<结构体>
struct input_dev {
const char *name;
const char *phys;
const char *uniq;
struct input_id id;
//位表
unsigned long evbit[BITS_TO_LONGS(EV_CNT)]; //表示能够产生哪种类型的数据:EV_KEY,EV_ABS
unsigned long keybit[BITS_TO_LONGS(KEY_CNT)]; //表示能够产生哪些按键数据
unsigned long relbit[BITS_TO_LONGS(REL_CNT)]; //表示能够产生哪些相对坐标数据
unsigned long absbit[BITS_TO_LONGS(ABS_CNT)]; //表示能够产生哪些绝对坐标数据
unsigned long mscbit[BITS_TO_LONGS(MSC_CNT)];
unsigned long ledbit[BITS_TO_LONGS(LED_CNT)];
unsigned long sndbit[BITS_TO_LONGS(SND_CNT)];
unsigned long ffbit[BITS_TO_LONGS(FF_CNT)];
unsigned long swbit[BITS_TO_LONGS(SW_CNT)];
struct device dev; //父类
struct list_head h_list;
struct list_head node; //链表的节点
};
struct input_event { //上报给用户的输入设备的数据包的类型
struct timeval time; //时间戳
__u16 type; //读到的数据类型:EV_KEY,EV_ABS,EV_REL
__u16 code; //编码值
__s32 value; //状态
};
<笔记>
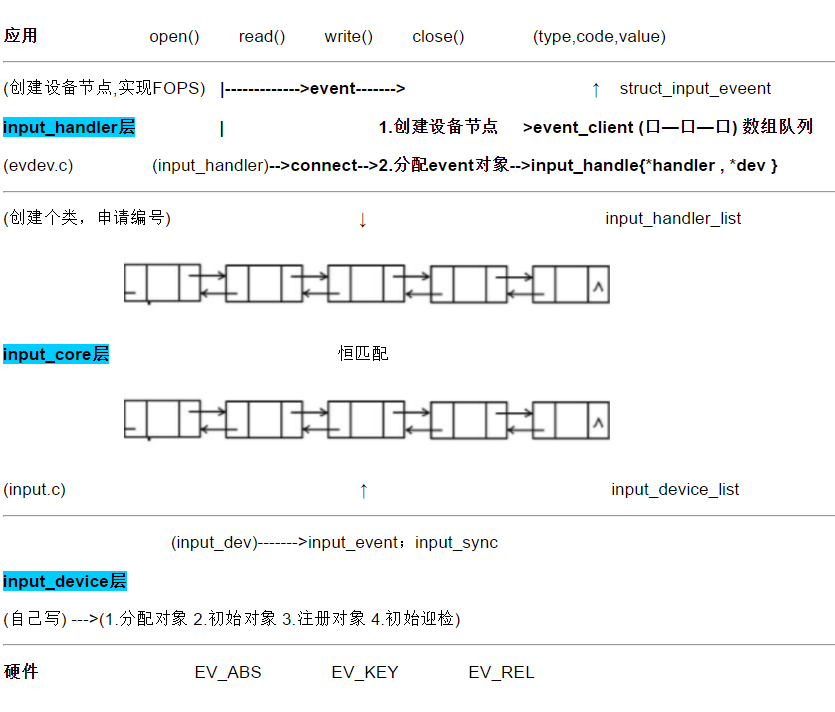
1.input handler 用户交互,不知数据,只知上传
2.input_core 维护了两个链表,为上下层提供接口,他不是总线!!
3.input device 硬件交互,知道数据,不知上传
4.编程:
1,分配一个 input device对象
2,初始化input device对象
3,注册input device对象
4,硬件初始化,获取到硬件的数据,上报给input handler
5.代码:
key:https://www.cnblogs.com/panda-w/p/10943249.html
ts :https://www.cnblogs.com/panda-w/p/10949993.html
6.input_core层也实现了一个fops,但只实现了open,就回到了input_handler层,所以他第一个打开
7.一个设备对应一个connect方法,对应一个设备节点,对应一个event对象,对应一个input_handle,对应一个event_client缓冲队列,所以数据上报不会混乱
8.应用程序会根据设备号找到对应的缓冲队列
9. getevent -l :type、code、value以对应的常量名称显示