1. 环境搭建
- 将github库download下来。
git clone https://github.com/ultralytics/yolov3.git
- 建议在linux环境下使用anaconda进行搭建
conda create -n yolov3 python=3.7
- 安装需要的软件
pip install -r requirements.txt
环境要求:
- python >= 3.7
- pytorch >= 1.1
- numpy
- tqdm
- opencv-python
其中只需要注意pytorch的安装:
到https://pytorch.org/中根据操作系统,python版本,cuda版本等选择命令即可。
关于深度学习环境搭建请参看:https://www.cnblogs.com/pprp/p/9463974.html
anaconda常用用法:https://www.cnblogs.com/pprp/p/9463124.html
2. 数据集构建
1. xml文件生成需要Labelimg软件
在Windows下使用LabelImg软件进行标注,能在网上下载,或者通过github搜索得到。
- 使用快捷键:
Ctrl + u 加载目录中的所有图像,鼠标点击Open dir同功能
Ctrl + r 更改默认注释目标目录(xml文件保存的地址)
Ctrl + s 保存
Ctrl + d 复制当前标签和矩形框
space 将当前图像标记为已验证
w 创建一个矩形框
d 下一张图片
a 上一张图片
del 删除选定的矩形框
Ctrl++ 放大
Ctrl-- 缩小
↑→↓← 键盘箭头移动选定的矩形框
2. VOC2007 数据集格式
-data
- VOCdevkit2007
- VOC2007
- Annotations (标签XML文件,用对应的图片处理工具人工生成的)
- ImageSets (生成的方法是用sh或者MATLAB语言生成)
- Main
- test.txt
- train.txt
- trainval.txt
- val.txt
- JPEGImages(原始文件)
- labels (xml文件对应的txt文件)
通过以上软件主要构造好JPEGImages和Annotations文件夹中内容,Main文件夹中的txt文件可以通过python脚本生成:
import os
import random
trainval_percent = 0.8
train_percent = 0.8
xmlfilepath = 'Annotations'
txtsavepath = 'ImageSetsMain'
total_xml = os.listdir(xmlfilepath)
num=len(total_xml)
list=range(num)
tv=int(num*trainval_percent)
tr=int(tv*train_percent)
trainval= random.sample(list,tv)
train=random.sample(trainval,tr)
ftrainval = open('ImageSets/Main/trainval.txt', 'w')
ftest = open('ImageSets/Main/test.txt', 'w')
ftrain = open('ImageSets/Main/train.txt', 'w')
fval = open('ImageSets/Main/val.txt', 'w')
for i in list:
name=total_xml[i][:-4]+'
'
if i in trainval:
ftrainval.write(name)
if i in train:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
生成labels文件,voc_label.py文件具体内容如下:
# -*- coding: utf-8 -*-
"""
Created on Tue Oct 2 11:42:13 2018
将本文件放到VOC2007目录下,然后就可以直接运行
需要修改的地方:
1. sets中替换为自己的数据集
2. classes中替换为自己的类别
3. 将本文件放到VOC2007目录下
4. 直接开始运行
"""
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
sets=[('2007', 'train'), ('2007', 'val'), ('2007', 'test')] #替换为自己的数据集
classes = ["head", "eye", "nose"] #修改为自己的类别
#classes = ["eye", "nose"]
def convert(size, box):
dw = 1./(size[0])
dh = 1./(size[1])
x = (box[0] + box[1])/2.0 - 1
y = (box[2] + box[3])/2.0 - 1
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(year, image_id):
in_file = open('VOC%s/Annotations/%s.xml'%(year, image_id)) #将数据集放于当前目录下
out_file = open('VOC%s/labels/%s.txt'%(year, image_id), 'w')
tree=ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult)==1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '
')
wd = getcwd()
for year, image_set in sets:
if not os.path.exists('VOC%s/labels/'%(year)):
os.makedirs('VOC%s/labels/'%(year))
image_ids = open('VOC%s/ImageSets/Main/%s.txt'%(year, image_set)).read().strip().split()
list_file = open('%s_%s.txt'%(year, image_set), 'w')
for image_id in image_ids:
list_file.write('VOC%s/JPEGImages/%s.jpg
'%(year, image_id))
convert_annotation(year, image_id)
list_file.close()
#os.system("cat 2007_train.txt 2007_val.txt > train.txt") #修改为自己的数据集用作训练
