当自己认为学会了的知识并且总结后以为自己明白了这部分知识时,再次学习才发现自己认识的很片面。也许这就是要书读百遍的意义所在吧。在学习《机器人学导论》这本书时,
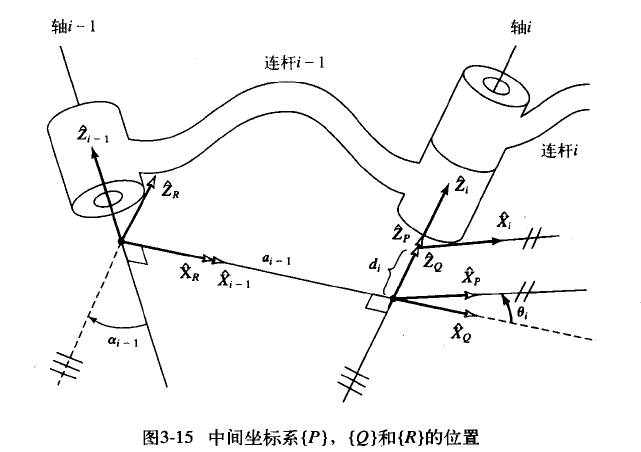
DH参数的建立正如公式上表达的那样。需要有四个参数,建立坐标系时,通过在相邻连杆的Z轴和X轴的建立,减少坐标的建立形式,在根据右手法则确定Y 轴。
坐标的建立分为两种形式:
旋转轴线作为Z轴:
①是相邻的连杆之间有公垂线时,坐标原点建立在公垂线与转轴的交点处,,X轴沿着垂线的方向指向下一连杆,Y轴由右手定则确定。
②是当两旋转轴相交时,二者便没有公垂线,这时坐标系建立在交点处,X轴垂直两Z轴的所在的平面。同样的Y轴由右手定则确定。
当这样建立坐标系后,使用DH参数建立操作臂的位姿变换矩阵,书中使用的是欧拉法建立连杆之间的变换矩阵。当相邻两个坐标系的轴之间姿态夹角为90°、180°时,建立坐标系姿态关系可以先直接写出,如图1-1所示
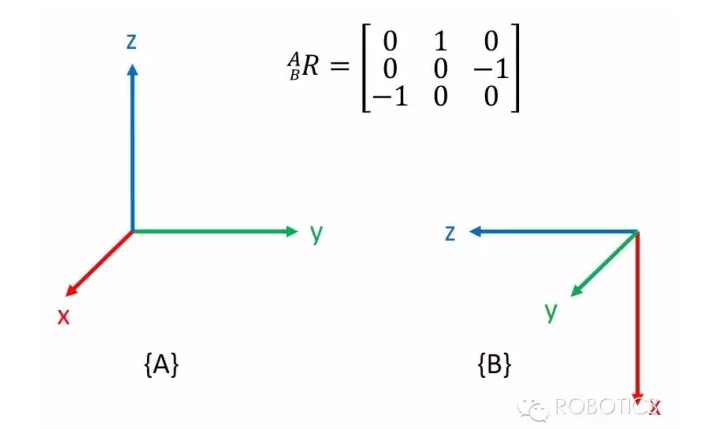
图1-1 {B}坐标在{A}中的表示(引用ROBOTICS微信公众号)
即坐标B在A中的坐标轴上的投影,将位置平关系和姿态写成4X4的齐次变换矩阵
变换关系即为
![]()
根据坐标系,当方向余弦为1时如图1.1,建立齐次变换矩阵后,再使用欧拉变换计算左乘旋转齐次矩阵关系较为简单。