首先安装好kinect2的驱动https://github.com/code-iai/iai_kinect2
并标定好,标定的样本图片越多越好
在工作空间git clone https://github.com/raulmur/ORB_SLAM2
cd catkin_ws/src/ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh
编译中我遇到的错误前边博客以列出
还需修改
~/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc
其中话题名修改如下
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/kinect2/qhd/image_color_rect", 1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/kinect2/qhd/image_depth_rect", 1);
需要重新编译./build_ros.sh
还需将仿照TUM1.yaml的格式编写kinect2_qhd.yaml提供所需参数
%YAML:1.0 #-------------------------------------------------------------------------------------------- # Camera Parameters. Adjust them! #-------------------------------------------------------------------------------------------- # Camera calibration and distortion parameters (OpenCV) Camera.fx: 501.3 Camera.fy: 499.8 Camera.cx: 479.7 Camera.cy: 236.0 Camera.k1: 0.00643 Camera.k2: 0.0150 Camera.p1: 0.00944 Camera.p2: 0.00212 Camera.p3: 0.0267 # 以上参数为calib_color.yaml中所得 Camera. 960 Camera.height: 540 # Camera frames per second Camera.fps: 30.0 # IR projector baseline times fx (aprox.) Camera.bf: 40.0 # Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale) Camera.RGB: 1 # Close/Far threshold. Baseline times. ThDepth: 50.0 # Deptmap values factor DepthMapFactor: 1000.0 #-------------------------------------------------------------------------------------------- # ORB Parameters #-------------------------------------------------------------------------------------------- # ORB Extractor: Number of features per image ORBextractor.nFeatures: 1000 # ORB Extractor: Scale factor between levels in the scale pyramid ORBextractor.scaleFactor: 1.2 # ORB Extractor: Number of levels in the scale pyramid ORBextractor.nLevels: 8 # ORB Extractor: Fast threshold # Image is divided in a grid. At each cell FAST are extracted imposing a minimum response. # Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST # You can lower these values if your images have low contrast ORBextractor.iniThFAST: 20 ORBextractor.minThFAST: 7 #-------------------------------------------------------------------------------------------- # Viewer Parameters #-------------------------------------------------------------------------------------------- Viewer.KeyFrameSize: 0.05 Viewer.KeyFrameLineWidth: 1 Viewer.GraphLineWidth: 0.9 Viewer.PointSize:2 Viewer.CameraSize: 0.08 Viewer.CameraLineWidth: 3 Viewer.ViewpointX: 0 Viewer.ViewpointY: -0.7 Viewer.ViewpointZ: -1.8 Viewer.ViewpointF: 500
calib_color.yaml
%YAML:1.0 --- cameraMatrix: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 1.0026733709141176e+03, 0., 9.5955552780476421e+02, 0., 9.9937595642637643e+02, 4.7210512130052348e+02, 0., 0., 1. ] distortionCoefficients: !!opencv-matrix rows: 1 cols: 5 dt: d data: [ 6.4315074878269415e-03, -1.4985055702513178e-02, -9.4388254621764183e-03, 2.1259459646973751e-03, -2.6684108335689218e-02 ] rotation: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 1., 0., 0., 0., 1., 0., 0., 0., 1. ] projection: !!opencv-matrix rows: 4 cols: 4 dt: d data: [ 1.0026733709141176e+03, 0., 9.5955552780476421e+02, 0., 0., 9.9937595642637643e+02, 4.7210512130052348e+02, 0., 0., 0., 1., 0., 0., 0., 0., 1. ]
运行
rosrun kinect2_bridge kinect2_bridge _depth_method:=cpu _reg_method:=cpu
rosrun ORB_SLAM2 RGBD /home/miao/catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/miao/catkin_ws/src/ORB_SLAM2/Examples/RGB-D/kinect2_qhd.yaml
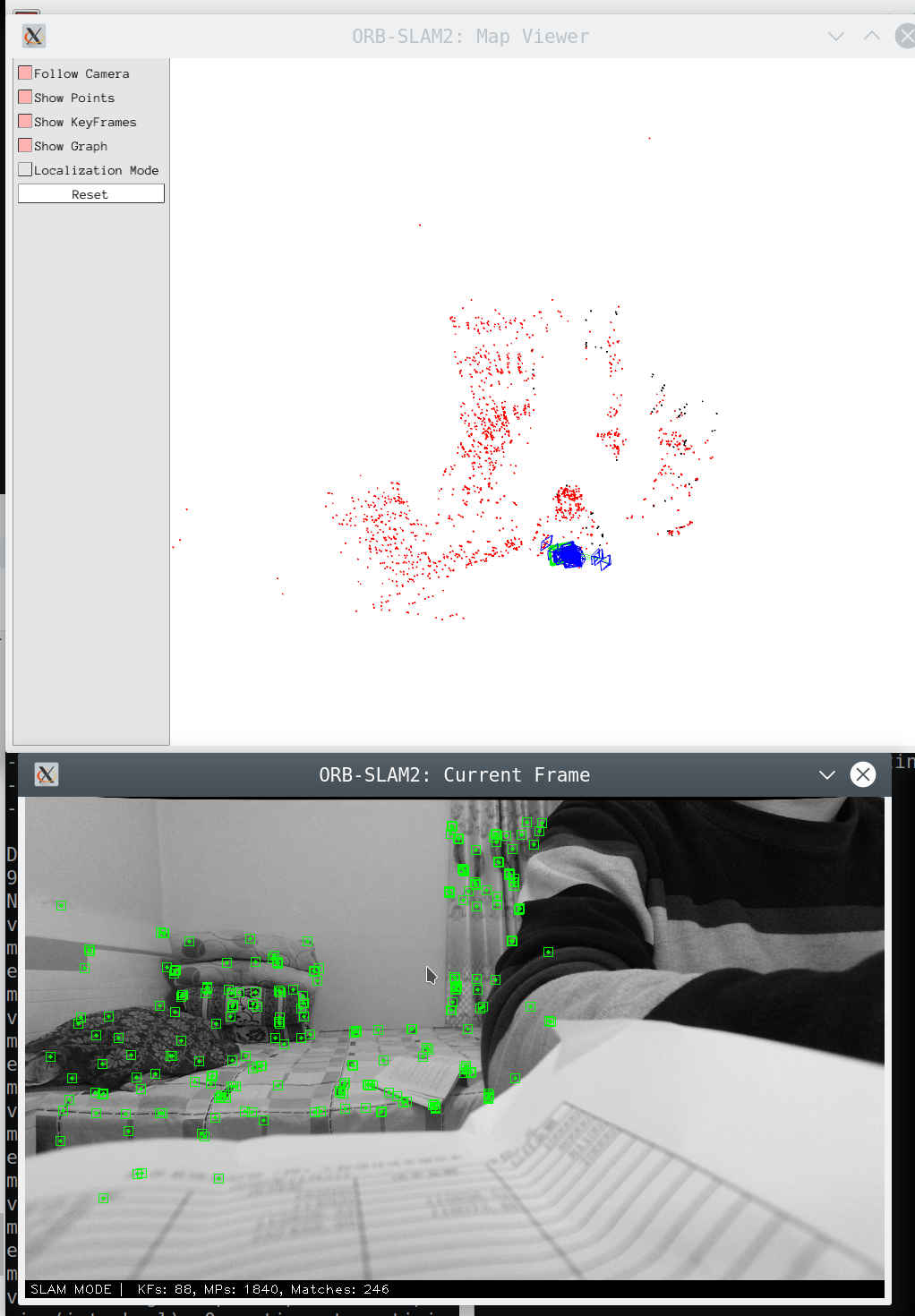
ORB_SLAM2为系数的三维点云,无法应用于导航和避障,且无法保存。
https://blog.csdn.net/YunLaowang/article/details/92809234