到底为止,VOC格式数据集构造完毕,但是还需要继续构造符合darknet格式的数据集(coco)。
需要说明的是:如果打算使用coco评价标准,需要构造coco中json格式,如果要求不高,只需要VOC格式即可,使用作者写的mAP计算程序即可。
voc的xml转coco的json文件脚本:xml2json.py
# -*- coding: utf-8 -*-
"""
Created on Tue Aug 28 15:01:03 2018
需要改动xml_path and json_path
"""
#!/usr/bin/python
# -*- coding:utf-8 -*-
# @Description: xml转换到coco数据集json格式
import os, sys, json,xmltodict
from xml.etree.ElementTree import ElementTree, Element
from collections import OrderedDict
XML_PATH = "/home/learner/datasets/VOCdevkit2007/VOC2007/Annotations/test"
JSON_PATH = "./test.json"
json_obj = {}
images = []
annotations = []
categories = []
categories_list = []
annotation_id = 1
def read_xml(in_path):
'''读取并解析xml文件'''
tree = ElementTree()
tree.parse(in_path)
return tree
def if_match(node, kv_map):
'''判断某个节点是否包含所有传入参数属性
node: 节点
kv_map: 属性及属性值组成的map'''
for key in kv_map:
if node.get(key) != kv_map.get(key):
return False
return True
def get_node_by_keyvalue(nodelist, kv_map):
'''根据属性及属性值定位符合的节点,返回节点
nodelist: 节点列表
kv_map: 匹配属性及属性值map'''
result_nodes = []
for node in nodelist:
if if_match(node, kv_map):
result_nodes.append(node)
return result_nodes
def find_nodes(tree, path):
'''查找某个路径匹配的所有节点
tree: xml树
path: 节点路径'''
return tree.findall(path)
print ("-----------------Start------------------")
xml_names = []
for xml in os.listdir(XML_PATH):
#os.path.splitext(xml)
#xml=xml.replace('Cow_','')
xml_names.append(xml)
'''xml_path_list=os.listdir(XML_PATH)
os.path.split
xml_path_list.sort(key=len)'''
xml_names.sort(key=lambda x:int(x[:-4]))
new_xml_names = []
for i in xml_names:
j = 'Cow_' + i
new_xml_names.append(j)
#print xml_names
#print new_xml_names
for xml in new_xml_names:
tree = read_xml(XML_PATH + "/" + xml)
object_nodes = get_node_by_keyvalue(find_nodes(tree, "object"), {})
if len(object_nodes) == 0:
print (xml, "no object")
continue
else:
image = OrderedDict()
file_name = os.path.splitext(xml)[0]; # 文件名
para1 = file_name + ".jpg"
height_nodes = get_node_by_keyvalue(find_nodes(tree, "size/height"), {})
para2 = int(height_nodes[0].text)
width_nodes = get_node_by_keyvalue(find_nodes(tree, "size/width"), {})
para3 = int(width_nodes[0].text)
fname=file_name[4:]
para4 = int(fname)
for f,i in [("file_name",para1),("height",para2),("width",para3),("id",para4)]:
image.setdefault(f,i)
#print(image)
images.append(image) #构建images
name_nodes = get_node_by_keyvalue(find_nodes(tree, "object/name"), {})
xmin_nodes = get_node_by_keyvalue(find_nodes(tree, "object/bndbox/xmin"), {})
ymin_nodes = get_node_by_keyvalue(find_nodes(tree, "object/bndbox/ymin"), {})
xmax_nodes = get_node_by_keyvalue(find_nodes(tree, "object/bndbox/xmax"), {})
ymax_nodes = get_node_by_keyvalue(find_nodes(tree, "object/bndbox/ymax"), {})
for index, node in enumerate(object_nodes):
annotation = {}
segmentation = []
bbox = []
seg_coordinate = [] #坐标
seg_coordinate.append(int(xmin_nodes[index].text))
seg_coordinate.append(int(ymin_nodes[index].text))
seg_coordinate.append(int(xmin_nodes[index].text))
