0.前言
redis是KV型的内存数据库, 数据库存储的核心就是Hash表, 我们执行select命令选择一个存储的db之后, 所有的操作都是以hash表为基础的, 下面会分析下redis的hash数据结构和实现.
1.hash数据结构
/*Hash表一个节点包含Key,Value数据对 */
typedef struct dictEntry {
void *key;
union {
void *val;
uint64_t u64;
int64_t s64;
double d;
} v;
struct dictEntry *next; /* 指向下一个节点, 链接表的方式解决Hash冲突 */
} dictEntry;
/* 存储不同数据类型对应不同操作的回调函数 */
typedef struct dictType {
unsigned int (*hashFunction)(const void *key);
void *(*keyDup)(void *privdata, const void *key);
void *(*valDup)(void *privdata, const void *obj);
int (*keyCompare)(void *privdata, const void *key1, const void *key2);
void (*keyDestructor)(void *privdata, void *key);
void (*valDestructor)(void *privdata, void *obj);
} dictType;
typedef struct dictht {
dictEntry **table; /* dictEntry*数组,Hash表 */
unsigned long size; /* Hash表总大小 */
unsigned long sizemask; /* 计算在table中索引的掩码, 值是size-1 */
unsigned long used; /* Hash表已使用的大小 */
} dictht;
typedef struct dict {
dictType *type;
void *privdata;
dictht ht[2]; /* 两个hash表,rehash时使用*/
long rehashidx; /* rehash的索引, -1表示没有进行rehash */
int iterators; /* */
} dict;
2.hash数据结构图
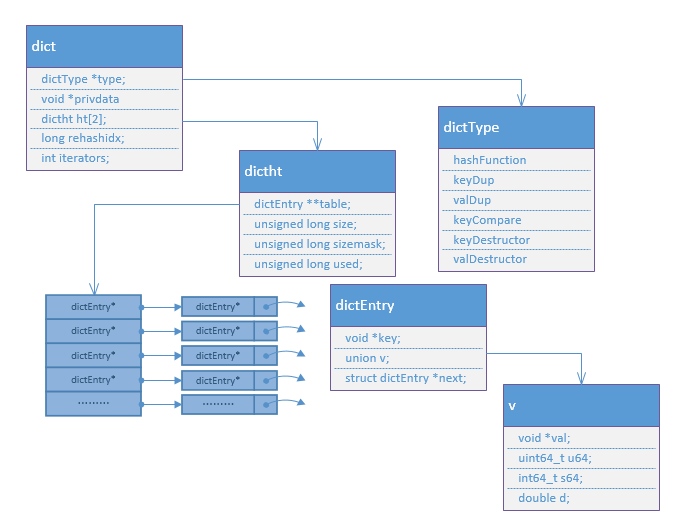
3.渐进式hash说明
dict中ht[2]中有两个hash表, 我们第一次存储数据的数据时, ht[0]会创建一个最小为4的hash表, 一旦ht[0]中的size和used相等, 则dict中会在ht[1]创建一个size*2大小的hash表, 此时并不会直接将ht[0]中的数据copy进ht[0]中, 执行的是渐进式rehash, 即在以后的操作(find, set, get等)中慢慢的copy进去, 以后新添加的元素会添加进ht[0], 因此在ht[1]被占满的时候定能确保ht[0]中所有的数据全部copy到ht[1]中.
4.创建hash表
创建hash表过程非常简单,直接调用dictCreate函数, 分配一块内存,初始化中间变量即可.
dict *dictCreate(dictType *type, void *privDataPtr)
{
/*分配内存*/
dict *d = zmalloc(sizeof(*d));
/*初始化操作*/
_dictInit(d,type,privDataPtr);
return d;
}
5.添加元素
hash表中添加元素,首先判断空间是否足够, 然后计算key对应的hash值, 然后将需要添加的key和value放入表中.
