第 1 关卡:安装和配置 ROS 环境
目标:在计算机上安装和配置 ROS 环境。
安装 ROS
按照 ROS 安装说明进行安装。
管理环境
确定环境变量 ROS_ROOT 和 ROS_PACKAGE_PATH 已经设置好了。以我的为例:
printenv | grep ROS
输出为:
ROS_ETC_DIR=/opt/ros/melodic/etc/ros ROS_ROOT=/opt/ros/melodic/share/ros ROS_MASTER_URI=http://localhost:11311 ROS_VERSION=1 ROS_PYTHON_VERSION=2 ROS_PACKAGE_PATH=/opt/ros/melodic/share ROSLISP_PACKAGE_DIRECTORIES= ROS_DISTRO=melodic
每次会话进入的时候都需要执行一次(注意 melodic 根据版本不同而更换):
source /opt/ros/melodic/setup.bash
为了方便,可以把这条语句放在 .bashrc 脚本中。
创建 ROS 工作空间
相对于 rosbuild 而言,catkin 是目前官方推荐的用于管理代码的方法。
创建一个 catkin 工作空间:
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make
这会创建出类似这样的目录结构:
.
├── build
│ ├── CATKIN_IGNORE
│ ├── CMakeCache.txt
│ ├── CMakeFiles
│ │ ├── 3.10.2
│ │ │ ├── CMakeCCompiler.cmake
│ │ │ ├── CMakeCXXCompiler.cmake
│ │ │ ├── CMakeDetermineCompilerABI_C.bin
│ │ │ ├── CMakeDetermineCompilerABI_CXX.bin
│ │ │ ├── CMakeSystem.cmake
│ │ │ ├── CompilerIdC
│ │ │ │ ├── CMakeCCompilerId.c
│ │ │ │ ├── a.out
│ │ │ │ └── tmp
│ │ │ └── CompilerIdCXX
│ │ │ ├── CMakeCXXCompilerId.cpp
│ │ │ ├── a.out
│ │ │ └── tmp
│ │ ├── CMakeDirectoryInformation.cmake
│ │ ├── CMakeError.log
│ │ ├── CMakeOutput.log
│ │ ├── CMakeRuleHashes.txt
│ │ ├── CMakeTmp
│ │ ├── Makefile.cmake
│ │ ├── Makefile2
│ │ ├── TargetDirectories.txt
│ │ ├── clean_test_results.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ ├── cmake.check_cache
│ │ ├── download_extra_data.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ ├── doxygen.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ ├── feature_tests.bin
│ │ ├── feature_tests.c
│ │ ├── feature_tests.cxx
│ │ ├── progress.marks
│ │ ├── run_tests.dir
│ │ │ ├── DependInfo.cmake
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ └── progress.make
│ │ └── tests.dir
│ │ ├── DependInfo.cmake
│ │ ├── build.make
│ │ ├── cmake_clean.cmake
│ │ └── progress.make
│ ├── CTestConfiguration.ini
│ ├── CTestCustom.cmake
│ ├── CTestTestfile.cmake
│ ├── Makefile
│ ├── atomic_configure
│ │ ├── _setup_util.py
│ │ ├── env.sh
│ │ ├── local_setup.bash
│ │ ├── local_setup.sh
│ │ ├── local_setup.zsh
│ │ ├── setup.bash
│ │ ├── setup.sh
│ │ └── setup.zsh
│ ├── catkin
│ │ └── catkin_generated
│ │ └── version
│ │ └── package.cmake
│ ├── catkin_generated
│ │ ├── env_cached.sh
│ │ ├── generate_cached_setup.py
│ │ ├── installspace
│ │ │ ├── _setup_util.py
│ │ │ ├── env.sh
│ │ │ ├── local_setup.bash
│ │ │ ├── local_setup.sh
│ │ │ ├── local_setup.zsh
│ │ │ ├── setup.bash
│ │ │ ├── setup.sh
│ │ │ └── setup.zsh
│ │ ├── order_packages.cmake
│ │ ├── order_packages.py
│ │ ├── setup_cached.sh
│ │ └── stamps
│ │ └── Project
│ │ ├── _setup_util.py.stamp
│ │ ├── interrogate_setup_dot_py.py.stamp
│ │ ├── order_packages.cmake.em.stamp
│ │ └── package.xml.stamp
│ ├── catkin_make.cache
│ ├── cmake_install.cmake
│ ├── gtest
│ │ ├── CMakeFiles
│ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ └── progress.marks
│ │ ├── CTestTestfile.cmake
│ │ ├── Makefile
│ │ ├── cmake_install.cmake
│ │ └── googlemock
│ │ ├── CMakeFiles
│ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ ├── gmock.dir
│ │ │ │ ├── DependInfo.cmake
│ │ │ │ ├── __
│ │ │ │ │ └── googletest
│ │ │ │ │ └── src
│ │ │ │ ├── build.make
│ │ │ │ ├── cmake_clean.cmake
│ │ │ │ ├── depend.make
│ │ │ │ ├── flags.make
│ │ │ │ ├── link.txt
│ │ │ │ ├── progress.make
│ │ │ │ └── src
│ │ │ ├── gmock_main.dir
│ │ │ │ ├── DependInfo.cmake
│ │ │ │ ├── __
│ │ │ │ │ └── googletest
│ │ │ │ │ └── src
│ │ │ │ ├── build.make
│ │ │ │ ├── cmake_clean.cmake
│ │ │ │ ├── depend.make
│ │ │ │ ├── flags.make
│ │ │ │ ├── link.txt
│ │ │ │ ├── progress.make
│ │ │ │ └── src
│ │ │ └── progress.marks
│ │ ├── CTestTestfile.cmake
│ │ ├── Makefile
│ │ ├── cmake_install.cmake
│ │ └── gtest
│ │ ├── CMakeFiles
│ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ ├── gtest.dir
│ │ │ │ ├── DependInfo.cmake
│ │ │ │ ├── build.make
│ │ │ │ ├── cmake_clean.cmake
│ │ │ │ ├── depend.make
│ │ │ │ ├── flags.make
│ │ │ │ ├── link.txt
│ │ │ │ ├── progress.make
│ │ │ │ └── src
│ │ │ ├── gtest_main.dir
│ │ │ │ ├── DependInfo.cmake
│ │ │ │ ├── build.make
│ │ │ │ ├── cmake_clean.cmake
│ │ │ │ ├── depend.make
│ │ │ │ ├── flags.make
│ │ │ │ ├── link.txt
│ │ │ │ ├── progress.make
│ │ │ │ └── src
│ │ │ └── progress.marks
│ │ ├── CTestTestfile.cmake
│ │ ├── Makefile
│ │ └── cmake_install.cmake
│ └── test_results
├── devel
│ ├── _setup_util.py
│ ├── cmake.lock
│ ├── env.sh
│ ├── lib
│ ├── local_setup.bash
│ ├── local_setup.sh
│ ├── local_setup.zsh
│ ├── setup.bash
│ ├── setup.sh
│ └── setup.zsh
└── src
└── CMakeLists.txt -> /opt/ros/melodic/share/catkin/cmake/toplevel.cmake
运行以下命令可以让该工作空间添加到 ROS 环境变量中,使得 ROS 可以识别:
source devel/setup.bash
查看 ROS 环境变量确认这个目录已经添加进来了:
echo $ROS_PACKAGE_PATH
我的环境变量如下:
/workspace/catkin_ws/src:/opt/ros/melodic/share
其中 /workspace/catkin_ws/src 是我新创建的工作空间。
第 2 关卡:浏览 ROS 文件系统
目标:介绍 ROS 文件系统概念,用到了 roscd,rosls,rospack 命令。
准备工作
下载:
sudo apt-get install ros-<distro>-ros-tutorials
<distro> 对应相应的版本。
ROS 文件系统概念
- 包(package):ROS 代码的软件组织单元。
- Manifests(package.xml):包的描述性文件。
文件系统工具
rospack
获取包信息:
rospack find roscpp
输出:
/opt/ros/melodic/share/roscpp
roscd
改变当前目录:
roscd roscpp
pwd
输出:
/opt/ros/melodic/share/roscpp
注意,这几个识别 ROS 包的命令都是根据 ROS 环境变量(ROS_PACKAGE_PATH)去找包的。
进入包内的子目录:
roscd roscpp/cmake/
pwd
输出:
/opt/ros/melodic/share/roscpp/cmake
进入 ROS 应用的日志目录:
roscd log
注意:如果还没有运行 ROS 输出日志的话,会显示:
No active roscore
之类的信息。
rosls
显示包内的文件:
rosls roscpp_tutorials
输出:
cmake launch package.xml srv
第 3 关卡:包的创建
目标:使用 roscreate-pkg 和 catkin 创建包,rospack 列出包的依赖。
catkin 包必须满足的条件:
- 包含描述性文件 package.xml
- 包含使用了 catkin 的 CMakeLists.txt 文件
- 每个包都有独立的目录,没有嵌套
最简单的包结构如下:
my_package/ CMakeLists.txt package.xml
典型的工作区中包结构的样子:
workspace_folder/ -- WORKSPACE
src/ -- SOURCE SPACE
CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin
package_1/
CMakeLists.txt -- CMakeLists.txt file for package_1
package.xml -- Package manifest for package_1
...
