正则化
虚拟对抗训练是一种正则化方法,正则化在深度学习中是防止过拟合的一种方法。通常训练样本是有限的,而对于深度学习来说,搭设的深度网络是可以最大限度地拟合训练样本的分布的,从而导致模型与训练样本分布过分接近,还把训练样本中的一些噪声也拟合进去了,甚至于最极端的,训练出来的模型只能判断训练样本,而测试样本变成了随机判断。所以为了让模型泛化地更好,正则化是很有必要的。
最常见的正则化是直接对模型的参数的大小进行限制,比如将参数(整合为向量$ heta$)的$L_2$范数:
$displaystyle J( heta)=frac{1}{n}sumlimits_i^n heta_i^2$
作为正则项加入损失函数中,得到总的损失函数:
$displaystyle L( heta)=frac{1}{N}sumlimits_{i=1}^NL(y_i, x_i, heta) + lambda J( heta)$
从而约束参数不会很大而过于复杂,使模型符合奥卡姆剃刀原理:所有合适的模型中应该选择最简单的那个。
然而,这种正则化仅仅符合了奥卡姆剃刀而已,而且它的定义是很模糊的。因为你不知道什么模型才是“简单”的,而且仅仅用范数来限制也不一定就会产生“简单”的模型,甚至于,“简单”的模型也未必就是泛化能力强的模型。
对抗训练
相较于范数类型的正则项,论文中引用了另一篇论文,这篇论文从另一个角度来看待正则化,基于这样一个假设$A$:对于输入样本的微小变动,模型对它的预测输出也应该不会有很大的改变。这个对于连续函数来说是理所当然的(排除一些梯度特别大的连续函数),但是对于一些神经网络模型来说,它们内部层与层之间的交互是有阈值的,超过这个阈值才能把信息传到下一层,导致函数不连续,从而输入的微小改变就会对后面的输出产生巨大的影响(论文中指出,仅仅使用$L_p$范数做正则项就容易产生这样的问题)。它的正则项定义如下:
$displaystyle J( heta) = frac{1}{N}sumlimits_{i=1}^NL_{adv}(x_i, heta)$
${ m where}\,L_{adv}(x_i, heta) = D[q(y|x_i),p(y|x_i+r_{adv_i}, heta)]$
${ m where}\,r_{adv_i}= mathop{argmax}limits_{r;||r||_2leqepsilon} D[q(y|x_i),p(y|x_i+r, heta)]$
这个公式假设模型是生成模型,因为判别模型可以转化为生成模型,所以不另外添加公式了。其中,$D[q,p]$表示分布$q$和$p$的差异,用交叉熵、相对熵(KL散度)等表达;$q(y|x_i)$表示训练样本$x_i$的标签真实分布;$p(y|x_i, heta)$表示模型参数为$ heta$时对$x_i$的标签预测分布;$r_{adv_i}$表示能使$x_i$预测偏差最大化的扰动向量(范数很小)。
因此,这个正则项的定义就是:在每一个训练样本点的周围(固定范围$epsilon$),找一个预测分布和这个样本点标签的真实分布相差最大的样本点($x_i+r_{adv_i}$),然后优化模型参数$ heta$来减小这个偏差。在每一次迭代优化$ heta$减小损失函数$L( heta)$之前,都要先计算一次$r_{adv_i}$,即获取当前$ heta$下使每个$x_i$偏差最大的扰动向量,进而获取当前扰动的最大偏差作为正则项。如此看来好像是在对抗损失函数的减小,因此叫对抗训练,而 $r_{adv_i}$则叫对抗方向。
因为实际上样本点的真实连续分布并不能获得,所以使用离散的概率来作为分布,论文中使用one hot vector $h(y=y_{real})$来表达。这个向量是一串0-1编码,真实标签对应的向量元素为1,其它向量元素都为0,比如标签有:猫、狗、汽车,则$h(y = 狗)=[0,1,0]$,使用one hot vector的好处之一就是切断了不同标签之间在连续数值上的联系。
于是我们很容易能想到,对抗方向应该在$L_{adv}(x_i, heta) $对$x_i$求梯度时能取到近似(因为在梯度方向函数变化率最大),即:
$displaystyle r_{adv_i}approxepsilonfrac{g_i}{||g_i||_2},\,{ m where}\,g_i= abla_{x}D[h(y=y_{x_i}),p(y|x, heta)]|_{x=x_i}$
因为需要训练样本的真实标签分布,所以对抗训练只适用于监督学习。
论文指出,使用对抗方向来进行扰动的表现是比随机扰动要好的。随机扰动就是在$x_i$周围$epsilon$内随机找一个较小的扰动$r_{rad_i}$代替$r_{adv_i}$。尽管随机扰动的目标也是假设A,但是最终的训练结果是比对抗扰动差很多的。
虚拟对抗训练
虚拟对抗训练(VAT Visual adversarial training)是基于对抗训练改进的正则化算法。它主要对对抗训练进行了两个地方的改进:
局部平滑度
在$L_{adv}(x_i, heta)$定义中的标签真实分布$q(y|x_i)$被换成了当前迭代下的标签预测分布$p(y|x_i,hat{ heta})$($hat{ heta}$表示当前梯度下降下的$ heta$的具体值,而$ heta$则是在损失函数中用来求梯度进行梯度下降的自变量)。另外还给$L_{adv}(x_i, heta)$换了个名字——LDS(Local distributional smoothness 局部分布平滑度),定义如下:
${ m LDS}(x_i, heta) = D[p(y|x_i,hat{ heta}),p(y|x_i+r_{vadv_i}, heta)]$
$\,{ m where}\,r_{vadv_i}=mathop{argmax}limits_{r;||r||_2leqepsilon} D[p(y|x_i,hat{ heta}),p(y|x_i+r,hat{ heta})]$
