收入囊中
这里的非常多内容事实上在我的Computer
Vision: Algorithms and ApplicationsのImage processing中都有讲过
- 相关和卷积工作原理
- 边界处理
- 滤波器的工作原理
- 会使用均值滤波,高斯滤波
- 使用自己创造的核函数进行双线性滤波
- 可分离的滤波(加速)
葵花宝典
相关: g=f⊗h
卷积: g=f∗h
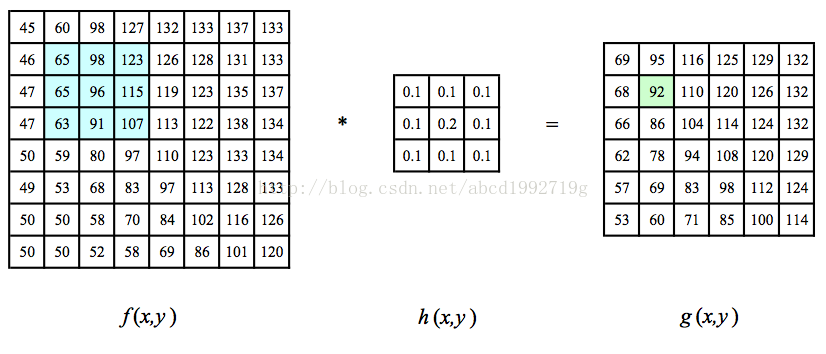
临时不考虑边缘。所以8*8的图形进行相关或卷积操作后就得到6*6的图形
由于我们的h(有时叫做核函数)是中心对称的,所以相关和卷积得到的结果是一样的
那不一样呢?看以下的样例,用个一维的样例,{x,y}是核函数,{a,b,c,d,e}是数据
Padding(border effects)
之前提到过,8*8的图像用3*3的核处理会成6*6,那么边界要怎么处理呢?
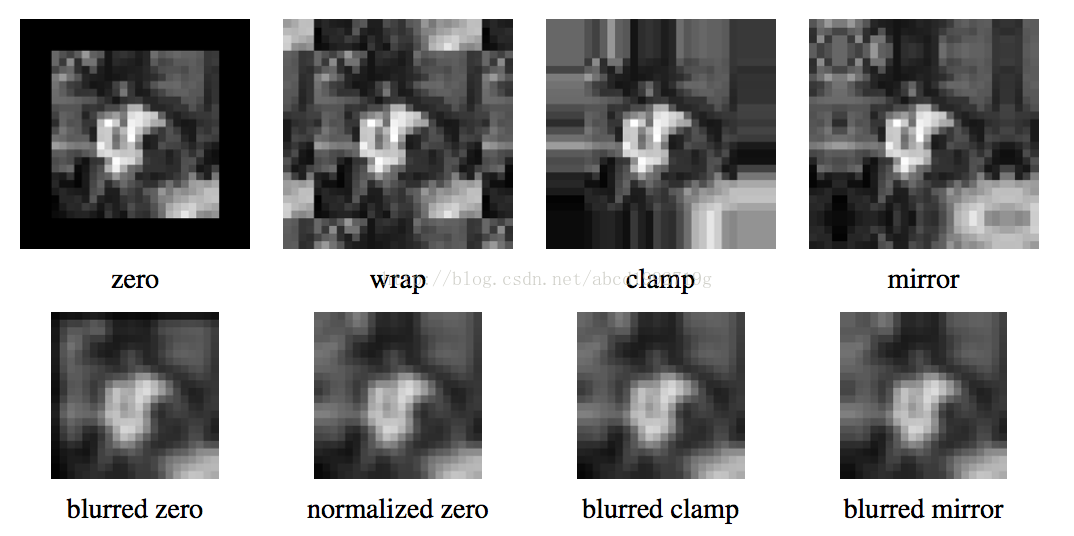
- 0填充。非常easy的处理方式
- 常数填充
- 夹取填塞(clamp),不断地复制边缘像素的值
- 重叠填塞(wrap),以环状形态围绕图像进行循环
- 镜像填塞(mirror),像素围绕图像边界进行镜像反射
- 延长(extend)。通过在边缘像素值中减去镜像信号的方式延长信号
以下是来自OpenCV的样例,边界处理没有CVAA上面那么丰富
/* Various border types, image boundaries are denoted with '|' * BORDER_REPLICATE: aaaaaa|abcdefgh|hhhhhhh * BORDER_REFLECT: fedcba|abcdefgh|hgfedcb * BORDER_REFLECT_101: gfedcb|abcdefgh|gfedcba * BORDER_WRAP: cdefgh|abcdefgh|abcdefg * BORDER_CONSTANT: iiiiii|abcdefgh|iiiiiii with some specified 'i' */