seg_coordinate.append(int(ymax_nodes[index].text))
seg_coordinate.append(int(xmax_nodes[index].text))
seg_coordinate.append(int(ymax_nodes[index].text))
seg_coordinate.append(int(xmax_nodes[index].text))
seg_coordinate.append(int(ymin_nodes[index].text))
segmentation.append(seg_coordinate)
width = int(xmax_nodes[index].text) - int(xmin_nodes[index].text)
height = int(ymax_nodes[index].text) - int(ymin_nodes[index].text)
area = width * height
bbox.append(int(xmin_nodes[index].text))
bbox.append(int(ymin_nodes[index].text))
bbox.append(width)
bbox.append(height)
annotation["segmentation"] = segmentation
annotation["area"] = area
annotation["iscrowd"] = 0
fname=file_name[4:]
annotation["image_id"] = int(fname)
annotation["bbox"] = bbox
cate=name_nodes[index].text
if cate=='head':
category_id=1
elif cate=='eye':
category_id=2
elif cate=='nose':
category_id=3
annotation["category_id"] = category_id
annotation["id"] = annotation_id
annotation_id += 1
annotation["ignore"] = 0
annotations.append(annotation)
if category_id in categories_list:
pass
else:
categories_list.append(category_id)
categorie = {}
categorie["supercategory"] = "none"
categorie["id"] = category_id
categorie["name"] = name_nodes[index].text
categories.append(categorie)
json_obj["images"] = images
json_obj["type"] = "instances"
json_obj["annotations"] = annotations
json_obj["categories"] = categories
f = open(JSON_PATH, "w")
#json.dump(json_obj, f)
json_str = json.dumps(json_obj)
f.write(json_str)
print ("------------------End-------------------")
(运行bash yolov3/data/get_coco_dataset.sh,仿照格式将数据放到其中)
但是这个库还需要其他模型:
3. 创建*.names file,
其中保存的是你的所有的类别,每行一个类别,如data/coco.names:
head
eye
nose
4. 更新data/coco.data,其中保存的是很多配置信息
classes = 3 # 改成你的数据集的类别个数
train = ./data/2007_train.txt # 通过voc_label.py文件生成的txt文件
valid = ./data/2007_test.txt # 通过voc_label.py文件生成的txt文件
names = data/coco.names # 记录类别
backup = backup/ # 记录checkpoint存放位置
eval = coco # 选择map计算方式
5. 更新cfg文件,修改类别相关信息
打开cfg文件夹下的yolov3.cfg文件,大体而言,cfg文件记录的是整个网络的结构,是核心部分,具体内容讲解请见:https://pprp.github.io/2018/09/20/tricks.html
只需要更改每个[yolo]层前边卷积层的filter个数即可:
每一个[region/yolo]层前的最后一个卷积层中的 filters=预测框的个数(mask对应的个数,比如mask=0,1,2, 代表使用了anchors中的前三对,这里预测框个数就应该是3*(classes+5) ,5的意义是4个坐标+1个置信度代表这个格子含有目标的概率,也就是论文中的tx,ty,tw,th,po
举个例子:我有三个类,n = 3, 那么filter = 3x(n+5) = 24
[convolutional]
size=1
stride=1
pad=1
filters=255 # 改为 24
activation=linear
[yolo]
mask = 6,7,8
anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
classes=80 # 改为 3
num=9
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
6. 数据集格式说明
- yolov3
- data
- 2007_train.txt
- 2007_test.txt
- coco.names
- coco.data
- annotations(json files)
- images(将2007_train.txt中的图片放到train2014文件夹中,test同理)
- train2014
- 0001.jpg
- 0002.jpg
- val2014
- 0003.jpg
- 0004.jpg
- labels(voc_labels.py生成的内容需要重新组织一下)
- train2014
- 0001.txt
- 0002.txt
- val2014
- 0003.txt
- 0004.txt
- samples(存放待测试图片)
2007_train.txt内容示例:
/home/dpj/yolov3-master/data/images/val2014/Cow_1192.jpg
/home/dpj/yolov3-master/data/images/val2014/Cow_1196.jpg
.....