package_n/
CMakeLists.txt -- CMakeLists.txt file for package_n
package.xml -- Package manifest for package_n
创建 catkin 包
进入 src 目录并创建 catkin 包:
cd ~/catkin_ws/src
catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
catkin_create_pkg 会指定包名及其依赖:
# This is an example, do not try to run this # catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
工作区中包的编译
cd ~/catkin_ws
catkin_make
source devel/setup.bash
包依赖
查看一阶依赖:
rospack depends1 beginner_tutorials
输出:
roscpp rospy std_msgs
这些依赖可以在包描述性文件中查看:
roscd beginner_tutorials cat package.xml
输出:
<?xml version="1.0"?>
<package format="2">
<name>beginner_tutorials</name>
<version>0.0.0</version>
<description>The beginner_tutorials package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="root@todo.todo">root</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/beginner_tutorials</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
依赖也会有自己的依赖,比如:
rospack depends1 roscpp
输出:
cpp_common message_runtime rosconsole roscpp_serialization roscpp_traits rosgraph_msgs rostime std_msgs xmlrpcpp
要查看包的所有依赖(区别于一阶依赖):
rospack depends beginner_tutorials
输出:
cpp_common rostime roscpp_traits roscpp_serialization catkin genmsg genpy message_runtime gencpp geneus gennodejs genlisp message_generation rosbuild rosconsole std_msgs rosgraph_msgs xmlrpcpp roscpp rosgraph ros_environment rospack roslib rospy
包的定制化
修改 package.xml:
roscd beginner_tutorials vim package.xml
整个文件内容如下:
1 <?xml version="1.0"?> 2 <package format="2"> 3 <name>beginner_tutorials</name> 4 <version>0.0.0</version> 5 <description>The beginner_tutorials package</description> 6 7 <!-- One maintainer tag required, multiple allowed, one person per tag --> 8 <!-- Example: --> 9 <!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> --> 10 <maintainer email="root@todo.todo">root</maintainer> 11 12 13 <!-- One license tag required, multiple allowed, one license per tag --> 14 <!-- Commonly used license strings: --> 15 <!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 --> 16 <license>TODO</license> 17 18 19 <!-- Url tags are optional, but multiple are allowed, one per tag --> 20 <!-- Optional attribute type can be: website, bugtracker, or repository --> 21 <!-- Example: --> 22 <!-- <url type="website">http://wiki.ros.org/beginner_tutorials</url> --> 23 24 25 <!-- Author tags are optional, multiple are allowed, one per tag --> 26 <!-- Authors do not have to be maintainers, but could be --> 27 <!-- Example: --> 28 <!-- <author email="jane.doe@example.com">Jane Doe</author> --> 29 30 31 <!-- The *depend tags are used to specify dependencies --> 32 <!-- Dependencies can be catkin packages or system dependencies --> 33 <!-- Examples: --> 34 <!-- Use depend as a shortcut for packages that are both build and exec dependencies --> 35 <!-- <depend>roscpp</depend> --> 36 <!-- Note that this is equivalent to the following: --> 37 <!-- <build_depend>roscpp</build_depend> --> 38 <!-- <exec_depend>roscpp</exec_depend> --> 39 <!-- Use build_depend for packages you need at compile time: --> 40 <!-- <build_depend>message_generation</build_depend> --> 41 <!-- Use build_export_depend for packages you need in order to build against this package: --> 42 <!-- <build_export_depend>message_generation</build_export_depend> --> 43 <!-- Use buildtool_depend for build tool packages: --> 44 <!-- <buildtool_depend>catkin</buildtool_depend> --> 45 <!-- Use exec_depend for packages you need at runtime: --> 46 <!-- <exec_depend>message_runtime</exec_depend> --> 47 <!-- Use test_depend for packages you need only for testing: --> 48 <!-- <test_depend>gtest</test_depend> --> 49 <!-- Use doc_depend for packages you need only for building documentation: --> 50 <!-- <doc_depend>doxygen</doc_depend> --> 51 <buildtool_depend>catkin</buildtool_depend> 52 <build_depend>roscpp</build_depend> 53 <build_depend>rospy</build_depend> 54 <build_depend>std_msgs</build_depend> 55 <build_export_depend>roscpp</build_export_depend> 56 <build_export_depend>rospy</build_export_depend> 57 <build_export_depend>std_msgs</build_export_depend> 58 <exec_depend>roscpp</exec_depend> 59 <exec_depend>rospy</exec_depend> 60 <exec_depend>std_msgs</exec_depend> 61 62 63 <!-- The export tag contains other, unspecified, tags --> 64 <export> 65 <!-- Other tools can request additional information be placed here --> 66 67 </export> 68 </package>
更新第 5 行的 description:The very good beginner-tutorials package
更新第 10 行的维护者标签。
更新第 16 行的证书。
最终修改后的文件如下:
1 <?xml version="1.0"?> 2 <package format="2"> 3 <name>beginner_tutorials</name> 4 <version>0.0.0</version> 5 <description>The very good beginner_tutorials package</description> 6 7 <!-- One maintainer tag required, multiple allowed, one person per tag --> 8 <!-- Example: --> 9 <!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> --> 10 <maintainer email="1183851628@qq.com">heyulong</maintainer> 11 12 13 <!-- One license tag required, multiple allowed, one license per tag --> 14 <!-- Commonly used license strings: --> 15 <!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 --> 16 <license>BSD</license> 17 18 19 <!-- Url tags are optional, but multiple are allowed, one per tag --> 20 <!-- Optional attribute type can be: website, bugtracker, or repository --> 21 <!-- Example: --> 22 <!-- <url type="website">http://wiki.ros.org/beginner_tutorials</url> --> 23 24 25 <!-- Author tags are optional, multiple are allowed, one per tag --> 26 <!-- Authors do not have to be maintainers, but could be --> 27 <!-- Example: --> 28 <!-- <author email="jane.doe@example.com">Jane Doe</author> --> 29 30 31 <!-- The *depend tags are used to specify dependencies --> 32 <!-- Dependencies can be catkin packages or system dependencies --> 33 <!-- Examples: --> 34 <!-- Use depend as a shortcut for packages that are both build and exec dependencies --> 35 <!-- <depend>roscpp</depend> --> 36 <!-- Note that this is equivalent to the following: --> 37 <!-- <build_depend>roscpp</build_depend> --> 38 <!-- <exec_depend>roscpp</exec_depend> --> 39 <!-- Use build_depend for packages you need at compile time: --> 40 <!-- <build_depend>message_generation</build_depend> --> 41 <!-- Use build_export_depend for packages you need in order to build against this package: --> 42 <!-- <build_export_depend>message_generation</build_export_depend> --> 43 <!-- Use buildtool_depend for build tool packages: --> 44 <!-- <buildtool_depend>catkin</buildtool_depend> --> 45 <!-- Use exec_depend for packages you need at runtime: --> 46 <!-- <exec_depend>message_runtime</exec_depend> --> 47 <!-- Use test_depend for packages you need only for testing: --> 48 <!-- <test_depend>gtest</test_depend> --> 49 <!-- Use doc_depend for packages you need only for building documentation: --> 50 <!-- <doc_depend>doxygen</doc_depend> --> 51 <buildtool_depend>catkin</buildtool_depend> 52 <build_depend>roscpp</build_depend> 53 <build_depend>rospy</build_depend> 54 <build_depend>std_msgs</build_depend> 55 <build_export_depend>roscpp</build_export_depend> 56 <build_export_depend>rospy</build_export_depend> 57 <build_export_depend>std_msgs</build_export_depend> 58 <exec_depend>roscpp</exec_depend> 59 <exec_depend>rospy</exec_depend> 60 <exec_depend>std_msgs</exec_depend> 61 62 63 <!-- The export tag contains other, unspecified, tags --> 64 <export> 65 <!-- Other tools can request additional information be placed here --> 66 67 </export> 68 </package>
第 4 关卡:包的编译
目标:介绍编译包的工具链。
首先记得确认激活环境配置,在工作区下输入:
source devel/setup.bash
前面已经用过,使用 catkin_make 可以同时编译多个包:
# In a catkin workspace
$ catkin_make [make_targets] [-DCMAKE_VARIABLES=...]