滤波器
今天讲的高斯低通滤波器。均值滤波器,双线性滤波器都是起到模糊的作用
低通滤波器抑制了图像的高频部分,使得低频分量畅通
今天是4月28日,在Coursera上有数字信号处理这门课开课。还有在网易公开课有斯坦福的傅立叶变换
假设你想非常深入了解,能够去学一下这两门课
滤波函数有时候又叫核函数,也能够叫算子
初识API
均值滤波
- C++: void blur(InputArray src, OutputArray dst, Size ksize, Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT )
-
- src – 原始图像
- dst – 输出图像
- ksize – 核函数大小
- anchor – 锚点,普通情况下默觉得(-1,-1)。意味着在中心进行卷积
- borderType – 边界类型
The function smoothes an image using the kernel:

高斯滤波。对去除正态分布的噪声非常实用
- C++: void GaussianBlur(InputArray src, OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, int borderType=BORDER_DEFAULT )
-
- src – 输入图像
- dst – 输出图像
- ksize – 核大小
- sigmaX – 控制幅度的參数(大家应该都学过或看过高斯函数吧,比方在正态分布中),假设sigmaX,sigmaY都为0,则由核的高度宽度自己计算
- sigmaY – 二维高斯函数有两个方向能够控制幅度。或这个不设置则和X一样
- borderType – 边界类型
用自己的核函数进行滤波
