轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓发现结果。
python实现
import cv2 import numpy as np __author__ = "boboa" def contours_demo(image): dst = cv2.GaussianBlur(image, (3, 3), 0) gray = cv2.cvtColor(dst, cv2.COLOR_BGR2GRAY) ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) cv2.imshow("binary image", thresh) # 得到修改后的图像,轮廓,轮廓的层次 cloneimage, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) """ cv2.findContours(image, mode, method, contours, hierarchy, offset) 参数: 1 要寻找轮廓的图像 只能传入二值图像,不是灰度图像 2 轮廓的检索模式,有四种: cv2.RETR_EXTERNAL表示只检测外轮廓 cv2.RETR_LIST检测的轮廓不建立等级关系 cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层 cv2.RETR_TREE建立一个等级树结构的轮廓 3 轮廓的近似办法 cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1 cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息 返回值: contours:一个列表,每一项都是一个轮廓,不会存储轮廓所有的点,只存储能描述轮廓的点 hierarchy:一个ndarray, 元素数量和轮廓数量一样, 每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3], 分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数 """ for i, contour in enumerate(contours): # 绘制轮廓 cv2.drawContours(image, contours, i, (0, 0, 255), 2) """ # 函数cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset) # 第一个参数是一张图片,可以是原图或者其他。 # 第二个参数是轮廓,也可以说是cv2.findContours()找出来的点集,一个列表。 # 第三个参数是对轮廓(第二个参数)的索引,当需要绘制独立轮廓时很有用,若要全部绘制可设为-1。 # 接下来的参数是轮廓的颜色和厚度 """ print(i) cv2.imshow("detect contours", image) if __name__ == "__main__": img = cv2.imread("image/circles.jpg") cv2.namedWindow("input image", cv2.WINDOW_AUTOSIZE) cv2.imshow("input image", img) contours_demo(img) cv2.waitKey(0) cv2.destroyAllWindows()
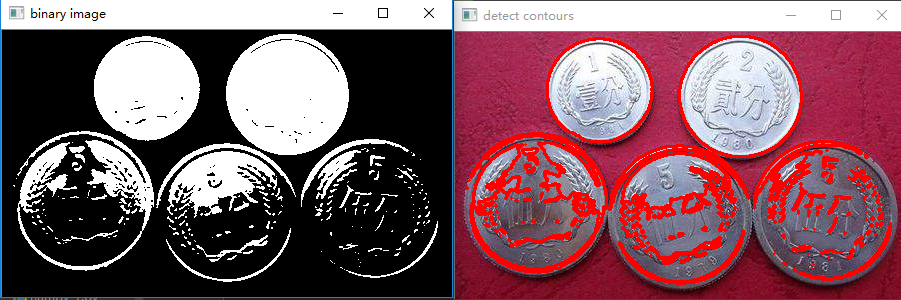
二值化图像和检测到的轮廓如下图