这会自动编译 src 目录下的包。如果包名是自定义的,比如说 my_src,那么应该这样做:
# In a catkin workspace
catkin_make --source my_src
上一关卡修改了 package.xml,这里在工作区内输入:
catkin_make
输出:
Base path: /workspace/catkin_ws Source space: /workspace/catkin_ws/src Build space: /workspace/catkin_ws/build Devel space: /workspace/catkin_ws/devel Install space: /workspace/catkin_ws/install #### #### Running command: "make cmake_check_build_system" in "/workspace/catkin_ws/build" #### -- Using CATKIN_DEVEL_PREFIX: /workspace/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /workspace/catkin_ws/devel;/opt/ros/melodic -- This workspace overlays: /workspace/catkin_ws/devel;/opt/ros/melodic -- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.15", minimum required is "2") -- Using PYTHON_EXECUTABLE: /usr/bin/python2 -- Using Debian Python package layout -- Using empy: /usr/bin/empy -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /workspace/catkin_ws/build/test_results -- Found gmock sources under '/usr/src/googletest': gmock will be built -- Found PythonInterp: /usr/bin/python2 (found version "2.7.15") -- Found gtest sources under '/usr/src/googletest': gtests will be built -- Using Python nosetests: /usr/bin/nosetests-2.7 -- catkin 0.7.17 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 1 packages in topological order: -- ~~ - beginner_tutorials -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'beginner_tutorials' -- ==> add_subdirectory(beginner_tutorials) -- Configuring done -- Generating done -- Build files have been written to: /workspace/catkin_ws/build #### #### Running command: "make -j2 -l2" in "/workspace/catkin_ws/build" ####
第 5 关卡:认识 ROS 节点
目标:介绍 ROS 图的概念,使用 roscore、rosnode、rosrun 命令。
准备条件
apt-get install ros-<distro>-ros-tutorials
图概念介绍
- 节点(node):使用 ROS 与其他节点通信的可执行文件。
- 消息(message):当订阅或者发布主题时使用的 ROS 数据类型。
- 主题(topic):节点可以向主题发布消息,也可以向主题订阅消息。
- 主节点(master):ROS 的命名服务(name service),帮助各节点找到对方。
- rosout:ROS 中的 stdout/stderr。
- roscore:master、rosout、parameter 服务器。
节点
节点(node)就是 ROS 包中的可执行文件。ROS 节点使用 ROS 客户端库来与各节点进行通信。
节点可以发布或者订阅主题。
节点也可以提供或者消费服务。
客户端库
ROS 客户端可以允许用不同的语言编写的节点进行通信。
- rospy:Python 客户端库
- roscpp:C++ 客户端库
roscore
运行 roscore 开启 ROS 主服务:
roscore
输出:
... logging to /root/.ros/log/c10afc7a-da7e-11e9-bbfa-0242ac110004/roslaunch-57c67ed2b135-886.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://57c67ed2b135:38567/ ros_comm version 1.14.3 SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.3 NODES auto-starting new master process[master]: started with pid [896] ROS_MASTER_URI=http://57c67ed2b135:11311/ setting /run_id to c10afc7a-da7e-11e9-bbfa-0242ac110004 process[rosout-1]: started with pid [907] started core service [/rosout]
使用 rosnode
在运行 roscore 后,另外打开一个终端,输入:
rosnode list
输出:
/rosout
这说明当前只有一个 rosout 节点在运行,该节点总是在运行,为了收集记录节点的输出日志。
查看某节点的信息:
rosnode info /rosout
输出:
-------------------------------------------------------------------------------- Node [/rosout] Publications: * /rosout_agg [rosgraph_msgs/Log] Subscriptions: * /rosout [unknown type] Services: * /rosout/get_loggers * /rosout/set_logger_level contacting node http://57c67ed2b135:34783/ ... Pid: 907
使用 rosrun
rosrun 用于直接运行包中的节点:
rosrun [package_name] [node_name]
打开一个新的终端,输入:
rosrun turtlesim turtlesim_node

打开一个新的终端,输入:
rosnode list
输出:
/rosout /turtlesim
关闭 turtlesim 窗口,重新打开该节点,并且指定节点名:
rosrun turtlesim turtlesim_node __name:=my_turtle
在那个窗口输入 rosnode list 后显示:
/my_turtle /rosout
查看与某节点之间的通信:
rosnode ping my_turtle
输出:
rosnode: node is [/my_turtle] pinging /my_turtle with a timeout of 3.0s xmlrpc reply from http://57c67ed2b135:37817/ time=29.969931ms xmlrpc reply from http://57c67ed2b135:37817/ time=1.099825ms xmlrpc reply from http://57c67ed2b135:37817/ time=1.539230ms xmlrpc reply from http://57c67ed2b135:37817/ time=2.717018ms ......
第 6 关卡:认识 ROS 主题
目标:介绍 ROS 主题以及 rostopic 和 rqt_plot 命令的使用。
配置
接着上一关卡做的东西。
确保 roscore 以及运行起来了:
roscore
确保 turtlesim_node 运行起来了:
rosrun turtlesim turtlesim_node __name:=my_turtle
然后,在一个新的终端运行一个新节点:
rosrun turtlesim turtle_teleop_key
输出:
Reading from keyboard --------------------------- Use arrow keys to move the turtle.
在这个节点里动一动箭头键:

ROS 主题
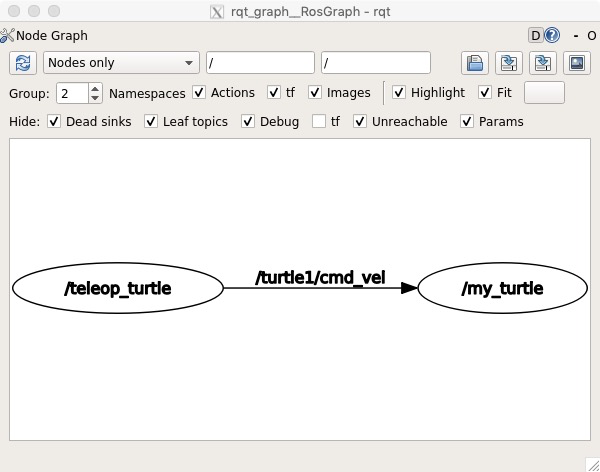
my_turtle 节点和 turtle_teleop_key 节点通过 ROS 主题(topic)进行通信。
turtle_teleop_key 以主题的方式发布按键,而 my_turtle 订阅该主题接收按键。
rqt_graph
使用 rqt_graph 创建 ROS 系统动态图结构。
安装:
apt-get install ros-<distro>-rqt apt-get install ros-<distro>-rqt-common-plugins
输入:
rosrun rqt_graph rqt_graph
得到:
rostopic
rostopic 用于获取 ROS 主题的信息。
rostopic -h
输出:
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
显示主题的发布数据:
rostopic echo /turtle1/cmd_vel
在发布按键主题的节点中活动箭头键后,这边的 rostopic 会显示出:
linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 2.0 --- linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 2.0 --- linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 2.0 --- linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 2.0 --- linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 2.0 --- linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 2.0 --- linear: x: -2.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 --- ......