int dictAdd(dict *d, void *key, void *val)
{
/*添加入hash表中, 返回新添加元素的实体结构体*/
dictEntry *entry = dictAddRaw(d,key);
if (!entry) return DICT_ERR;
/*元素val值放入元素实体结构中*/
dictSetVal(d, entry, val);
return DICT_OK;
}
/*
*添加元素实体函数
*/
dictEntry *dictAddRaw(dict *d, void *key)
{
int index;
dictEntry *entry;
dictht *ht;
if (dictIsRehashing(d)) _dictRehashStep(d);
/*根据key值计算新元素在hash表中的索引, 返回-1则表示元素已存在, 直接返回NULL*/
if ((index = _dictKeyIndex(d, key)) == -1)
return NULL;
/*如果在进行rehash过程,则新元素添加到ht[1]中, 否则添加到ht[0]中 */
ht = dictIsRehashing(d) ? &d->ht[1] : &d->ht[0];
entry = zmalloc(sizeof(*entry));
entry->next = ht->table[index];
ht->table[index] = entry;
ht->used++;
/*设置元素key*/
dictSetKey(d, entry, key);
return entry;
}
/*
*计算索引的函数
*/
static int _dictKeyIndex(dict *d, const void *key)
{
unsigned int h, idx, table;
dictEntry *he;
/* 判断hash表是否空间足够, 不足则需要扩展 */
if (_dictExpandIfNeeded(d) == DICT_ERR)
return -1;
/* 计算key对应的hash值 */
h = dictHashKey(d, key);
for (table = 0; table <= 1; table++) {
/*计算索引*/
idx = h & d->ht[table].sizemask;
/*遍历冲突列表, 判断需要查找的key是否已经在冲突列表中*/
he = d->ht[table].table[idx];
while(he) {
if (dictCompareKeys(d, key, he->key))
return -1;
he = he->next;
}
if (!dictIsRehashing(d)) break;
}
return idx;
}
/*
*判断hash表是否需要扩展空间
*/
static int _dictExpandIfNeeded(dict *d)
{
/*redis的rehash采用的渐进式hash, rehash时分配了原来两倍的内存空间, 在rehash阶段空间必定够用*/
if (dictIsRehashing(d)) return DICT_OK;
/* hash表是空的需要初始化空间, 默认是4*/
if (d->ht[0].size == 0) return dictExpand(d, DICT_HT_INITIAL_SIZE);
/* 已使用空间满足不了设置的条件*/
if (d->ht[0].used >= d->ht[0].size &&
(dict_can_resize ||
d->ht[0].used/d->ht[0].size > dict_force_resize_ratio))
{
/*扩展空间, 使用空间的两倍*/
return dictExpand(d, d->ht[0].used*2);
}
return DICT_OK;
}
/*
*扩展空间或者初始化hash表空间
*/
int dictExpand(dict *d, unsigned long size)
{
dictht n;
/* 对需要分配大小圆整为2的倍数 */
unsigned long realsize = _dictNextPower(size);
/* 如果空间足够则表明调用错误 */
if (dictIsRehashing(d) || d->ht[0].used > size)
return DICT_ERR;
n.size = realsize;
n.sizemask = realsize-1;
n.table = zcalloc(realsize*sizeof(dictEntry*));
n.used = 0;
/*hash表为空初始化hash表*/
if (d->ht[0].table == NULL) {
d->ht[0] = n;
return DICT_OK;
}
/*新分配的空间放入ht[1], 后面一步一步进行rehash*/
d->ht[1] = n;
d->rehashidx = 0;
return DICT_OK;
}
6.查找元素
查找元素过程,首先计算hash值, 然后计算在ht[0]和ht[1]中索引位置, 进行查找.
dictEntry *dictFind(dict *d, const void *key)
{
dictEntry *he;
unsigned int h, idx, table;
if (d->ht[0].size == 0) return NULL;
/*如果正在进行rehash, 执行一次rehash*/
if (dictIsRehashing(d)) _dictRehashStep(d);
h = dictHashKey(d, key);
/*由于可能正在rehash, 因此要从ht[0]和ht[1]中分别进行查找, 找不到返回NULL*/
for (table = 0; table <= 1; table++) {
idx = h & d->ht[table].sizemask;
he = d->ht[table].table[idx];
/*遍历冲突列表查找元素*/
while(he) {
if (dictCompareKeys(d, key, he->key))
return he;
he = he->next;
}
if (!dictIsRehashing(d)) return NULL;
}
return NULL;
}
7.删除元素
删除元素首先查找元素, 然后将元素从hash表中移除即可, 调用dictDelete删除元素, 会同时删除元素所占空间
int dictDelete(dict *ht, const void *key) {
return dictGenericDelete(ht,key,0);
}
static int dictGenericDelete(dict *d, const void *key, int nofree)
{
unsigned int h, idx;
dictEntry *he, *prevHe;
int table;
if (d->ht[0].size == 0) return DICT_ERR;
if (dictIsRehashing(d)) _dictRehashStep(d);
h = dictHashKey(d, key);
for (table = 0; table <= 1; table++) {
idx = h & d->ht[table].sizemask;
he = d->ht[table].table[idx];
prevHe = NULL;
/*查找元素到元素,进行删除操作, 并释放占用的内存*/
while(he) {
if (dictCompareKeys(d, key, he->key)) {
/* Unlink the element from the list */
if (prevHe)
prevHe->next = he->next;
else
d->ht[table].table[idx] = he->next;
if (!nofree) {
dictFreeKey(d, he);
dictFreeVal(d, he);
}
zfree(he);
d->ht[table].used--;
return DICT_OK;
}
prevHe = he;
he = he->next;
}
if (!dictIsRehashing(d)) break;
}
return DICT_ERR; /* not found */
}
hash命令
hash命令操作都比较简单,需要注意的是当我们创建hash表示默认存储结构,并不是dict,而是ziplist结构,可以参考redis之Ziplist数据结构,hash_max_ziplist_entries和hash_max_ziplist_value值作为阀值,hash_max_ziplist_entries表示一旦ziplist中元素数量超过该值,则需要转换为dict结构;hash_max_ziplist_value表示一旦ziplist中数据长度大于该值,则需要转换为dict结构。