- C++: void filter2D(InputArray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor=Point(-1,-1), double delta=0, intborderType=BORDER_DEFAULT )
-
- src – 输入图像.
- dst – 输出图像.
- depth – ddepth=-1,输出图像具有和输入图像一样的depth
- kernel – 核函数,单通道浮点矩阵
- anchor – 同之前
- delta – 可选,直接加到输出图像
- borderType – 边界类型
荷枪实弹
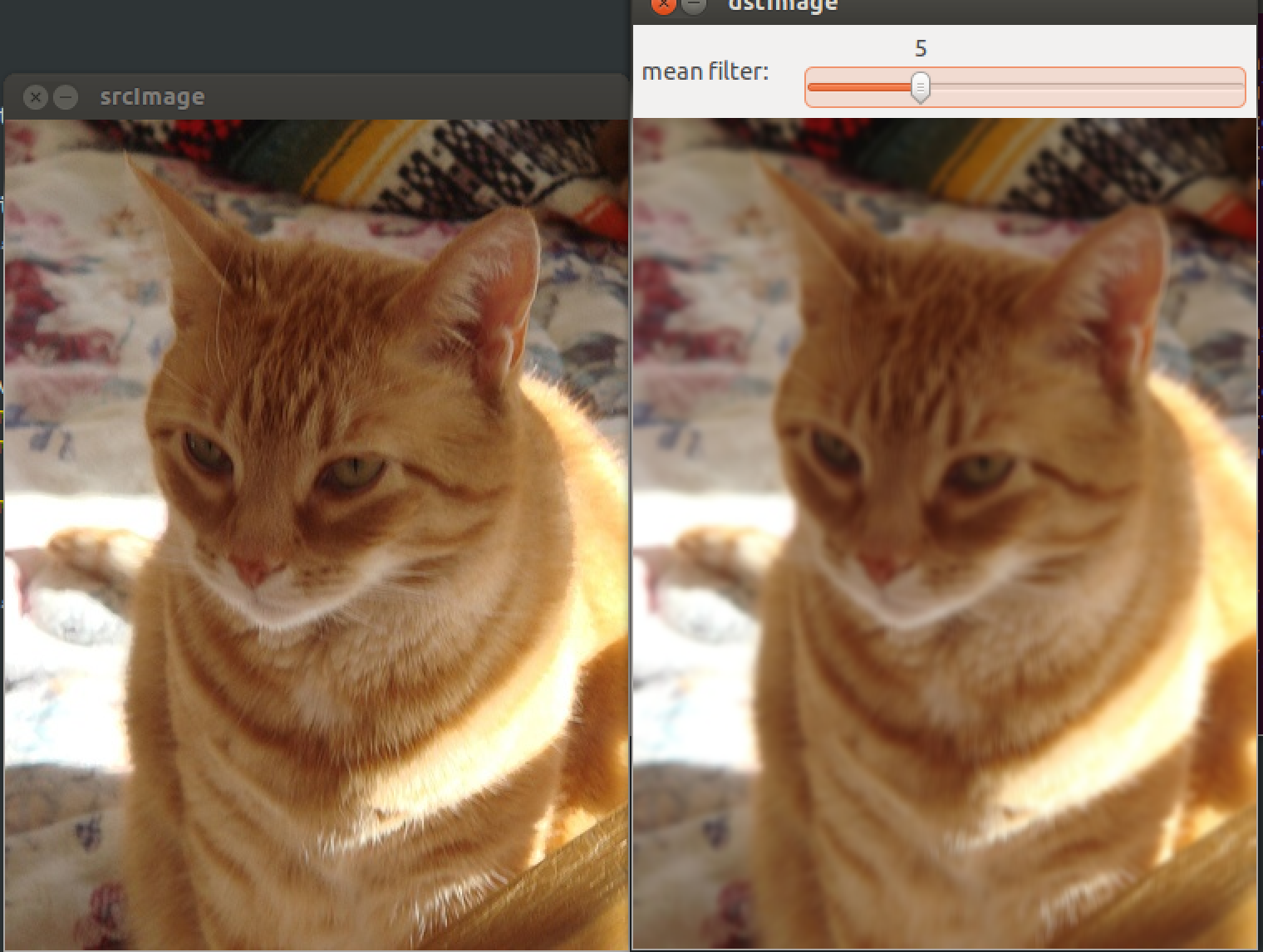
使用均值滤波
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst;
int i = 1;
static void change_dst(int, void*)
{
if(i%2 == 0)i++;
blur( src, dst, Size( i, i ), Point(-1,-1));
imshow("dstImage", dst);
}
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
createTrackbar( "mean filter:", "dstImage", &i, 20, change_dst);
change_dst(0, 0);
imshow("srcImage", src);
waitKey();
return 0;
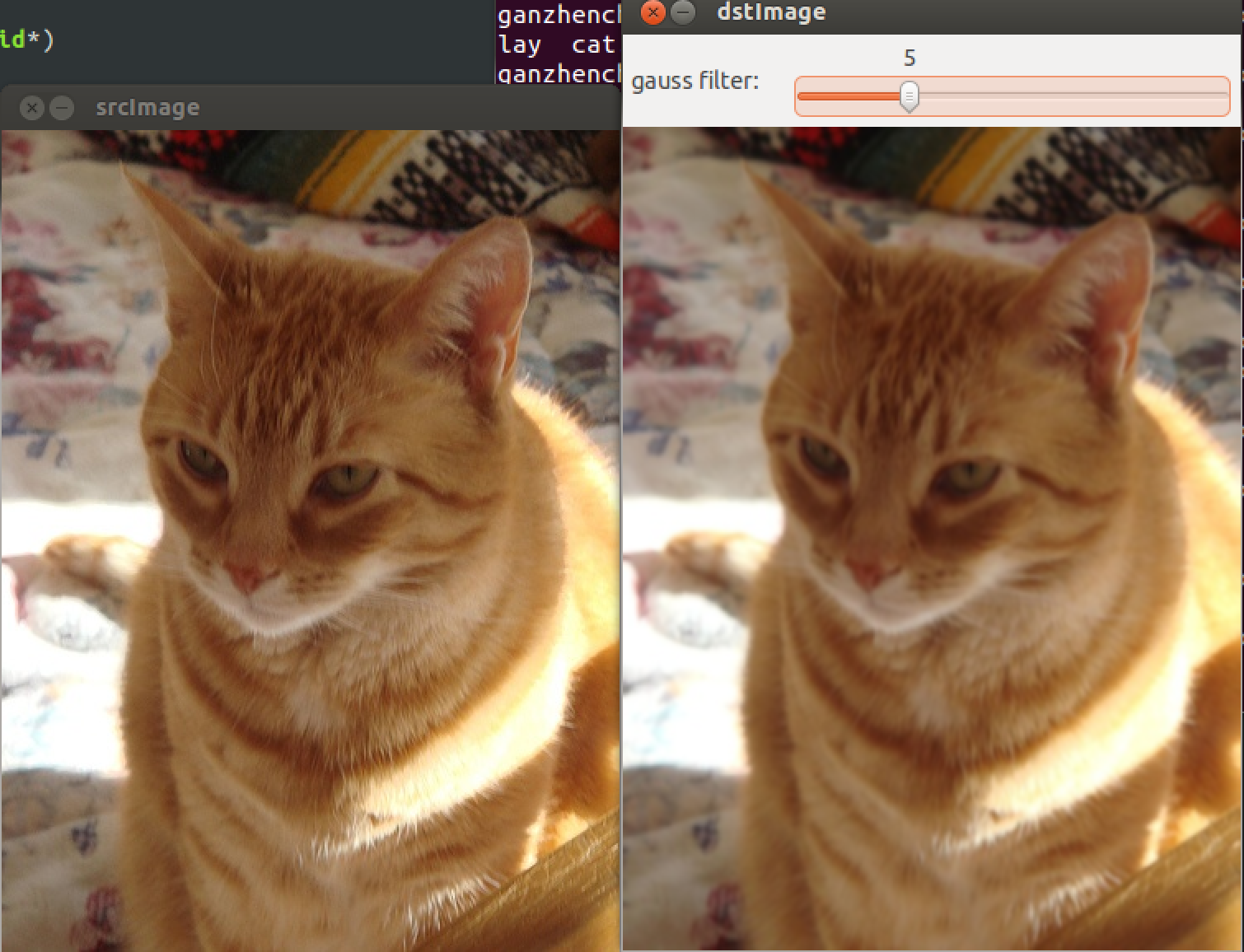
}使用高斯滤波
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst;
int i = 1;
static void change_dst(int, void*)
{
if(i%2 == 0)i++;
GaussianBlur( src, dst, Size( i, i ), 0, 0 );