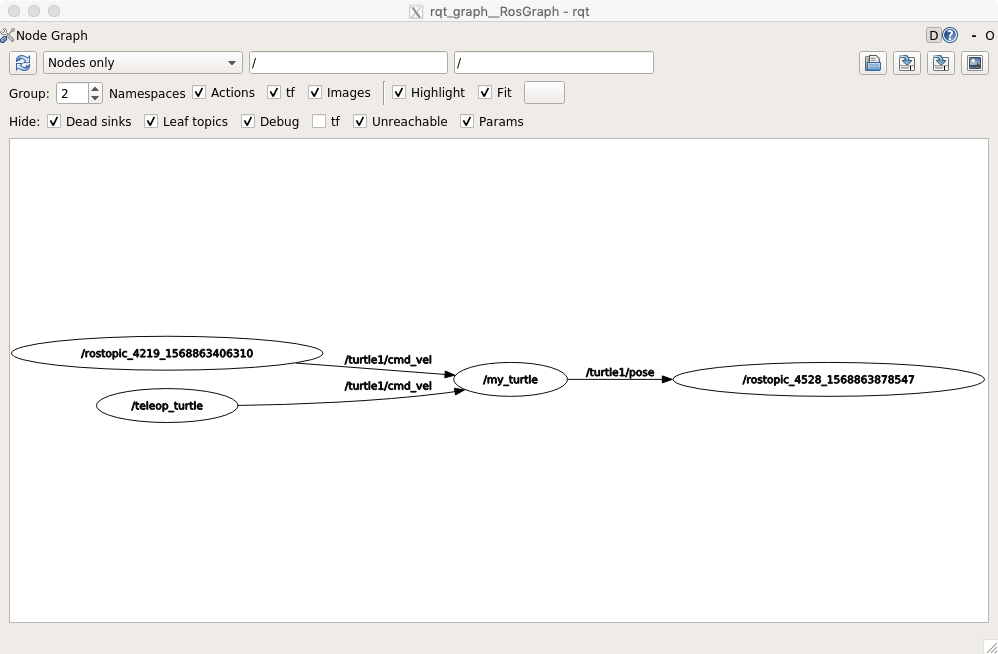
重新查看 rqt_graph 出的图(刷新或者重启),可以看到 rostopic 也订阅了 /turtle1/cmd_vel 主题了。

查看当前发布和订阅的主题:
rostopic list -v
输出:
Published topics: * /turtle1/color_sensor [turtlesim/Color] 1 publisher * /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher * /rosout [rosgraph_msgs/Log] 5 publishers * /rosout_agg [rosgraph_msgs/Log] 1 publisher * /turtle1/pose [turtlesim/Pose] 1 publisher Subscribed topics: * /turtle1/cmd_vel [geometry_msgs/Twist] 2 subscribers * /rosout [rosgraph_msgs/Log] 1 subscriber * /statistics [rosgraph_msgs/TopicStatistics] 2 subscribers
主题间的通信通过节点间发送的 ROS 消息(message)来实现。发布者和订阅者之间要通信,必须发送和接收相同的消息类型。
消息类型定义了主题的类型。
查看发布主题的消息类型:
# rostopic type [topic] rostopic type /turtle1/cmd_vel
输出:
geometry_msgs/Twist
使用 rostopic pub 发送某一主题的数据:
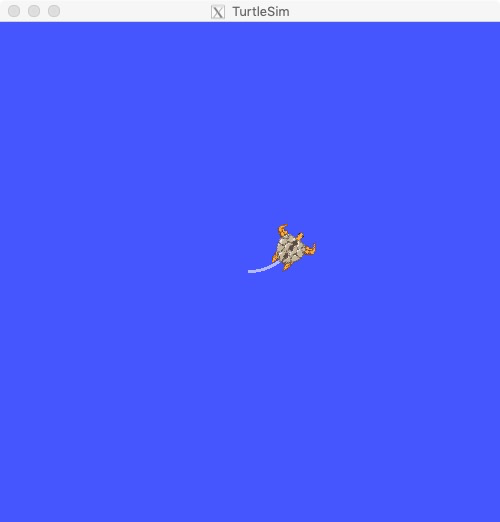
# rostopic pub [topic] [msg_type] [args] rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
效果如下:
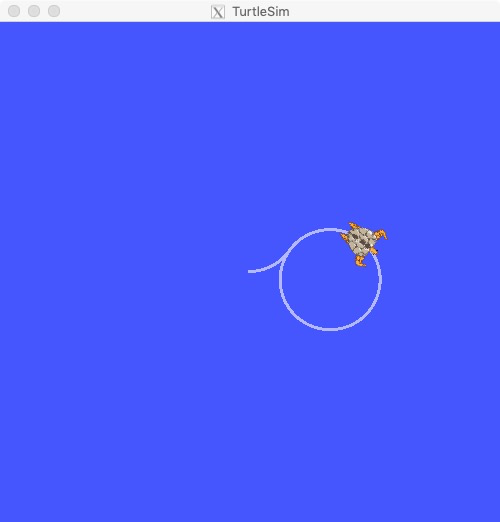
发布稳定的数据流:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
此时乌龟会不断地转圈移动:
查看目前的 ROS 图:

订阅查看 /turtle1/pose 主题:
rostopic echo /turtle1/pose
输出:
...... x: 5.10276937485 y: 5.45978927612 theta: 0.407544314861 linear_velocity: 2.0 angular_velocity: -1.79999995232 --- x: 5.13250160217 y: 5.47162103653 theta: 0.37874430418 linear_velocity: 2.0 angular_velocity: -1.79999995232 --- x: 5.16256189346 y: 5.48259210587 theta: 0.349944293499 linear_velocity: 2.0 angular_velocity: -1.79999995232 --- ......
查看目前的图结构:
使用 rostopic hz 查看主题发布的频率:
# rostopic hz [topic]
rostopic hz /turtle1/pose
输出:
subscribed to [/turtle1/pose]
average rate: 30.777
min: 0.030s max: 0.036s std dev: 0.00128s window: 29
average rate: 30.489
min: 0.030s max: 0.042s std dev: 0.00181s window: 60
average rate: 30.510
min: 0.029s max: 0.042s std dev: 0.00211s window: 90
average rate: 30.517
min: 0.029s max: 0.042s std dev: 0.00208s window: 121
average rate: 30.354
min: 0.029s max: 0.042s std dev: 0.00207s window: 151
average rate: 30.378
min: 0.029s max: 0.062s std dev: 0.00296s window: 181
average rate: 30.380
min: 0.029s max: 0.062s std dev: 0.00287s window: 212
average rate: 29.823
min: 0.029s max: 0.062s std dev: 0.00439s window: 237
...
