霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等)。
python实现
import cv2 import numpy as np # 使用霍夫直线变换做直线检测,前提条件:边缘检测已经完成 __author__ = "boboa" # 标准霍夫线变换 def line_detection_demo(image): gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) edges = cv2.Canny(gray, 50, 150, apertureSize=3) lines = cv2.HoughLines(edges, 1, np.pi/180, 200) # 函数将通过步长为1的半径和步长为π/180的角来搜索所有可能的直线 for line in lines: rho, theta = line[0] # line[0]存储的是点到直线的极径和极角,其中极角是弧度表示的 a = np.cos(theta) # theta是弧度 b = np.sin(theta) x0 = a * rho y0 = b * rho x1 = int(x0 + 1000 * (-b)) # 直线起点横坐标 y1 = int(y0 + 1000 * (a)) # 直线起点纵坐标 x2 = int(x0 - 1000 * (-b)) # 直线终点横坐标 y2 = int(y0 - 1000 * (a)) # 直线终点纵坐标 cv2.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2) cv2.imshow("image_lines", image) # 统计概率霍夫线变换 def line_detect_possible_demo(image): gray = cv2.cvtColor(image, cv2.COLOR_BGRA2GRAY) edges = cv2.Canny(gray, 50, 150, apertureSize=3) # 函数将通过步长为1的半径和步长为π/180的角来搜索所有可能的直线 lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 100, minLineLength=50, maxLineGap=10) for line in lines: x1, y1, x2, y2 = line[0] cv2.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2) cv2.imshow("line_detect_possible_demo", image) if __name__ == "__main__": img = cv2.imread("image/lines.jpg") cv2.namedWindow("input image", cv2.WINDOW_AUTOSIZE) cv2.imshow("input image", img) line_detect_possible_demo(img) cv2.waitKey(0) cv2.destroyAllWindows()
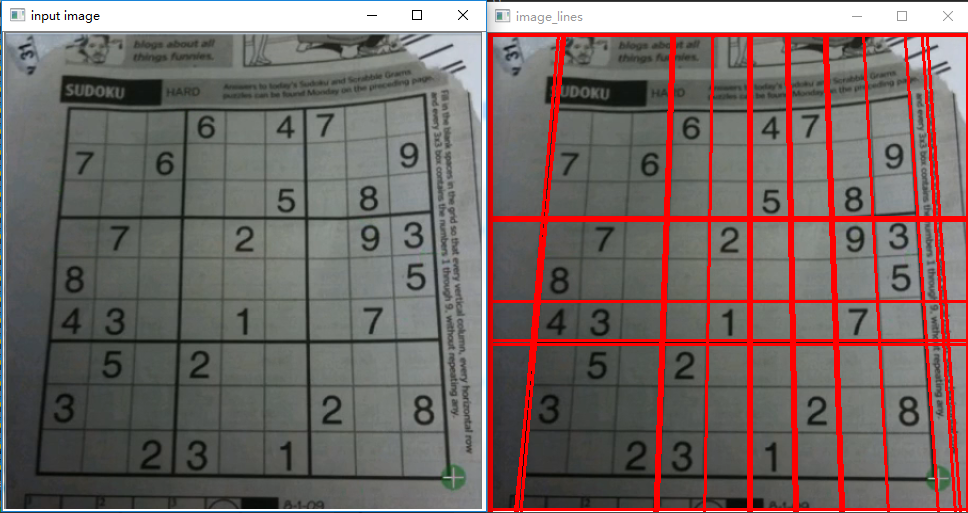
标准霍夫线变换运行结果
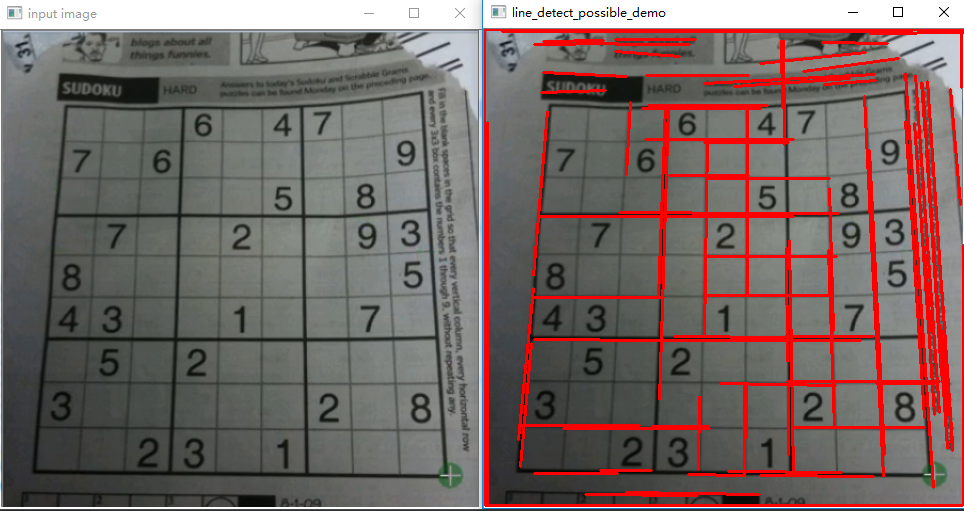
统计概率霍夫线变换运行结果
标准霍夫线变换cv2.HoughLines(image, rho, theta, threshold[, lines[, srn[, stn[, min_theta[, max_theta]]]]]) -> lines
参数:image-边缘检测的输出图像,8位,单通道二进制源图像
rho-距离步长
theta-角度步长
threshold-阈值,只有大于该值的点才有可能被当作极大值,即至少有多少条正弦曲线交于一点才被认为是直线
统计概率霍夫线变换cv2.HoughLinesP(image, rho, theta, threshold[, lines[, minLineLength[, maxLineGap]]]) -> lines
参数:image-边缘检测的输出图像,该图像为单通道8位二进制图像
rho-参数极径  以像素值为单位的分辨率,这里一般使用 1 像素
以像素值为单位的分辨率,这里一般使用 1 像素
theta-参数极角  以弧度为单位的分辨率,这里使用 1度
以弧度为单位的分辨率,这里使用 1度
threshold-检测一条直线所需最少的曲线交点
minLineLength-线的最短长度,比这个线短的都会被忽略
maxLineGap-两条线之间的最大间隔,如果小于此值,这两条线就会被看成一条线。
HoughLinesP,效果更好,检测图像中分段的直线(而不是贯穿整个图像的直线)