注意images和labels文件架构一致性,因为txt是通过简单的替换得到的:
images -> labels
.jpg -> .txt
3. 训练模型
预训练模型:
- Darknet
*.weightsformat: https://pjreddie.com/media/files/yolov3.weights - PyTorch
*.ptformat: https://drive.google.com/drive/folders/1uxgUBemJVw9wZsdpboYbzUN4bcRhsuAI
开始训练:
python train.py --data data/coco.data --cfg cfg/yolov3.cfg
如果日志正常输出那证明可以运行了
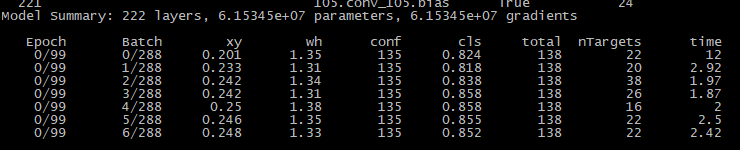
如果中断了,可以恢复训练
python train.py --data data/coco.data --cfg cfg/yolov3.cfg --resume
4. 测试模型
将待测试图片放到data/samples中,然后运行
python detect.py --weights weights/best.pt
5. 评估模型
python test.py --weights weights/latest.pt
如果使用cocoAPI使用以下命令:
git clone https://github.com/cocodataset/cocoapi && cd cocoapi/PythonAPI && make && cd ../.. && cp -r cocoapi/PythonAPI/pycocotools yolov3
cd yolov3
python3 test.py --save-json --img-size 416
Namespace(batch_size=32, cfg='cfg/yolov3-spp.cfg', conf_thres=0.001, data_cfg='data/coco.data', img_size=416, iou_thres=0.5, nms_thres=0.5, save_json=True, weights='weights/yolov3-spp.weights')
Using CUDA device0 _CudaDeviceProperties(name='Tesla V100-SXM2-16GB', total_memory=16130MB)
Class Images Targets P R mAP F1
Calculating mAP: 100%|█████████████████████████████████████████| 157/157 [05:59<00:00, 1.71s/it]
all 5e+03 3.58e+04 0.109 0.773 0.57 0.186
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.335
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.565
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.349
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.151
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.360
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.493
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.280
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.432
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.458
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.255
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.494
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.620
python3 test.py --save-json --img-size 608 --batch-size 16
Namespace(batch_size=16, cfg='cfg/yolov3-spp.cfg', conf_thres=0.001, data_cfg='data/coco.data', img_size=608, iou_thres=0.5, nms_thres=0.5, save_json=True, weights='weights/yolov3-spp.weights')