可以看到 my_turtle 以 30Hz 的速率不断发数据。
查看消息的更多细节:
rostopic type /turtle1/cmd_vel | rosmsg show
输出:
geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z
输入:
rostopic type /turtle1/pose | rosmsg show
输出:
float32 x float32 y float32 theta float32 linear_velocity float32 angular_velocity
rqt_plot
rqt_plot 可以显示主题上发布的数据滚动式时间图。
rosrun rqt_plot rqt_plot
第 7 关卡:ROS 服务和参数
目标:熟悉 ROS 服务和参数,使用 rosservice 和 rosparam。
服务(servece)节点相互通信的另一种方式。服务使得节点可以发送请求和接收响应。
rosservice
rosservice 可以很容易用上 ROS 的客户端/服务端框架。
rosservice -h
输出:
Commands:
rosservice args print service arguments
rosservice call call the service with the provided args
rosservice find find services by service type
rosservice info print information about service
rosservice list list active services
rosservice type print service type
rosservice uri print service ROSRPC uri
Type rosservice <command> -h for more detailed usage, e.g. 'rosservice call -h'
rosservece list 显示当前服务的列表:
rosservice list
输出:
/clear /kill /my_turtle/get_loggers /my_turtle/set_logger_level /reset /rosout/get_loggers /rosout/set_logger_level /rostopic_4219_1568863406310/get_loggers /rostopic_4219_1568863406310/set_logger_level /rqt_gui_py_node_3673/get_loggers /rqt_gui_py_node_3673/set_logger_level /rqt_gui_py_node_4098/get_loggers /rqt_gui_py_node_4098/set_logger_level /rqt_gui_py_node_4237/get_loggers /rqt_gui_py_node_4237/set_logger_level /spawn /teleop_turtle/get_loggers /teleop_turtle/set_logger_level /turtle1/set_pen /turtle1/teleport_absolute /turtle1/teleport_relative
rosservice type 查询服务类型:
rosservice type /clear
输出:
std_srvs/Empty
Empty 表示该服务既没有参数也没有返回值。
rosservice call 调用服务:
# rosservice call [service] [args] rosservice call /clear
输入之后 my_turtle 节点的背景轨迹清空了:
rossrv show 查询 /spawn 的参数和返回值信息。
rosservice type /spawn | rossrv show
输出:
float32 x float32 y float32 theta string name --- string name
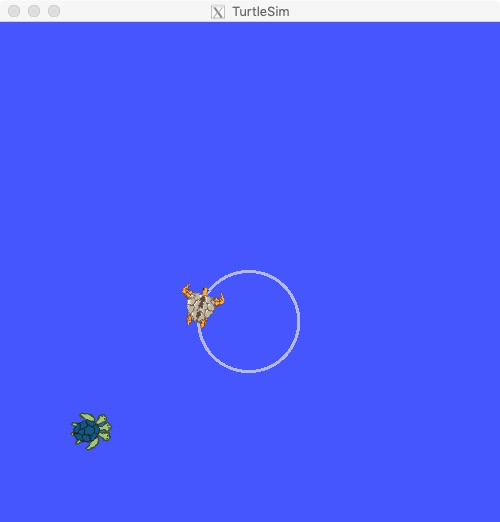
调用 /spawn 创建另一只乌龟:
rosservice call /spawn 2 2 0.2 "good turtle"
效果如下:
name: "good_turtle"
rosparam
rosparam 可以存储和操作 ROS 参数服务器(parameter server)上的数据。
参数服务器可以存储整型、浮点数、布尔型、字典和列表。
rosparame 使用 YAML 标记语言的语法。
rosparam -h
输出:
rosparam is a command-line tool for getting, setting, and deleting parameters from the ROS Parameter Server.
Commands:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
set 和 get:
设置参数:
# rosparam set [param_name] rosparam set /background_r 150 # refresh rosservice call /clear
效果如下:

获取参数:
# rosparam get [param_name]
rosparam get /background_g
输出:
86
显示参数服务器中所有的参数:
rosparam get /
输出:
background_b: 255
background_g: 86
background_r: 150
rosdistro: 'melodic
'
roslaunch:
uris: {host_57c67ed2b135__39317: 'http://57c67ed2b135:39317/'}
rosversion: '1.14.3
'
run_id: 9a92ffb2-da87-11e9-9b98-0242ac110004
rosparam 进行参数的持久化和加载
# usage
# rosparam dump [file_name] [namespace]
# rosparam load [file_name] [namespace]
rosparam dump 进行持久化:
rosparam dump params.yaml
会在当前目录生成一个 params.yaml 文件。
rosparam dump 加载参数到一个新的命名空间(如 version2):
rosparam load params.yaml version2
rosparam get /version2/background_b
返回:
255
第 8 关卡:使用 rqt_console 和 roslaunch
目标:使用 rqt_console 和 rqt_logger_level 进行调试;roslaunch 一次性启动多个节点。
准备条件
apt-get install ros-melodic-rqt ros-melodic-rqt-common-plugins ros-melodic-turtlesim
使用 rqt_console 和 rqt_logger_level
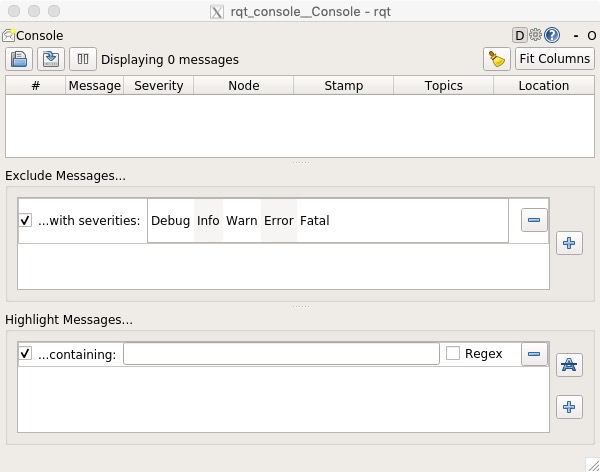
rqt_console 利用了 ROS 的日志框架,用于显示节点的输出。
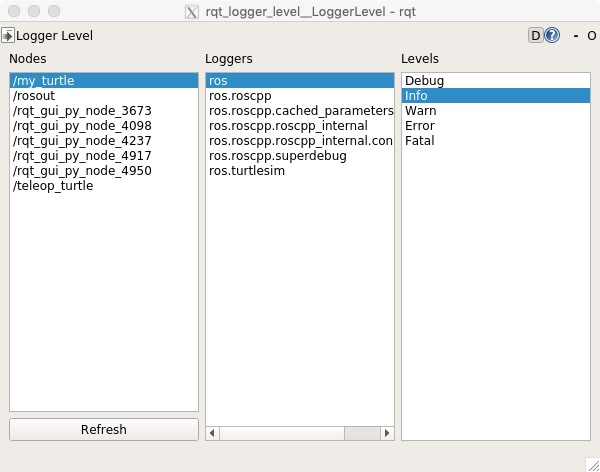
rqt_logger_level 可以用于调节日志的 verbosity 级别。
在两个终端分别运行两个命令,首先打开 console:
rosrun rqt_console rqt_console
然后打开 logger level:
rosrun rqt_logger_level rqt_logger_level
重启乌龟应用:
rosrun turtlesim turtlesim_node __name:=my_turtle
显示出来一条日志:

使用 roslaunch
# Usage
# roslaunch [package] [filename.launch]
进入 beginner_tutorials 目录:
source devel/setup.bash
roscd beginner_tutorials
创建 launch 目录:
mkdir launch cd launch
创建 Launch 文件:
vim turtlemimic.launch
1 <launch> 2 <group ns="turtlesim1"> 3 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 4 </group> 5 6 <group ns="turtlesim2"> 7 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 8 </group> 9 10 <node pkg="turtlesim" name="mimic" type="mimic"> 11 <remap from="input" to="turtlesim1/turtle1"/> 12 <remap from="output" to="turtlesim2/turtle1"/> 13 </node> 14 15 </launch>
注解:
- 第 1 行:表示这是个 launch 文件。
- 第 2-8 行:创建两个 turtlesim 节点,其命名空间不冲突。
- 第 10-13 行:创建一个 mimic 节点,其中 turtlesim2 会模仿 turtlesim1。
启动 launch 文件:
roslaunch beginner_tutorials turtlemimic.launch
再开一个终端向 turtlesim1 发送数据流:
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
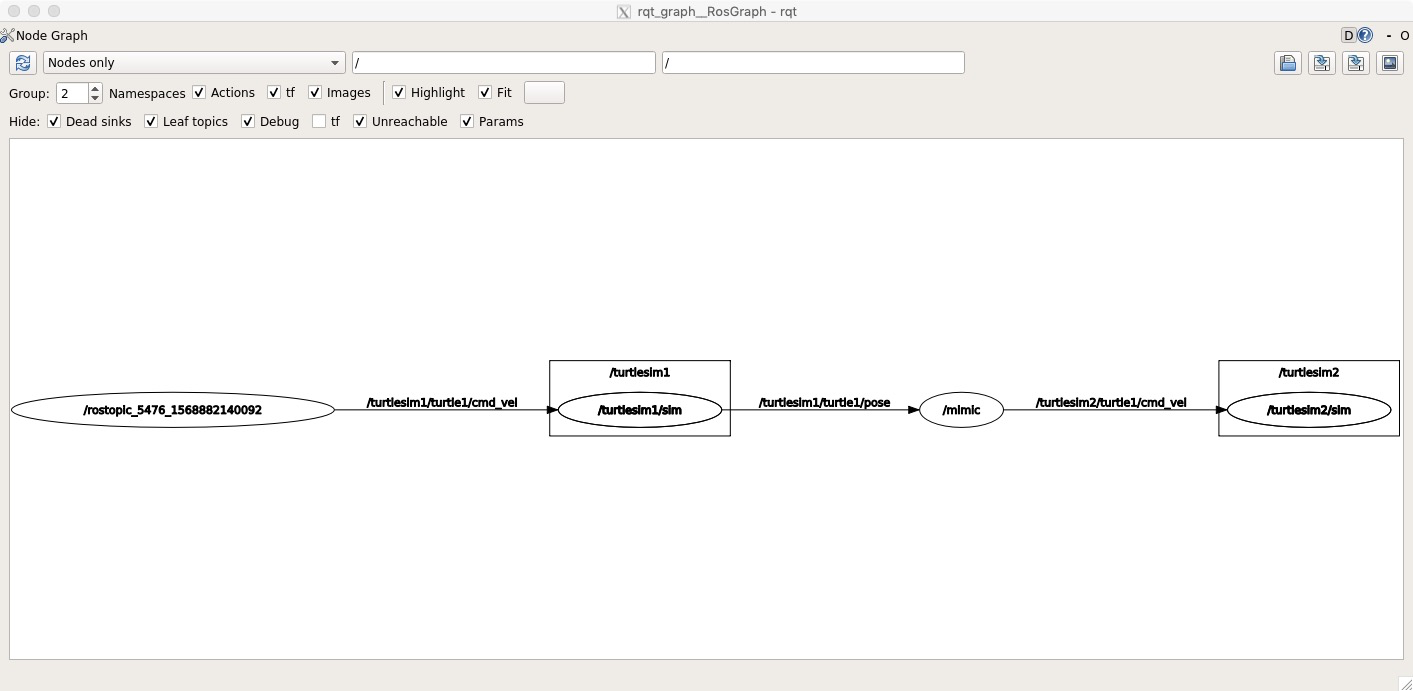
查看图结构:
rqt_graph
第 9 关卡:使用 rosed 修改 ROS 文件
目标:使用 rosed 进行编辑。
# Usage
# rosed [package_name] [filename]
修改 roscpp 包中的 Logger.msg 文件(默认使用 vim 打开)。
第 10 关卡:创建 ROS msg 和 srv
目标:创建和构建 msg 和 srv 文件;使用 rosmsg、rossrv、roscp 命令。
msg 和 srv 的介绍
- msg:msg 文件是描述 ROS 消息字段的文本文件。它用于生成不同编程语言的消息源代码。
- srv:srv 用于描述服务。它包含两部分:请求和响应。
msg 文件存储于包中的 msg 目录,而 srv 文件存储于 srv 目录。
在 msg 文件中,每行都是一个字段类型和对应的字段名称。
字段类型种类有:
- int8, int16, int32, int64 (plus uint*)
- float32, float64
- string
- time, duration
- 其他 msg 文件
- 变长数组 array[] 和固定长度数组 array[C]
ROS 中还有特殊的类型:Header,header 包含了时间戳和坐标系信息。
一个 msg 文件的例子:
Header header string child_frame_id geometry_msgs/PoseWithCovariance pose geometry_msgs/TwistWithCovariance twist
srv 文件与 msg 文件类似,只不过通过 --- 分割了请求和响应两部分。
int64 A int64 B --- int64 Sum
创建 msg 及其配置
创建一个 Num.msg 文件:
roscd beginner_tutorials mkdir msg echo "int64 num" > msg/Num.msg
为了保证该文件转换为其他语言的源代码,打开 package.xml,确保添加了以下两行:
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>
message_generation 在编译时有用,message_runtime 用在运行时。