imshow("dstImage", dst);
}
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
createTrackbar( "gauss filter:", "dstImage", &i, 20, change_dst);
change_dst(0, 0);
imshow("srcImage", src);
waitKey();
return 0;
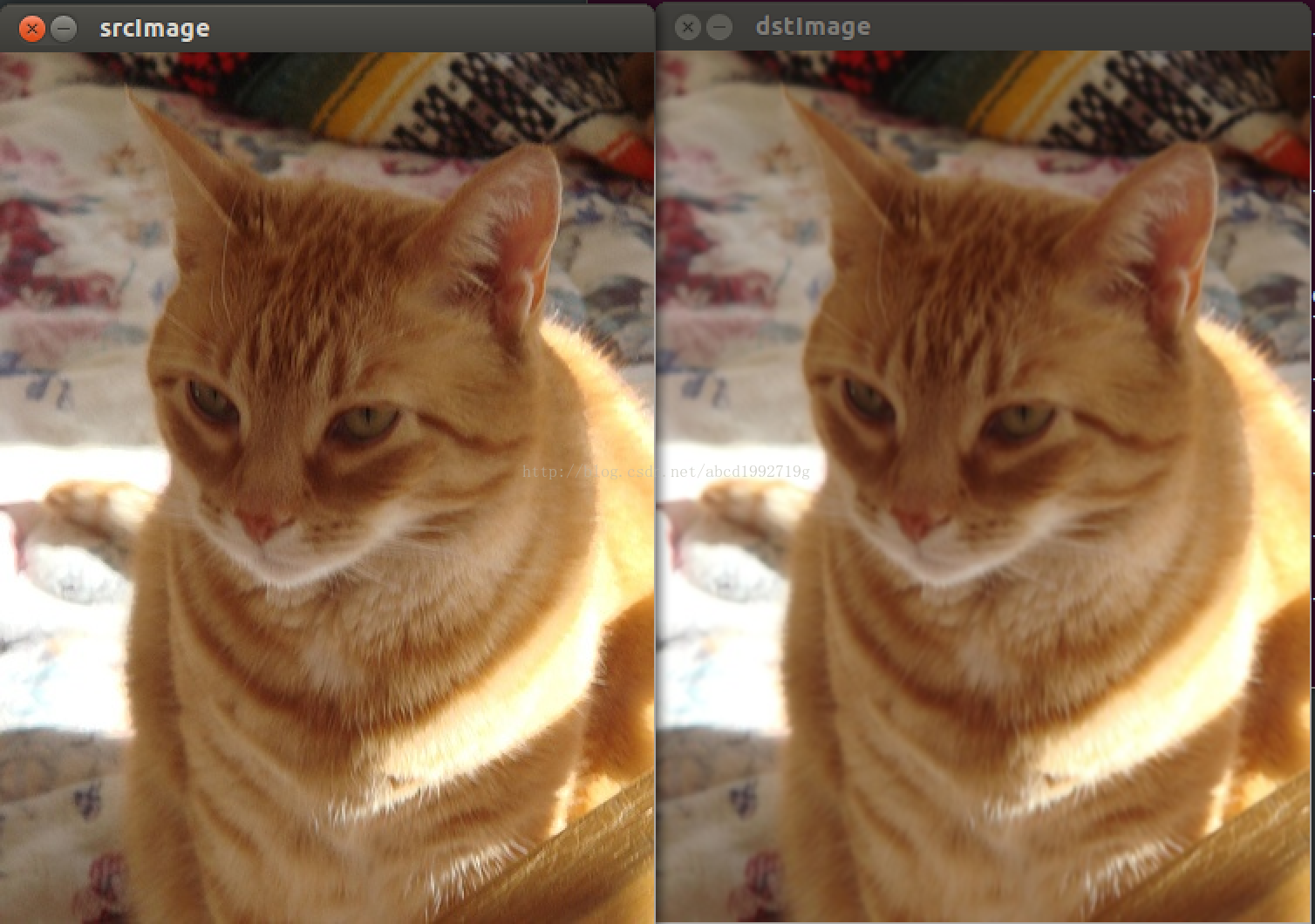
}使用自己定义线性滤波
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst,Kernel;
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
Kernel = (Mat_<double>(3,3) << 1, 2, 1, 2, 4, 2, 1, 2, 1)/16;
filter2D(src, dst, -1 , Kernel, Point(-1,-1));
imshow("dstImage", dst);
imshow("srcImage", src);
waitKey();
return 0;
}举一反三
可分离的滤波
二维高斯函数卷积能够分两步来进行,首先将图像与一维高斯函数进行卷积,然后将卷积结果与方向垂直的同样一维高斯函数卷积.因此,二维高斯滤波的计算量随滤波模板宽度成线性增长而不是成平方增长。
二维卷积运算,更新一个像素点肯定需要K2 次运算(K是核函数的大小)
文中提出了一种加速的方法,先用一维行向量进行卷积,再用一维列向量进行卷积。假设一个卷积核能够採用这样的方法计算,就是可分离的。(这样子就仅仅有2K次操作。非常神秘吧)
K =vhT
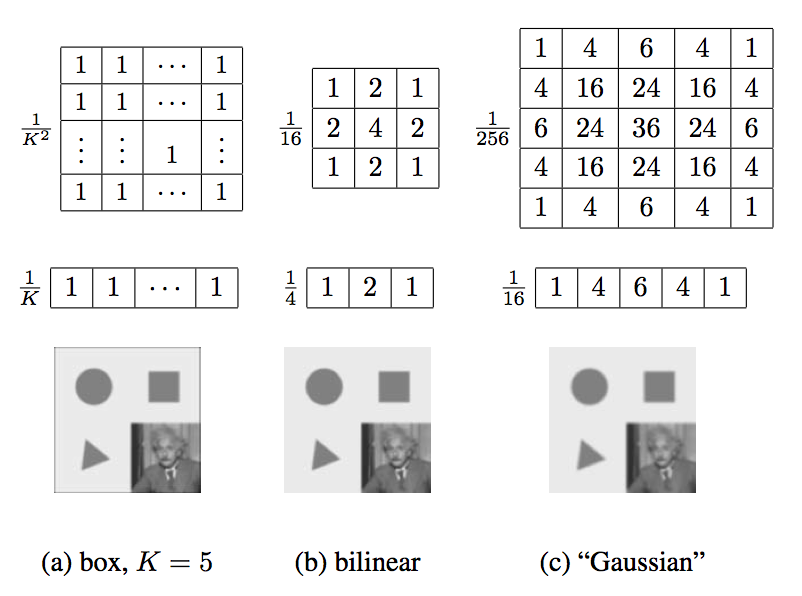
当然。并非全部K都能被拆分。我在上面的图片中的3个样例都是能够拆分的,一维向量已经列在二维以下
