GPIO
General Purpose I/O ,网上能找到很多关于znyq gpio 的文章。
分类:EMIO 、MIO 、AXI_GPIO
硬件系统
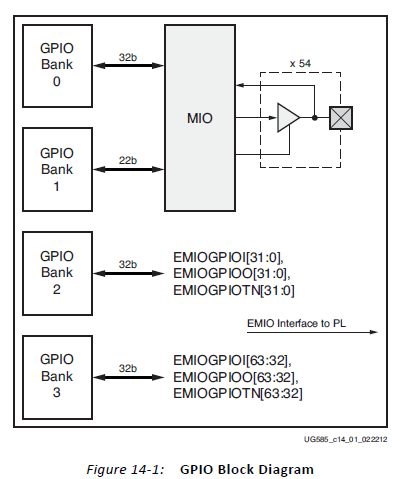
MIO和EMIO是在zynq核中配置的,MIO是固定的,EMIO是可选的使用PL的引脚。
AXI_GPIO是在PL端使用的GPIO,挂在znyq核的M_AXI_GP接口下使用。
需要zynq核,AXI_GPIO的使用PL端的模块,如AXI_GPIO
软件部分
SDK的库封装是多层次的,
可以使用高层次的
- xgpio.h 使用AXI_GPIO需要
- xgpiops.h 使用MIO和EMIO需要
或者是底层的
- xgpio_l.h
- xil_io.h
在高层次中模块被封装成结构体实例,使用时调用实例,初始化读写。
而低层次中就是直接对地址进行读写,如下:
//write XGpio_WriteReg(BaseAddress, RegOffset, Data) XGpio_Out32((BaseAddress) + (RegOffset), (u32)(Data)) //read XGpio_ReadReg(BaseAddress, RegOffset) XGpio_In32((BaseAddress) + (RegOffset))
或更底层的。
我更喜欢高级的读写方式,因为更多信息都在函数中表现出来了,下面是读写方式。
流程都是相似的:
- 定义Gpio或GpioPs结构体。
- 初始化配置。
- 设置读写方向、使能。
- 读写。GpioPs有Pin和Bank两种方式。
code:
//GPIO #define GPIO0_ADDR XPAR_AXI_GPIO_0_BASEADDR #define GPIO0_ID XPAR_AXI_GPIO_0_DEVICE_ID int main() { XGpio Gpio0; XGpioPs_Config *ConfigPtr; int Status; u32 value = 0xa; /* Initialize the GPIO driver */ Status = XGpio_Initialize(&Gpio0, GPIO0_ID); if (Status != XST_SUCCESS) { xil_printf("Gpio Initialization Failed "); return XST_FAILURE; } Status = XGpioPs_CfgInitialize(GpioPsPtr,ConfigPtr, ConfigPtr->BaseAddr); if (Status != XST_SUCCESS) { xil_printf("Cfg init err "); return XST_FAILURE; } /* Set the direction */ XGpio_SetDataDirection(&Gpio0, CHANNEL, 0x00000000);//output // XGpio_Out32((GPIO1_ADDR) + (0), (u32)(value)); // XGpio_WriteReg(GPIO_ADDR, 0, value); XGpio_DiscreteWrite(&Gpio0, CHANNEL, value); return 0; } //GPIOPS #define GpioPsDeviceId XPAR_PS7_GPIO_0_DEVICE_ID #define pin 0 int main() { XGpioPs GpioPs; XGpioPs_Config *ConfigPtr; int Status; int value = 1; /* Initialize the Gpio driver. */ ConfigPtr = XGpioPs_LookupConfig(GpioPsDeviceId); if (ConfigPtr == NULL) { xil_printf("ERROR "); return XST_FAILURE; } Status = XGpioPs_CfgInitialize(GpioPsPtr,ConfigPtr, ConfigPtr->BaseAddr); if (Status != XST_SUCCESS) { xil_printf("Cfg init err "); return XST_FAILURE; } //set pin direction //value 0 -> input 1 -> output XGpioPs_SetDirectionPin(GpioPsPtr, pin0, 1); //value 0 -> disable 1 -> enable XGpioPs_SetOutputEnablePin(GpioPsPtr, pin0, 1); //write XGpioPs_WritePin(&GpioPs, pin0, value); return 0; }
via :
ug585 CH14 General Purpose I/O
https://blog.csdn.net/husipeng86/article/details/52123465
https://blog.csdn.net/yc461515457/article/details/40954363
https://blog.csdn.net/xzyiverson/article/details/19934837
https://blog.csdn.net/luoqindong/article/details/43017773?utm_source=blogxgwz0