打开 CMakeLists.txt 添加 message_generation 的依赖,这样才能生成消息。
## Find catkin macros and libraries ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz) ## is used, also find other catkin packages find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation )
并且确保道出了 message_runtime 依赖:
catkin_package( ... CATKIN_DEPENDS message_runtime ... ...)
还要添加 msg 文件:
add_message_files( FILES Num.msg )
确保 generate_messages 函数的调用:
generate_messages( DEPENDENCIES std_msgs )
使用 rosmsg
# Usage
# rosmsg show [message type]
生成一个消息:
catkin_make
rosmsg show beginner_tutorials/Num
输出:
int64 num
使用 srv
创建 srv 目录:
roscd beginner_tutorials mkdir srv
复制一个 srv 文件过去:
roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
文件的内容如下:
int64 a int64 b --- int64 sum
同样,配置 package.xml 文件,确保 srv 文件会转换为源代码(前面已经完成)。
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>
配置 CMakeLists.txt 文件,处理依赖(前面已经完成):
# Do not just add this line to your CMakeLists.txt, modify the existing line find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation )
注册服务文件:
add_service_files( FILES AddTwoInts.srv )
使用 rossrv
# Usage # rossrv show <service type>
编译后运行例子:
catkin_make rossrv show beginner_tutorials/AddTwoInts
输出:
int64 a int64 b --- int64 sum
第 11 关卡:编写简单的发布者和订阅者(C++)
目标:用 C++ 编写发布者和订阅者。
编写发布者节点
进入目录:
roscd beginner_tutorials mkdir src
创建 src/talker.cpp 文件:
1 #include "ros/ros.h" 2 #include "std_msgs/String.h" 3 4 #include <sstream> 5 6 /** 7 * This tutorial demonstrates simple sending of messages over the ROS system. 8 */ 9 int main(int argc, char **argv) 10 { 11 /** 12 * The ros::init() function needs to see argc and argv so that it can perform 13 * any ROS arguments and name remapping that were provided at the command line. 14 * For programmatic remappings you can use a different version of init() which takes 15 * remappings directly, but for most command-line programs, passing argc and argv is 16 * the easiest way to do it. The third argument to init() is the name of the node. 17 * 18 * You must call one of the versions of ros::init() before using any other 19 * part of the ROS system. 20 */ 21 ros::init(argc, argv, "talker"); 22 23 /** 24 * NodeHandle is the main access point to communications with the ROS system. 25 * The first NodeHandle constructed will fully initialize this node, and the last 26 * NodeHandle destructed will close down the node. 27 */ 28 ros::NodeHandle n; 29 30 /** 31 * The advertise() function is how you tell ROS that you want to 32 * publish on a given topic name. This invokes a call to the ROS 33 * master node, which keeps a registry of who is publishing and who 34 * is subscribing. After this advertise() call is made, the master 35 * node will notify anyone who is trying to subscribe to this topic name, 36 * and they will in turn negotiate a peer-to-peer connection with this 37 * node. advertise() returns a Publisher object which allows you to 38 * publish messages on that topic through a call to publish(). Once 39 * all copies of the returned Publisher object are destroyed, the topic 40 * will be automatically unadvertised. 41 * 42 * The second parameter to advertise() is the size of the message queue 43 * used for publishing messages. If messages are published more quickly 44 * than we can send them, the number here specifies how many messages to 45 * buffer up before throwing some away. 46 */ 47 ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); 48 49 ros::Rate loop_rate(10); 50 51 /** 52 * A count of how many messages we have sent. This is used to create 53 * a unique string for each message. 54 */ 55 int count = 0; 56 while (ros::ok()) 57 { 58 /** 59 * This is a message object. You stuff it with data, and then publish it. 60 */ 61 std_msgs::String msg; 62 63 std::stringstream ss; 64 ss << "hello world " << count; 65 msg.data = ss.str(); 66 67 ROS_INFO("%s", msg.data.c_str()); 68 69 /** 70 * The publish() function is how you send messages. The parameter 71 * is the message object. The type of this object must agree with the type 72 * given as a template parameter to the advertise<>() call, as was done 73 * in the constructor above. 74 */ 75 chatter_pub.publish(msg); 76 77 ros::spinOnce(); 78 79 loop_rate.sleep(); 80 ++count; 81 } 82 83 84 return 0; 85 }
该代码流程:
- 初始化 ROS 系统。
- 向 master 通知:以主题 chatter 发布 std_msgs/String 消息。
- 以 10 Hz 的频率进行消息发布。
编写订阅者节点
创建 listener.cpp 文件:
1 #include "ros/ros.h" 2 #include "std_msgs/String.h" 3 4 /** 5 * This tutorial demonstrates simple receipt of messages over the ROS system. 6 */ 7 void chatterCallback(const std_msgs::String::ConstPtr& msg) 8 { 9 ROS_INFO("I heard: [%s]", msg->data.c_str()); 10 } 11 12 int main(int argc, char **argv) 13 { 14 /** 15 * The ros::init() function needs to see argc and argv so that it can perform 16 * any ROS arguments and name remapping that were provided at the command line. 17 * For programmatic remappings you can use a different version of init() which takes 18 * remappings directly, but for most command-line programs, passing argc and argv is 19 * the easiest way to do it. The third argument to init() is the name of the node. 20 * 21 * You must call one of the versions of ros::init() before using any other 22 * part of the ROS system. 23 */ 24 ros::init(argc, argv, "listener"); 25 26 /** 27 * NodeHandle is the main access point to communications with the ROS system. 