Using CUDA device0 _CudaDeviceProperties(name='Tesla V100-SXM2-16GB', total_memory=16130MB)
Class Images Targets P R mAP F1
Computing mAP: 100%|█████████████████████████████████████████| 313/313 [06:11<00:00, 1.01it/s]
all 5e+03 3.58e+04 0.12 0.81 0.611 0.203
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.366
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.607
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.386
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.207
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.391
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.485
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.296
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.464
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.494
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.331
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.517
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.618
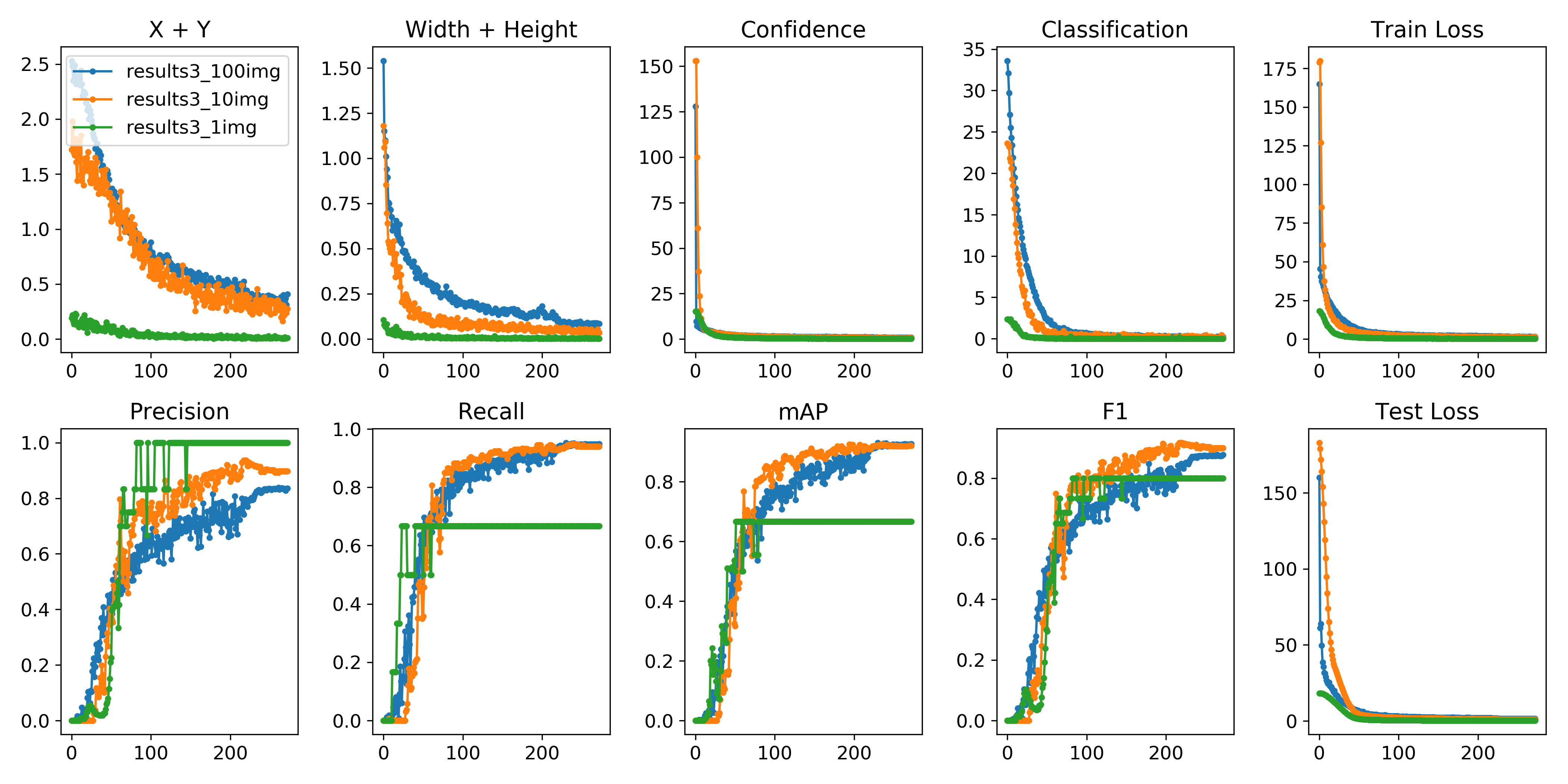
6. 可视化
可以使用python -c from utils import utils;utils.plot_results()
创建drawLog.py
def plot_results():
# Plot YOLO training results file 'results.txt'
import glob
import numpy as np
import matplotlib.pyplot as plt
#import os; os.system('rm -rf results.txt && wget https://storage.googleapis.com/ultralytics/results_v1_0.txt')
plt.figure(figsize=(16, 8))
s = ['X', 'Y', 'Width', 'Height', 'Objectness', 'Classification', 'Total Loss', 'Precision', 'Recall', 'mAP']
files = sorted(glob.glob('results.txt'))
for f in files:
results = np.loadtxt(f, usecols=[2, 3, 4, 5, 6, 7, 8, 17, 18, 16]).T # column 16 is mAP
n = results.shape[1]
for i in range(10):
plt.subplot(2, 5, i + 1)
plt.plot(range(1, n), results[i, 1:], marker='.', label=f)
plt.title(s[i])
if i == 0:
plt.legend()
plt.savefig('./plot.png')
if __name__ == "__main__":
plot_results()
7. 高级进阶-网络结构更改
详细cfg文件讲解:https://pprp.github.io/2018/09/20/YOLO cfg文件解析/
参考资料以及网络更改经验:https://pprp.github.io/2019/06/20/YOLO经验总结/
欢迎在评论区进行讨论,也便于我继续完善该教程。
ps: 最近写了一个一键生成脚本,可以直接将VOC2007数据格式转换为U版yolov3要求的格式,地址在这里:https://github.com/pprp/voc2007_for_yolo_torch
ps: 如何添加注意力机制?https://www.cnblogs.com/pprp/p/12241054.html 这是《从零开始学习YOLOv3》系列教程的第7篇,剩余的可以关注GiantPandaCV公众号查看历史文章,或者直接翻阅笔者之前的历史文章。
YOLOv4出来了,点击这篇文章查看笔者总结的YOLOv4梳理。