开门见山:tileset.modelMatrix
这个属性可以在数据本身的基础上再进行坐标变换,不熟悉转换矩阵各个部分的含义的可参考图形学有关资料。
此文不一定是最佳算法,但是提供一种思路。转载请注明出处 全网@秋意正寒 。
平移思路
- 获取当前瓦片数据集的包裹范围(boundingSphere)中心(此时参考系是世界坐标)
- 计算当参考系是局部坐标时,此位置为原点的局部坐标系,到世界坐标的转换矩阵(eastNorthUpToFixedFrame)
- 利用上一步的转换矩阵,左乘一个局部平移向量,得到此平移向量在世界坐标系下的平移目标位置(矩阵×向量,结果是向量)
- 向量相减:世界坐标系下,指向平移目标点位的目标向量 - 指向数据集中心的向量,得到世界坐标系下的平移向量。
- 将世界坐标系下的平移向量转换成平移矩阵,赋予
tileset.modelMatrix
代码
tileset
.readyPromise
.then(tileset => {
const tileset_center = tileset.boundingSphere.center; // Cartesian3
const frompoint_to_world_matrix = Cesium.Transforms.eastNorthUpToFixedFrame(tileset_center); // Matrix4
const local_translation = new Cesium.Cartesian3(310, -140, 10); // 向模型中心为原点,正北为y,正东为x,地心朝上为z分别平移 310、-140、10米
const result = new Cesium.Cartesian3(0,0,0);
Cesium.Matrix4.multiplyByPoint(frompoint_to_world_matrix, local_translation, result); // 转换矩阵左乘局部平移向量,结果存储在 result 中,结果是世界坐标下的平移终点向量
const targetpoint_to_world_matrix = Cesium.Transforms.eastNorthUpToFixedFrame(result);
const world_translation = new Cesium.Cartesian3(
targetpoint_to_world_matrix[12] - frompoint_to_world_matrix[12],
targetpoint_to_world_matrix[13] - frompoint_to_world_matrix[13],
targetpoint_to_world_matrix[14] - frompoint_to_world_matrix[14],
); // 向量相减,得到世界坐标下的平移向量
tileset.modelMatrix = Cesium.Matrix4.fromTranslation(world_translation); // 构造平移矩阵并赋值
viewer.zoomTo(tileset);
});
图解
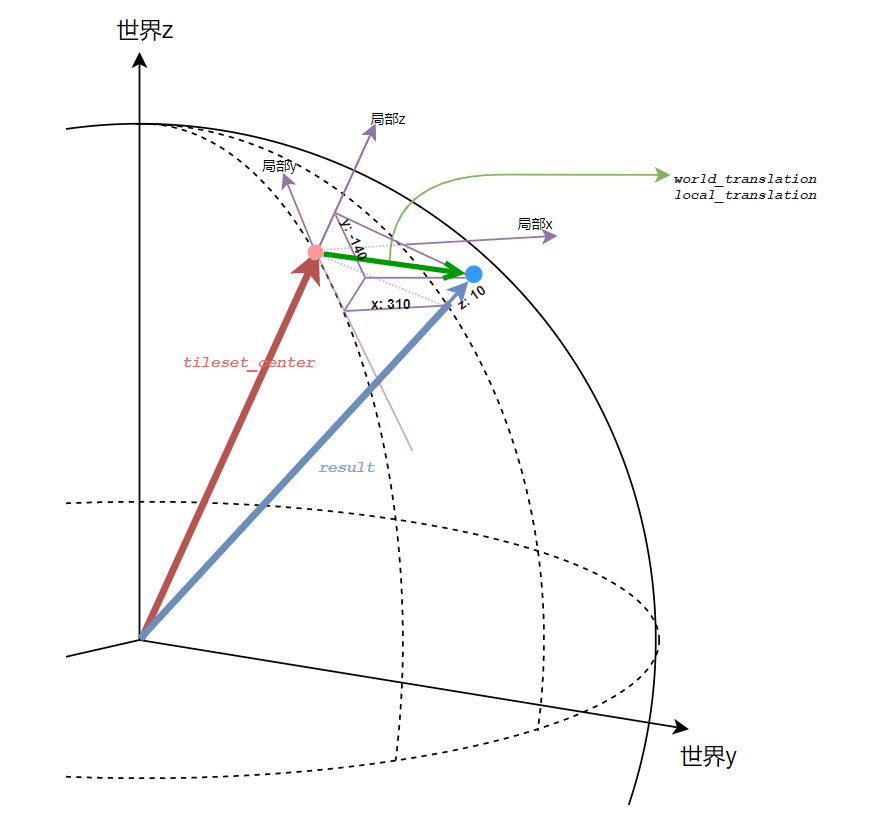
解释:
- 红点:frompoint(地表点)
- 蓝点:targetpoint(frompoint局部坐标向东向北向上偏移各 310、-140、10米 后得到的目标点)
- 红向量:地表点向量
- 蓝向量:目标点向量
- 绿向量:平移向量。如果是局部坐标,那么就是 (310, -140, 10),如果是世界坐标下的,那就是 蓝向量 - 红向量
cesium 的场景数据最终都是世界坐标的,所以要求的是绿向量的世界坐标表达,然后构造平移矩阵。
现在是已知红向量和局部坐标的绿向量,要先求蓝向量,才能得到世界坐标的绿向量。
平移思路二
先平移到世界坐标中心,然后在世界坐标中心求平移,最后再移动回原点。
tileset.modelMatrix (= M_{backToOrigin}·M_{localTranslation}·M_{moveToWorldCenter})
读者可自行实现。
旋转思路
局部旋转,应该先将模型移动到世界坐标中心,旋转后,再移动到原来的地方
即
tileset.modelMatrix (= M_{backToOrigin}·M_{localRotate}·M_{moveToWorldCenter})
其中,(M_{moveToWorldCenter}) 是一个平移矩阵,只需使用模型中心向量取个负值即可
(M_{backToOrigin}) 则是从世界坐标中心再移动到模型原点
注意,这里是左乘优先顺序,从右往左乘。
旋转矩阵比较容易构造,就不细说了。
这个思路的计算量比较大!