28 * The first NodeHandle constructed will fully initialize this node, and the last 29 * NodeHandle destructed will close down the node. 30 */ 31 ros::NodeHandle n; 32 33 /** 34 * The subscribe() call is how you tell ROS that you want to receive messages 35 * on a given topic. This invokes a call to the ROS 36 * master node, which keeps a registry of who is publishing and who 37 * is subscribing. Messages are passed to a callback function, here 38 * called chatterCallback. subscribe() returns a Subscriber object that you 39 * must hold on to until you want to unsubscribe. When all copies of the Subscriber 40 * object go out of scope, this callback will automatically be unsubscribed from 41 * this topic. 42 * 43 * The second parameter to the subscribe() function is the size of the message 44 * queue. If messages are arriving faster than they are being processed, this 45 * is the number of messages that will be buffered up before beginning to throw 46 * away the oldest ones. 47 */ 48 ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); 49 50 /** 51 * ros::spin() will enter a loop, pumping callbacks. With this version, all 52 * callbacks will be called from within this thread (the main one). ros::spin() 53 * will exit when Ctrl-C is pressed, or the node is shutdown by the master. 54 */ 55 ros::spin(); 56 57 return 0; 58 }
该代码的流程:
- 初始化 ROS 系统。
- 订阅 chatter 主题。
- spin:等待消息到达。
- 当消息到达时,调用 chatterCallback()。
编译节点
确保 CMakeLists.txt 的配置:
cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)
## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg)
## Declare ROS messages and services
add_message_files(FILES Num.msg)
add_service_files(FILES AddTwoInts.srv)
## Generate added messages and services
generate_messages(DEPENDENCIES std_msgs)
## Declare a catkin package
catkin_package()
## Build talker and listener
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener beginner_tutorials_generate_messages_cpp)
构建后会创建两个可执行文件 talker 和 listener,放在 ~/catkin_ws/devel/lib/<package name> 中。
在工作区上运行:
catkin_make
第 12 关卡:编写简单的发布者和订阅者(Python)
目标:用 Python 编写发布者和订阅者。
编写发布者节点
进入目录:
roscd beginner_tutorials mkdir scripts cd scripts
创建 talker.py:
1 #!/usr/bin/env python 2 import rospy 3 from std_msgs.msg import String 4 5 def talker(): 6 pub = rospy.Publisher('chatter', String, queue_size=10) 7 rospy.init_node('talker', anonymous=True) 8 rate = rospy.Rate(10) # 10hz 9 while not rospy.is_shutdown(): 10 hello_str = "hello world %s" % rospy.get_time() 11 rospy.loginfo(hello_str) 12 pub.publish(hello_str) 13 rate.sleep() 14 15 if __name__ == '__main__': 16 try: 17 talker() 18 except rospy.ROSInterruptException: 19 pass
编写订阅者节点
在 scripts 下面创建 listener.py 文件:
1 #!/usr/bin/env python 2 import rospy 3 from std_msgs.msg import String 4 5 def callback(data): 6 rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data) 7 8 def listener(): 9 10 # In ROS, nodes are uniquely named. If two nodes with the same 11 # name are launched, the previous one is kicked off. The 12 # anonymous=True flag means that rospy will choose a unique 13 # name for our 'listener' node so that multiple listeners can 14 # run simultaneously. 15 rospy.init_node('listener', anonymous=True) 16 17 rospy.Subscriber("chatter", String, callback) 18 19 # spin() simply keeps python from exiting until this node is stopped 20 rospy.spin() 21 22 if __name__ == '__main__': 23 listener()
编译节点
注意需要运行的 Python 脚本必须修改成可执行文件,scripts 目录下:
chmod +x talker.py chmod +x listener.py
工作区下面输入:
catkin_make
第 13 关卡:运行检查简单的发布者和订阅者
目标:运行检查编写好的发布者和订阅者。
运行发布者
工作区下面,启动主节点:
roscore
另开启一个终端激活环境:
source devel/setup.bash
运行发布者:
# C++
rosrun beginner_tutorials talker
# Python
rosrun beginner_tutorials talker.py
不断输出:
[INFO] [WallTime: 1314931831.774057] hello world 1314931831.77 [INFO] [WallTime: 1314931832.775497] hello world 1314931832.77 [INFO] [WallTime: 1314931833.778937] hello world 1314931833.78 [INFO] [WallTime: 1314931834.782059] hello world 1314931834.78 [INFO] [WallTime: 1314931835.784853] hello world 1314931835.78 [INFO] [WallTime: 1314931836.788106] hello world 1314931836.79
在另一个终端用同样的方式运行订阅者:
# C++ rosrun beginner_tutorials listener # Python rosrun beginner_tutorials listener.py
不断输出:
[INFO] [WallTime: 1314931969.258941] /listener_17657_1314931968795I heard hello world 1314931969.26 [INFO] [WallTime: 1314931970.262246] /listener_17657_1314931968795I heard hello world 1314931970.26 [INFO] [WallTime: 1314931971.266348] /listener_17657_1314931968795I heard hello world 1314931971.26 [INFO] [WallTime: 1314931972.270429] /listener_17657_1314931968795I heard hello world 1314931972.27 [INFO] [WallTime: 1314931973.274382] /listener_17657_1314931968795I heard hello world 1314931973.27 [INFO] [WallTime: 1314931974.277694] /listener_17657_1314931968795I heard hello world 1314931974.28 [INFO] [WallTime: 1314931975.283708] /listener_17657_1314931968795I heard hello world 1314931975.28
第 14 关卡:编写简单的服务器和客户端(C++)
目标:用 C++ 编写服务器和客户端节点。
编写服务器节点
在 beginner_tutorials/src 里编写 add_two_ints_server.cpp:
1 #include "ros/ros.h" 2 #include "beginner_tutorials/AddTwoInts.h" 3 4 bool add(beginner_tutorials::AddTwoInts::Request &req, 5 beginner_tutorials::AddTwoInts::Response &res) 6 { 7 res.sum = req.a + req.b; 8 ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b); 9 ROS_INFO("sending back response: [%ld]", (long int)res.sum); 10 return true; 11 } 12 13 int main(int argc, char **argv) 14 { 15 ros::init(argc, argv, "add_two_ints_server"); 16 ros::NodeHandle n; 17 18 ros::ServiceServer service = n.advertiseService("add_two_ints", add); 19 ROS_INFO("Ready to add two ints."); 20 ros::spin(); 21 22 return 0; 23 }
编写客户端节点
再创建 add_two_ints_client.cpp 文件:
1 #include "ros/ros.h" 2 #include "beginner_tutorials/AddTwoInts.h" 3 #include <cstdlib> 4 5 int main(int argc, char **argv) 6 { 7 ros::init(argc, argv, "add_two_ints_client"); 8 if (argc != 3) 9 { 10 ROS_INFO("usage: add_two_ints_client X Y"); 11 return 1; 12 } 13 14 ros::NodeHandle n; 15 ros::ServiceClient client = n.serviceClient<beginner_tutorials::AddTwoInts>("add_two_ints"); 16 beginner_tutorials::AddTwoInts srv; 17 srv.request.a = atoll(argv[1]); 18 srv.request.b = atoll(argv[2]); 19 if (client.call(srv)) 20 { 21 ROS_INFO("Sum: %ld", (long int)srv.response.sum); 22 } 23 else 24 { 25 ROS_ERROR("Failed to call service add_two_ints"); 26 return 1; 27 } 28 29 return 0; 30 }
编译节点
在 beginner_tutorials 包中的 CMakeLists.txt 添加配置:
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
target_link_libraries(add_two_ints_server ${catkin_LIBRARIES})
add_dependencies(add_two_ints_server beginner_tutorials_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
target_link_libraries(add_two_ints_client ${catkin_LIBRARIES})
add_dependencies(add_two_ints_client beginner_tutorials_gencpp)
最后在工作区进行编译:
# In your catkin workspace cd ~/catkin_ws catkin_make
第 15 关卡:编写简单的服务器和客户端(Python)
目标:用 Python 编写服务器和客户端节点。
编写服务器节点
在 beginner_tutorials/scripts 里编写 add_two_ints_server.py:
1 #!/usr/bin/env python 2 3 from beginner_tutorials.srv import AddTwoInts,AddTwoIntsResponse 4 import rospy 5 6 def handle_add_two_ints(req): 7 print "Returning [%s + %s = %s]"%(req.a, req.b, (req.a + req.b)) 8 return AddTwoIntsResponse(req.a + req.b) 9 10 def add_two_ints_server(): 11 rospy.init_node('add_two_ints_server') 12 s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints) 13 print "Ready to add two ints." 14 rospy.spin() 15 16 if __name__ == "__main__": 17 add_two_ints_server()
使脚本可执行:
chmod +x add_two_ints_server.py
编写客户端节点
再创建 add_two_ints_client.py 文件:
#!/usr/bin/env python import sys import rospy from beginner_tutorials.srv import * def add_two_ints_client(x, y): rospy.wait_for_service('add_two_ints') try: add_two_ints = rospy.ServiceProxy('add_two_ints', AddTwoInts) resp1 = add_two_ints(x, y) return resp1.sum except rospy.ServiceException, e: print "Service call failed: %s"%e def usage(): return "%s [x y]"%sys.argv[0] if __name__ == "__main__": if len(sys.argv) == 3: x = int(sys.argv[1]) y = int(sys.argv[2]) else: print usage() sys.exit(1) print "Requesting %s+%s"%(x, y) print "%s + %s = %s"%(x, y, add_two_ints_client(x, y))
使脚本可执行:
chmod +x add_two_ints_client.py
最后编译一下即可。
第 16 关卡:运行检查简单的服务器和客户端
目标:运行检查编写好的服务器和客户端。
运行服务器
工作区下面,启动主节点:
roscore
另开启一个终端激活环境:
source devel/setup.bash
运行服务器:
# C++
rosrun beginner_tutorials add_two_ints_server
# Python
rosrun beginner_tutorials add_two_ints_server.py
输出:
[ INFO] [1568949373.838082500]: Ready to add two ints.
运行客户端
运行客户端:
# C++
rosrun beginner_tutorials add_two_ints_client 1 3
# Python
rosrun beginner_tutorials add_two_ints_client.py 1 3
输出:
[ INFO] [1568949401.094979600]: Sum: 4
第 17 关卡:录制和播放数据
目标:从运行的 ROS 系统上将数据录制为 .bag 文件;重新播放 .bag 文件上的数据。
录制数据
这里解决如何从运行的 ROS 系统中录制主题数据,主题数据最终会汇聚为一个 bag 文件。
下面执行我们前面已经熟悉了几个操作。
终端 1:
roscore
终端 2:
rosrun turtlesim turtlesim_node
终端 3:
rosrun turtlesim turtle_teleop_key
查看当前运行系统中发布的主题列表:
rostopic list -v
输出:
Published topics: * /turtle1/color_sensor [turtlesim/Color] 1 publisher * /rosout [rosgraph_msgs/Log] 2 publishers * /rosout_agg [rosgraph_msgs/Log] 1 publisher * /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher * /turtle1/pose [turtlesim/Pose] 1 publisher Subscribed topics: * /turtle1/cmd_vel [geometry_msgs/Twist] 1 subscriber * /rosout [rosgraph_msgs/Log] 1 subscriber
其中,/turtle1/cmd_vel 是 teleop_turtle 发布的主题数据。
打开新终端,运行命令录制所有正在发布的主题数据(rosbag record):
mkdir ~/bagfiles cd ~/bagfiles rosbag record -a
然后在 turtle_teleop 终端里面滑动方向键,移动乌龟十来秒,接着在最新的 rosbag record 命令的终端窗口下面终止进程。查看当前目录,可以发现已经生成了一个新的 bag 文件。
2019-09-19-17-55-44.bag
这个 bag 文件现在包含了所有 rosbag record 期间的所有节点发布的主题数据。
检查并播放 bag 文件
使用 rosbag info 检查 bag 文件信息:
rosbag info 2019-09-19-17-55-44.bag
输出:
path: 2019-09-19-17-55-44.bag
version: 2.0
duration: 57.9s
start: Sep 19 2019 17:55:44.60 (1568886944.60)
end: Sep 19 2019 17:56:42.50 (1568887002.50)
size: 413.4 KB
messages: 5842
compression: none [1/1 chunks]
types: geometry_msgs/Twist [9f195f881246fdfa2798d1d3eebca84a]
rosgraph_msgs/Log [acffd30cd6b6de30f120938c17c593fb]
turtlesim/Color [353891e354491c51aabe32df673fb446]
turtlesim/Pose [863b248d5016ca62ea2e895ae5265cf9]
topics: /rosout 5 msgs : rosgraph_msgs/Log (2 connections)
/turtle1/cmd_vel 105 msgs : geometry_msgs/Twist
/turtle1/color_sensor 2869 msgs : turtlesim/Color
/turtle1/pose 2863 msgs : turtlesim/Pose
接下来重播 bag 文件以生成 ROS 当时运行时的行为。
首先中断 teleop 程序,免得它一直发数据。而 turtlesim 继续运行。
接着运行命令:
rosbag play <your bagfile>
进行播放,最后输出:
[ INFO] [1568887897.273155900]: Opening 2019-09-19-17-55-44.bag Waiting 0.2 seconds after advertising topics... done. Hit space to toggle paused, or 's' to step. [RUNNING] Bag Time: 1568887002.474074 Duration: 57.874504 / 57.904033 Done.
这个时候乌龟会继续按照之前记录好的套路动起来。
记录数据的子集
rosbag record 支持录制特定主题的数据。
rosbag record -O subset /turtle1/cmd_vel /turtle1/pose
故技重施,生成了文件 subset.bag 文件。-O 指定了文件名,后面跟的两个参数制定了特定的主题。
rosbag info subset.bag
输出:
path: subset.bag
version: 2.0
duration: 38.1s
start: Sep 19 2019 18:22:02.74 (1568888522.74)
end: Sep 19 2019 18:22:40.83 (1568888560.83)
size: 144.5 KB
messages: 1787
compression: none [1/1 chunks]
types: geometry_msgs/Twist [9f195f881246fdfa2798d1d3eebca84a]
turtlesim/Pose [863b248d5016ca62ea2e895ae5265cf9]
topics: /turtle1/cmd_vel 72 msgs : geometry_msgs/Twist
/turtle1/pose 1715 msgs : turtlesim/Pose
参考: