转载自:http://blog.csdn.net/pathuang68/article/details/6991867
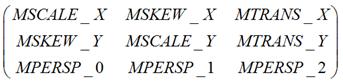
在Android中,如果你用Matrix进行过图像处理,那么一定知道Matrix这个类。Android中的Matrix是一个3 x 3的矩阵,其内容如下:
Matrix的对图像的处理可分为四类基本变换:
Translate 平移变换
Rotate 旋转变换
Scale 缩放变换
Skew 错切变换
从字面上理解,矩阵中的MSCALE用于处理缩放变换,MSKEW用于处理错切变换,MTRANS用于处理平移变换,MPERSP用于处理透视变换。实际中当然不能完全按照字面上的说法去理解Matrix。同时,在Android的文档中,未见到用Matrix进行透视变换的相关说明,所以本文也不讨论这方面的问题。
针对每种变换,Android提供了pre、set和post三种操作方式。其中
set用于设置Matrix中的值。
pre是先乘,因为矩阵的乘法不满足交换律,因此先乘、后乘必须要严格区分。先乘相当于矩阵运算中的右乘。
post是后乘,因为矩阵的乘法不满足交换律,因此先乘、后乘必须要严格区分。后乘相当于矩阵运算中的左乘。
除平移变换(Translate)外,旋转变换(Rotate)、缩放变换(Scale)和错切变换(Skew)都可以围绕一个中心点来进行,如果不指定,在默认情况下是围绕(0, 0)来进行相应的变换的。
下面我们来看看四种变换的具体情形。由于所有的图形都是有点组成,因此我们只需要考察一个点相关变换即可。
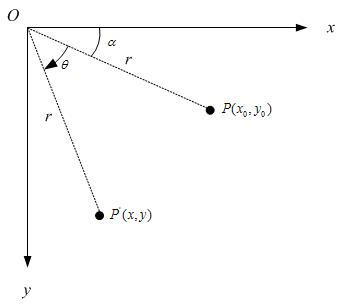
一、 平移变换
假定有一个点的坐标是 ,将其移动到
,将其移动到 ,再假定在x轴和y轴方向移动的大小分别为:
,再假定在x轴和y轴方向移动的大小分别为:

如下图所示:
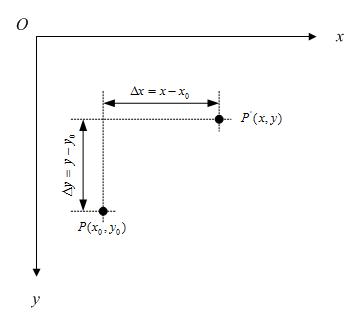
不难知道:

如果用矩阵来表示的话,就可以写成:
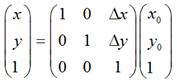
二、 旋转变换
2.1 围绕坐标原点旋转:
假定有一个点 ,相对坐标原点顺时针旋转 后的情形,同时假定P点离坐标原点的距离为r,如下图:
后的情形,同时假定P点离坐标原点的距离为r,如下图:
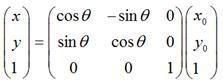
那么,
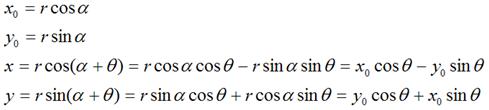
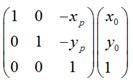
如果用矩阵,就可以表示为:
2.2 围绕某个点旋转
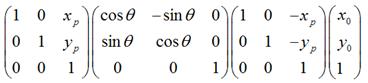
如果是围绕某个点 顺时针旋转,那么可以用矩阵表示为:
顺时针旋转,那么可以用矩阵表示为:
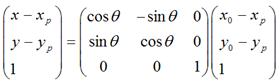
可以化为:
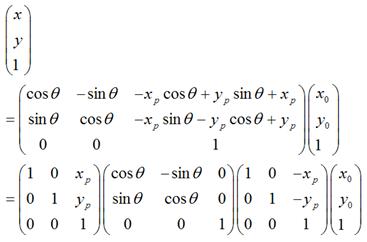
很显然,
1.
 是将坐标原点移动到点后, 的新坐标。
是将坐标原点移动到点后, 的新坐标。
2.
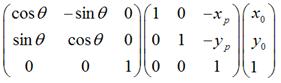
是将上一步变换后的,围绕新的坐标原点顺时针旋转 。
3.
经过上一步旋转变换后,再将坐标原点移回到原来的坐标原点。
所以,围绕某一点进行旋转变换,可以分成3个步骤,即首先将坐标原点移至该点,然后围绕新的坐标原点进行旋转变换,再然后将坐标原点移回到原先的坐标原点。
三、 缩放变换
理论上而言,一个点是不存在什么缩放变换的,但考虑到所有图像都是由点组成,因此,如果图像在x轴和y轴方向分别放大k1和k2倍的话,那么图像中的所有点的x坐标和y坐标均会分别放大k1和k2倍,即

用矩阵表示就是:

缩放变换比较好理解,就不多说了。
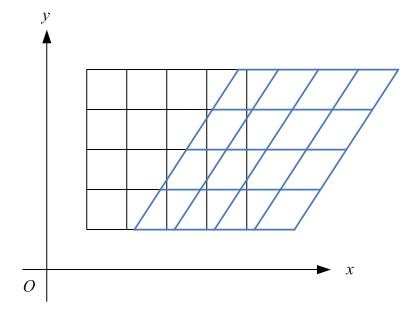
四、 错切变换
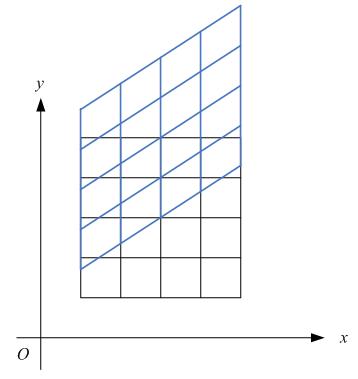
错切变换(skew)在数学上又称为Shear mapping(可译为“剪切变换”)或者Transvection(缩并),它是一种比较特殊的线性变换。错切变换的效果就是让所有点的x坐标(或者y坐标)保持不变,而对应的y坐标(或者x坐标)则按比例发生平移,且平移的大小和该点到x轴(或y轴)的垂直距离成正比。错切变换,属于等面积变换,即一个形状在错切变换的前后,其面积是相等的。
比如下图,各点的y坐标保持不变,但其x坐标则按比例发生了平移。这种情况将水平错切。
下图各点的x坐标保持不变,但其y坐标则按比例发生了平移。这种情况叫垂直错切。
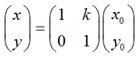
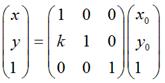
假定一个点经过错切变换后得到,对于水平错切而言,应该有如下关系:
用矩阵表示就是:
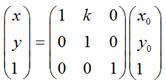
扩展到3 x 3的矩阵就是下面这样的形式:
同理,对于垂直错切,可以有:
在数学上严格的错切变换就是上面这样的。在Android中除了有上面说到的情况外,还可以同时进行水平、垂直错切,那么形式上就是:

五、 对称变换
除了上面讲到的4中基本变换外,事实上,我们还可以利用Matrix,进行对称变换。所谓对称变换,就是经过变化后的图像和原图像是关于某个对称轴是对称的。比如,某点 经过对称变换后得到,
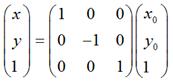
如果对称轴是x轴,难么,

用矩阵表示就是:
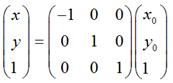
如果对称轴是y轴,那么,

用矩阵表示就是:
如果对称轴是y = x,如图:
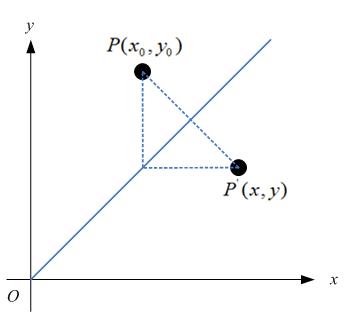
那么,
很容易可以解得:

用矩阵表示就是:
同样的道理,如果对称轴是y = -x,那么用矩阵表示就是:
特殊地,如果对称轴是y = kx,如下图:
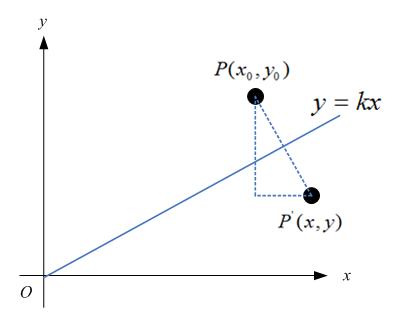
那么,
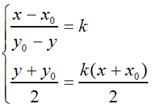
很容易可解得:
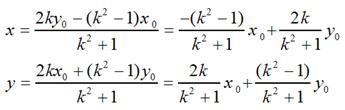
用矩阵表示就是:
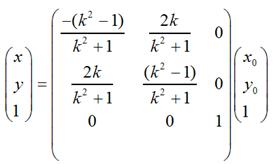
当k = 0时,即y = 0,也就是对称轴为x轴的情况;当k趋于无穷大时,即x = 0,也就是对称轴为y轴的情况;当k =1时,即y = x,也就是对称轴为y = x的情况;当k = -1时,即y = -x,也就是对称轴为y = -x的情况。不难验证,这和我们前面说到的4中具体情况是相吻合的。
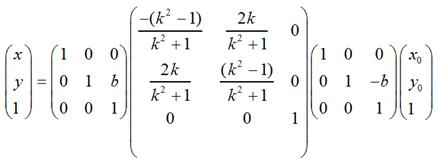
如果对称轴是y = kx + b这样的情况,只需要在上面的基础上增加两次平移变换即可,即先将坐标原点移动到(0, b),然后做上面的关于y = kx的对称变换,再然后将坐标原点移回到原来的坐标原点即可。用矩阵表示大致是这样的:
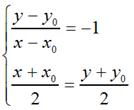
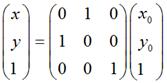
需要特别注意:在实际编程中,我们知道屏幕的y坐标的正向和数学中y坐标的正向刚好是相反的,所以在数学上y = x和屏幕上的y = -x才是真正的同一个东西,反之亦然。也就是说,如果要使图片在屏幕上看起来像按照数学意义上y = x对称,那么需使用这种转换:
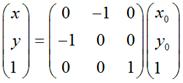
要使图片在屏幕上看起来像按照数学意义上y = -x对称,那么需使用这种转换:
关于对称轴为y = kx 或y = kx + b的情况,同样需要考虑这方面的问题。
下面是Matrix矩阵的实现的部分代码,对照上面的理论进行解释:@author:qhyuan
public class Matrix extends _Original_Matrix {
float mValues[] = new float[9];
...
/**
* Adds the given transformation to the current Matrix
* <p/>This in effect does this = this*matrix
* @param matrix
*/
private void addTransform(float[] matrix) {
float[] tmp = new float[9];
// first row
tmp[0] = matrix[0] * mValues[0] + matrix[1] * mValues[3] + matrix[2] * mValues[6];
tmp[1] = matrix[0] * mValues[1] + matrix[1] * mValues[4] + matrix[2] * mValues[7];
tmp[2] = matrix[0] * mValues[2] + matrix[1] * mValues[5] + matrix[2] * mValues[8];
// 2nd row
tmp[3] = matrix[3] * mValues[0] + matrix[4] * mValues[3] + matrix[5] * mValues[6];
tmp[4] = matrix[3] * mValues[1] + matrix[4] * mValues[4] + matrix[5] * mValues[7];
tmp[5] = matrix[3] * mValues[2] + matrix[4] * mValues[5] + matrix[5] * mValues[8];
// 3rd row
tmp[6] = matrix[6] * mValues[0] + matrix[7] * mValues[3] + matrix[8] * mValues[6];
tmp[7] = matrix[6] * mValues[1] + matrix[7] * mValues[4] + matrix[8] * mValues[7];
tmp[8] = matrix[6] * mValues[2] + matrix[7] * mValues[5] + matrix[8] * mValues[8];
// copy the result over to mValues
mValues = tmp;
}
/** Set the matrix to translate by (dx, dy). */
//平移的增量dx和dy对应于矩阵中的a(0,2)和a(1,2) @auth:qhyuan
@Override
public void setTranslate(float dx, float dy) {
mValues[0] = 1;
mValues[1] = 0;
mValues[2] = dx;
mValues[3] = 0;
mValues[4] = 1;
mValues[5] = dy;
mValues[6] = 0;
mValues[7] = 0;
mValues[8] = 1;
}
/**
* Set the matrix to rotate by the specified number of degrees, with a pivot
* point at (px, py). The pivot point is the coordinate that should remain
* unchanged by the specified transformation.
*/
//该函数是围绕着指定的(px,py)进行旋转,转换矩阵由三部分构成
@Override
public void setRotate(float degrees, float px, float py) {
// TODO: do it in one pass
//第一步:对应于第三个矩阵
// translate so that the pivot is in 0,0
mValues[0] = 1;
mValues[1] = 0;
mValues[2] = -px;
mValues[3] = 0;
mValues[4] = 1;
mValues[5] = -py;
mValues[6] = 0;
mValues[7] = 0;
mValues[8] = 1;
// scale
double rad = Math.toRadians(degrees);
float cos = (float)Math.cos(rad);
float sin = (float)Math.sin(rad);
//第二步:在上面得到的矩阵前面左乘以矩阵
addTransform(new float[] { cos, -sin, 0, sin, cos, 0, 0, 0, 1 });
// translate back the pivot
//第三步再在前面左乘一个矩阵
addTransform(new float[] { 1, 0, px, 0, 1, py, 0, 0, 1 });
}
...
}