createScheduler创建一个计时器工厂(factory模式)。间接启用线程本地计时器队列管理,因此每个线程具有单独的计时器。RealScheduler类放在源文件中,外部无法调用。
//创建计时器工厂
SchedulerPtr RealTimeSystem::createScheduler(Libevent::BasePtr& libevent) {
return std::make_unique<RealScheduler>(libevent);
}
class RealScheduler : public Scheduler {
public:
RealScheduler(Libevent::BasePtr& libevent) : libevent_(libevent) {}
//创建一个本地计时器
TimerPtr createTimer(const TimerCb& cb) override {
return std::make_unique<TimerImpl>(libevent_, cb);
};
private:
Libevent::BasePtr& libevent_;
};
任务队列
Dispatcher 内部创建了一个任务队列,将所有的 callback 加入队列。同时创建一个 Timer 调用一个函数,函数内循环处理。
post 方法将传进来的 callback 加入到任务任务。如果加入前的队列为空就需要触发定时器。post_timer_ 在构造函数内已设置好其对应的函数,调用 runPostCallbacks。
void DispatcherImpl::post(std::function<void()> callback) {
bool do_post;
{
Thread::LockGuard lock(post_lock_);
do_post = post_callbacks_.empty();
post_callbacks_.push_back(callback);
}
if (do_post) {
post_timer_->enableTimer(std::chrono::milliseconds(0));
}
}
DispatcherImpl::DispatcherImpl(TimeSystem& time_system, Buffer::WatermarkFactoryPtr&& factory,
Api::Api& api)
: ...
post_timer_(createTimer([this]() -> void { runPostCallbacks(); })),
current_to_delete_(&to_delete_1_) {
RELEASE_ASSERT(Libevent::Global::initialized(), "");
}
runPostCallbacks 是一个死循环,每次取一个 callback 进行处理。直到队列为空跳出循环。从这可以看出 post 进来的任务,如果在加入前队列为空的话,runPostCallbacks 已退出,因此需要重新触发 post_timer_。
void DispatcherImpl::runPostCallbacks() {
while (true) {
std::function<void()> callback;
{
Thread::LockGuard lock(post_lock_);
if (post_callbacks_.empty()) {
return;
}
callback = post_callbacks_.front();
post_callbacks_.pop_front();
}
callback();
}
}
延迟析构
延迟析构指的是将 unique_ptr 的对象的析构的动作交由 Dispatcher 来完成。 DeferredDeletable 是个空接口,所有析构的对象都要继承 DeferredDeletable。
class DeferredDeletable {
public:
virtual ~DeferredDeletable() {}
};
typedef std::unique_ptr<DeferredDeletable> DeferredDeletablePtr;
Dispatcher 对象保存了所有要延迟析构的对象
std::vector<DeferredDeletablePtr> to_delete_1_;
std::vector<DeferredDeletablePtr> to_delete_2_;
std::vector<DeferredDeletablePtr>* current_to_delete_;
to_delete_1_ 和 to_delete_2 保存了析构的对象,current_to_delete_ 指针当前要析构的对象。加入延迟析构对象时,如果当前的析构对象长度为 1,deferred_delete_timer_ 就会被触发。
void DispatcherImpl::deferredDelete(DeferredDeletablePtr&& to_delete) {
ASSERT(isThreadSafe());
current_to_delete_->emplace_back(std::move(to_delete));
ENVOY_LOG(trace, "item added to deferred deletion list (size={})", current_to_delete_->size());
if (1 == current_to_delete_->size()) {
deferred_delete_timer_->enableTimer(std::chrono::milliseconds(0));
}
}
deferred_delete_timer_ 是在构造函数内已构造好回调函数 clearDeferredDeleteList。clearDeferredDeleteList 中 current_to_delete_始终指向当前正要析构的对象列表,每次执行完析构后就指向另外一个对象列表,来回交替。
void DispatcherImpl::clearDeferredDeleteList() {
ASSERT(isThreadSafe());
std::vector<DeferredDeletablePtr>* to_delete = current_to_delete_;
size_t num_to_delete = to_delete->size();
if (deferred_deleting_ || !num_to_delete) {
return;
}
ENVOY_LOG(trace, "clearing deferred deletion list (size={})", num_to_delete);
if (current_to_delete_ == &to_delete_1_) {
current_to_delete_ = &to_delete_2_;
} else {
current_to_delete_ = &to_delete_1_;
}
deferred_deleting_ = true;
for (size_t i = 0; i < num_to_delete; i++) {
(*to_delete)[i].reset();
}
to_delete->clear();
deferred_deleting_ = false;
}
可以看出延迟析构的原理和任务队列原理差不多。
为何要延迟析构以及析构时为何需要两个队列,可参考:https://yq.aliyun.com/articles/659277
dispacth_thread
dispacth_thread 只是一个简单的 event_loop 线程,不支持像接收新连接那样的工作线程。 接口很简单,在启动时,启动一个新线程,在新线程中调用 dispatch run 执行 event_loop。同时会新建一个 GuardDog 监控线程是否死锁。
void DispatchedThreadImpl::start(Server::GuardDog& guard_dog) {
thread_ =
api_.threadFactory().createThread([this, &guard_dog]() -> void { threadRoutine(guard_dog); });
}
void DispatchedThreadImpl::threadRoutine(Server::GuardDog& guard_dog) {
ENVOY_LOG(debug, "dispatched thread entering dispatch loop");
auto watchdog = guard_dog.createWatchDog(api_.threadFactory().currentThreadId());
watchdog->startWatchdog(*dispatcher_);
dispatcher_->run(Dispatcher::RunType::Block);
ENVOY_LOG(debug, "dispatched thread exited dispatch loop");
guard_dog.stopWatching(watchdog);
watchdog.reset();
dispatcher_.reset();
}