最简单的平均滤波,[1,1,1......,1]*[1,1,1......,1]T = K
再看第3个高斯核,[1,4,6,4,1]*[1,4,6,4,1]T = K
那么怎样推断核函数是不是可分离的呢?CVAA说用神秘值分解的办法
我的想法是,必需要满足中心对称。比方高斯函数,sigmax和sigmay相等的时候就能够分解
OpenCV帮我们实现了
- C++: void sepFilter2D(InputArray src, OutputArray dst, int ddepth, InputArray kernelX, InputArray kernelY, Point anchor=Point(-1,-1), doubledelta=0, int borderType=BORDER_DEFAULT )
-
- src – Source image.
- dst – Destination image of the same size and the same number of channels as src .
- ddepth –
- Destination image depth. The following combination of src.depth() and ddepth are supported:
-
- src.depth() = CV_8U, ddepth = -1/CV_16S/CV_32F/CV_64F
- src.depth() = CV_16U/CV_16S, ddepth = -1/CV_32F/CV_64F
- src.depth() = CV_32F, ddepth = -1/CV_32F/CV_64F
- src.depth() = CV_64F, ddepth = -1/CV_64F
when ddepth=-1, the destination image will have the same depth as the source.
- kernelX – Coefficients for filtering each row.
- kernelY – Coefficients for filtering each column.
- anchor – Anchor position within the kernel. The default value
 means
that the anchor is at the kernel center.
means
that the anchor is at the kernel center. - delta – Value added to the filtered results before storing them.
- borderType – Pixel extrapolation method. See borderInterpolate() for details.
由于效果和之前高斯滤波是一样的。就不贴图了,可是要注意尽管效果一样。可是速度可是大大提升。!
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
Mat src,dst,kernelX,kernelY;
int main( int, char** argv )
{
src = imread( argv[1] );
namedWindow("srcImage", 1);
namedWindow("dstImage", 1);
kernelX = (Mat_<double>(1,5) << 1,4,6,4,1)/16;
kernelY = (Mat_<double>(1,5) << 1,4,6,4,1)/16;
sepFilter2D(src, dst, -1, kernelX, kernelY);
imshow("dstImage", dst);
imshow("srcImage", src);
waitKey();
return 0;
}计算机视觉讨论群162501053
转载请注明:http://blog.csdn.net/abcd1992719g