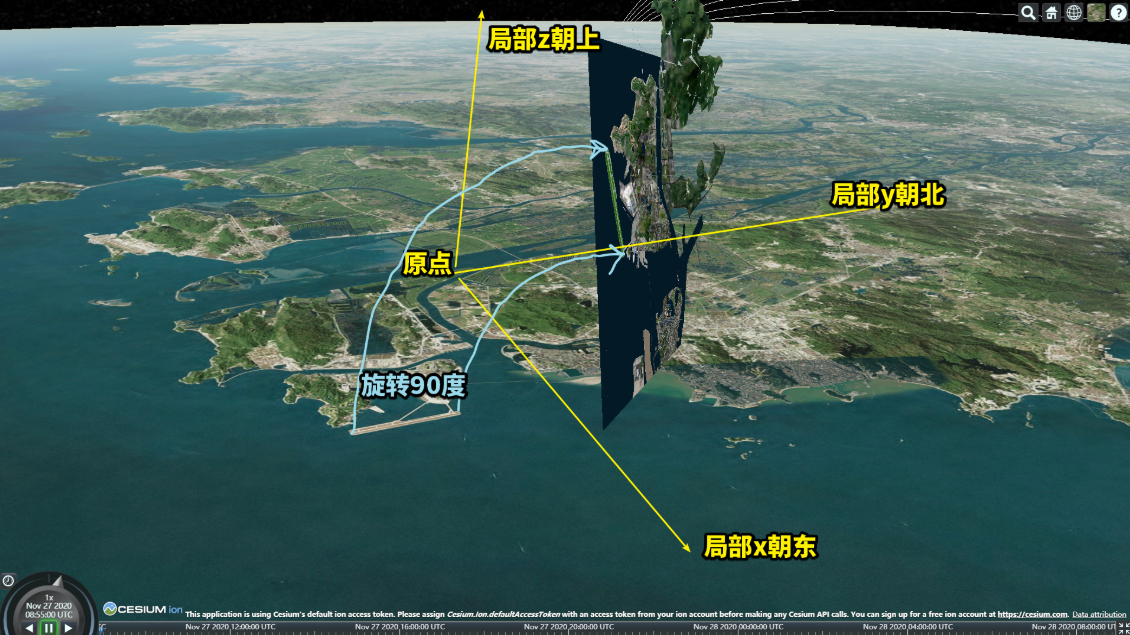
效果图(绕模型本身x轴转90度)
代码
tileset
.readyPromise
.then(tileset => {
const tileset_center = tileset.boundingSphere.center; // Cartesian3
//console.log(tileset_center);
const backto_matrix = Cesium.Matrix4.fromTranslation(tileset_center);
const moveto_vec = Cesium.Cartesian3.multiplyByScalar(tileset_center, -1, new Cesium.Cartesian3());
//console.log(moveto_vec);
const moveto_matrix = Cesium.Matrix4.fromTranslation(moveto_vec);
/* 绕x(即东方轴)转90度 */
const cos_rotateX = Math.cos(Math.PI/2);
const sin_rotateX = Math.sin(Math.PI/2);
const arr = [1,0,0,0, 0, cos_rotateX, sin_rotateX,0, 0,-sin_rotateX,cos_rotateX,0, 0,0,0,1];
const rotateX_matrix = Cesium.Matrix4.fromArray(arr);
/* 计算最终矩阵 */
const temp = Cesium.Matrix4.multiply(rotateX_matrix, moveto_matrix, new Cesium.Matrix4());
const r = Cesium.Matrix4.multiply(backto_matrix, temp, new Cesium.Matrix4());
tileset.modelMatrix = r; // 构造平移矩阵并赋值
viewer.zoomTo(tileset);
});
可以看到会产生非常多中间变量,会引发 JS 的GC,而且矩阵计算本身也比较复杂。
缩放思路
缩放思路和旋转类似,先移动到世界坐标系中心,缩放,然后再移动到原来的地方
tileset.modelMatrix (= M_{backToOrigin}·M_{localScale}·M_{moveToWorldCenter})
读者可自行实现。
注
思路不一定是最佳算法,有更高性能的算法可在评论区指出。