1、原理
所谓的图片的膨胀处理,其实就是在图像的边缘添加像素值,使得整体的像素值扩张,进而达到图像的膨胀效果,也可以说是信号与系统书中所提到的像素插值处理。
对Z2上元素集合A和结构体元素S,使用S对A进行腐蚀,记作:
A⊕S={z|(S)z ∩ A ≠ Ø}
让位于图像圆点的结构元素S在Z平面上移动,如果S的圆点移动到z点时,S与A有公共的交集(非空集),则认为这样的z点构成的集合是S对A的膨胀图像。
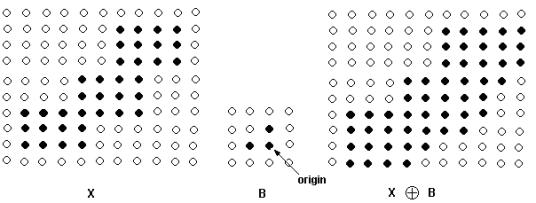
下图左侧是原图X,B是结构元素,右图是膨胀的结果。膨胀的方法是,拿B的中心点和X上的点一个一个地对比,如果B上至少有一个点在X的范围内,则该点为前景有效点;右边是膨胀后的结果。可以看出,膨胀后的图比原图点数多,就象X被膨胀增加了一层。
2、膨胀的实现
imgPath = 'E:opencv_picsrc_picpic1.bmp'; img = imread(imgPath); img=rgb2gray(img); img = 255-img; se = strel('square', 3) img2 = imdilate(img, se); subplot(1,2,1),imshow(img),title('原始图像'); subplot(1,2,2),imshow(img2),title('膨胀图像');
膨胀后结果如下图。

放大后观察,左侧的噪点,第一列最下面一个是2*2的块,膨胀后变为4*4块。

如果使用5*5和10*10的结构元素,膨胀效果如下。
se = strel('square', 5) img2 = imdilate(img, se); subplot(1,3,1),imshow(img),title('原始图像'); subplot(1,3,2),imshow(img2),title('膨胀图像系数5'); se3 = strel('square', 10) img3 = imdilate(img, se3); subplot(1,3,3),imshow(img3),title('膨胀图像系数10');
膨胀使物体的边界扩大,可能把多个元素连同起来。腐蚀后可以删除对象边界的某些像素,而膨胀给图像中的对象边界添加像素。腐蚀使图像变“细”,膨胀是图像变“粗”。

先腐蚀后再膨胀可以用在图像滤波,腐蚀后图像变细,去除了比较小的噪声,膨胀后恢复原图像。
imgPath = 'E:opencv_picsrc_picpic1.bmp'; img = imread(imgPath); img=rgb2gray(img); img = 255-img; se = strel('square', 5) img2 = imerode(img, se); img3 = imdilate(img2, se); subplot(1,3,1),imshow(img),title('原始图像'); subplot(1,3,2),imshow(img2),title('腐蚀图像'); subplot(1,3,3),imshow(img3),title('膨胀图像');
图像效果如下图。

3、总结
和腐蚀相反,膨胀能使物体的边界扩大,具体的结果和图像的本身、结构元素的形状有关。一般的,二值化后图像容易出现断裂,膨胀可以桥接断裂的缝隙。
腐蚀和膨胀对比:
膨胀用3X3的结构元素,扫描二值图像的每一个像素,用结构元素与其覆盖的二值图像做“与”运算,如果都为0,结构图像的该像素为0,否则为1。只要有一个元素非零结果就非零,所以使二值图像扩大一圈。
腐蚀用3X3的结构元素,扫描二值图像的每一个像素,用结构元素与其覆盖的二值图像做“与”运算,如果都为1,结构图像的该像素为1,否则为0。只要全部元素都为1结果才为1,所以使二值图像减小一圈。
尊重原创技术文章,转载请注明。