
入坑SLAM,前段时间在做相机标定,最近又用到了卡尔曼滤波器,不查不知道,原来这个玩意这么厉害,火箭都是靠它上天的!
阿波罗登月是"划着洗衣盆飘过大西洋",那么这套估计理论大概就相当于洗衣盆上的那个舵手了。现在在航天领域,卡尔曼滤波是一种殿堂级的理论。
我没有学过控制类相关课程,临时抱佛脚学习一下。当然也仅限于最基本原理。
卡尔曼滤波器用来做什么?
简单来说,卡尔曼滤波器是用来得到对状态真实值的最优估计。
一个经典的例子是一台汽车在行进时,有多种方式获取行驶过的距离。可以通过当前速度等参数计算得到(这个不一定准确,因为会打滑,测量也有误差);也可以通过激光雷达定位得到,这个也有误差;也可以通过计算机视觉SFM得到,也有误差。
虽然都有误差,但是这么多数据综合起来也许可能得到不错的结果吧。
综合计算和测量数值得到最优结果的方法,卡尔曼!
卡尔曼滤波器内容
前提条件前提是 小车的速度和位置量在其定义域内具有正态的高斯分布规律
还是以汽车行驶为例进行说明。
直观看对于行驶来说,关心的是距离,速度(毕竟对于车盲来说,其他也不知道了)。
我们的观察量是(X = [p, v]) 其中(p)是行驶距离,(v)是速度。
我们的问题是获取准确的观察量X
估计量计算
那么位移和速度之间有没有关系?
多少有点嘛,速度大,位移也可能会大,这个在不同情况下具体的相关度不一样。那么我们用协方差矩阵来衡量相关度。这个矩阵记为 (P)
至此,如果我们直接计算下一阶段的距离,加速度为(a)距离(p_k)为
(p_k = p_{k-1} + delta tv_{k-1} + frac{1}{2}adelta t^2)
(v_k = v_{k-1} + adelta t)
(u) 是控制量,(B_k)是控制矩阵,(w_k)是不确定干扰项
写成矩阵形式如下
协方差更新方程
这个根据协方差公式推导一下即可,(Q_k)是误差
至此已经得到了估计量的计算方程.
先验估计(hat{x}_k)取决于如下三部分:一部分是上一次的最优估计值(也就是上一轮卡尔曼滤波的结果),一部分是确定性的外界影响值,另一部分是环境当中不确定的干扰。
先验估计协方差矩阵(P_k),首先是依据第(k-1)次卡尔曼估计(后验估计)的协方差矩阵进行递推,再与外界在这次更新中可能对系统造成的不确定的影响求和得到。
你需要休息一下
观察量计算
人们总是不能够完全信任自身的经验,也需要另外的一条途径来纠正潜在发生的错误或者是误差。
所以,我们很自然的想到在车身安装各类的传感器,比如速度传感器、位移传感器等等,以这些传感器的反馈作为纠正我们推断的依据。
传感器的输出值不一定就是我们创建的状态向量当中的元素,有时候需要进行一下简单的换算。即使是,有可能单位也不对应,所以,需要一个转换。这个转换就是矩阵(H_k),在一些文献当中也被称作状态空间到观测空间的映射矩阵。
举个例子,比如汽车上的雷达测距,只能测量得到距离,不能得到速度的估计。这样就要依靠(H)矩阵来将这个转换.观测噪声的协方差矩阵(R)表示。如果多种测量仪器综合使用,z在这里就是矩阵,每一行代表一种仪器的测量结果。
(overrightarrow z_t=H_khat x_k+overrightarrow v_k)
观测向量(overrightarrow {z_k}),服从高斯分布并且其平均值认为就是本次的量测值((z_1,z_2))。
通过空间映射矩阵,依据我们先验估计值,在量测空间当中,传感器的测量值理想情况下应该是这样的:
(overrightarrow mu_{expected}=H_khat x_k)
(Sigma_{expected}=H_kP_kH_k^T)
但是,传感器对系统某些状态的测量也会有偏差。系统在某一个状态下,会推断出一组理想值,在另一个状态下,会有另外一组理想值,而对应时刻传感器的测量值一定是无法和理想值保持完全吻合的。由于测量噪声的存在,不同的系统状态下,测量具有一定误差,呈现高斯分布.
但是这个高斯分布的最中心还是当前的测量值。所以,还需要一个观测噪声向量以及观测噪声协方差来衡量测量水平,我们将它们分别命名为(v_k)和(R_k)
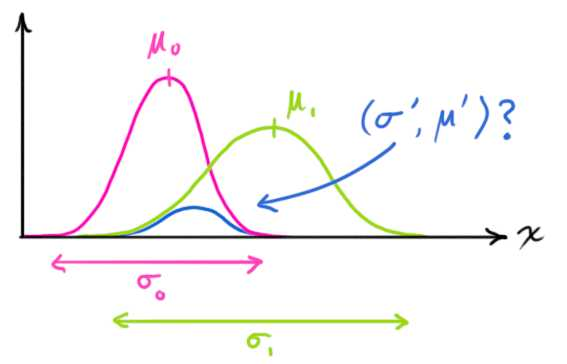
同时,我们也知道对于估计值和测量值两个分布他们重叠的部分,可能性更大
步骤
x是要得到的状态量,F是状态转移矩阵,P是观察量的协方差矩阵,B是控制矩阵,u是控制向量。Q是噪声协方差
H是转换矩阵,R是观测噪声协方差,K是卡尔曼增益
预测
(hat{x}^-_t = Fhat{x}_{t-1} + Bu_{t-1})
(hat{P}^-_t = Fhat{P}_{t-1}F^T + Q)
更新
(K_t = hat{P}^-_tH^T(HP^-_tH^T(HP^-_tH^T + R)^{-1})
(hat{x}_t = hat{x}^-_t + K_t(z_t - Hhat{x}^-_t))
(P_t = (I - K_tH)P^-_t)
所以发现卡尔曼程序只需要刚开始随机设置x,p(随即值不影响结果,几次迭代后就收敛了),H,A,B都是事先设定的