我们可能会疑惑,为什么计算$r_{vadv}$用$hat{ heta}$,而不用$ heta$,明显用$ heta$更精确。论文中也没有给出明确的说明,可能它忘了说明这一点。不过这个细节也的确不容易察觉,在后面我会说一下我的理解。
可以发现,${ m LDS}(x_i, heta)$并不需要$x_i$的标签真实分布,所以即使$x_i$是没有真实标记的样本点,同样可以加入训练,因此VAT不但适用于监督学习,还适用于半监督学习。以下是使用VAT的简化的损失函数($mathcal{D_l,D_{ul}}$分别为有标记样本和无标记样本集):
$displaystyle L( heta)=sumlimits_{(x,y)inmathcal{D_l}}L(y, x, heta) +lambda frac{1}{N_l+N_{ul}}sumlimits_{xinmathcal{D_l,D_{ul}}}{ m LDS}(x, heta)$
快速计算rvadv
对于计算$r_{vadv}$,论文并不直接使用关于$x_i$的梯度。因为显然$D[p(y|x_i,hat{ heta}),p(y|x_i+r,hat{ heta})]$在$r=0$时,两个分布完全相同,熵为0,如果可导,那么$x_i$就在极小值点上,从而梯度为0。于是论文换了一个思考角度,要求$D(r,x_i,hat{ heta})$(简化写法)最大化,不一定只能从梯度的角度考虑。将它关于$r$在0处进行泰勒展开后,因为一阶导数(梯度)为0,发现有如下近似:
$displaystyle D(r,x_i,hat{ heta})approxfrac{1}{2}r^THr+O(r^2)$
其中$O(r^2)$是$r^2$的高阶无穷小,$H= abla abla_rD(r,x_i,hat{ heta})|_{r=0}$是Hessian矩阵。由Hessian矩阵的定义可知,该矩阵是实对称矩阵,一定有对应维数个相互线性无关的特征向量。由特征值和特征向量的定义得,对于范数大小固定的$r$,当$r$是最大特征值对应的特征向量时,能取得$r^THr$最大,又因为$r$的范数很小,后面的高阶无穷小可以忽略不计,相应地,$D(r,x_i,hat{ heta})$也取得最大。所以:
$r_{vadv}approxmathop{argmax}limits_{r;||r||_2leqepsilon}r^THr=epsilonoverline{u}$
其中$overline{u}$表示$H$的最大特征值对应的单位特征向量。但是,计算高维的Hessian矩阵是很困难的,更不用说再计算它的特征值和特征向量了。所以,论文使用幂法(幂迭代法,具体算法看此链接)来计算矩阵最大特征值对应的特征向量。即随机取一个同维度的向量$d$(假设用特征向量表达$d$时,$u$的系数不为0),进行以下迭代:
$d=overline{Hd}$
迭代到后期,$d$会无限接近于$overline{u}$。然后,论文又用所谓的有限差分法,来避免计算 Hessian矩阵。有限差分法就是用所谓的差商代替微商来近似计算导数,差商就是用比较小的因变量除以对应的自变量,微商就是用因变量的极限(无限小)除以对应自变量的极限。于是,0处的“二阶导数”$H$乘上一个较小的自变量$xi d$,就可以近似0到$xi d$处的一阶导数(梯度)的变化量:
$xi Hdapprox abla_rD(r,x_i,hat{ heta})|_{r=xi d}- abla_rD(r,x_i,hat{ heta})|_{r=0}$
由于$r=0$处的梯度为0:
$displaystyle Hdapproxfrac{ abla_rD(r,x_i,hat{ heta})|_{r=xi d}}{xi}$
所以迭代式变为:
$d=overline{ abla_rD(r,x_i,hat{ heta})|_{r=xi d}}$
论文中实验,迭代一次就能获取很好的近似$u$的效果。即:
$displaystyle r_{vadv}approxepsilonfrac{g}{||g||_2}$
${ m where}\,g= abla_rD[p(y|x_i,hat{ heta}),p(y|x_i+r,hat{ heta})]|_{r=xi d}$
我觉得迭代一次的原因应该是:相较迭代获取精度更高的虚拟对抗方向,计算力省下来用于梯度下降,更快地收敛整个模型更好。或者梯度下降前期迭代近似$r_{vadv}$次数少一些,后期再逐渐增加迭代次数增加收尾时的精度。
说一下我对为什么要用$hat{ heta}$,而不用$ heta$的理解。因为需要计算$r=xi d$处的梯度并进行迭代,如果使用不能当具体数值参与计算的参数$ heta$,就只能把整个迭代写成一次性计算的算式形式了,而且不能动态改变迭代的次数。并且随着迭代次数增多,参数$ heta$的数量会指数式上升。当然,如果和上面一样只迭代一次,我觉得是可以使用$ heta$的。不过论文第6页左上角好像说明了这点,当时没看懂,说的应该就是这个意思:

额外正则项
另外,在实验中,论文除了LDS正则项外,还添加了条件熵作为额外的正则项。定义如下:
$displaystylemathcal{H}(Y|X)=-frac{1}{N_l+N_{ul}}sumlimits_{xin mathcal{D_l,D_{ul}}}sumlimits_{y}p(y|x, heta)log p(y|x, heta)$
表示除了相似输入应该有相似输出外(减小LDS),输出标签的概率分布还应该越集中越好(减小$mathcal{H}(Y|X)$)。因为在$X$条件下$Y$的混乱度(熵)代表了输出概率分布的不集中度的平均值,所以优化条件熵越小,输出概率分布越集中、越确定。而预测地越明确越好自然是我们想要的。
VAT效果
下图展示了使用VAT进行半监督训练的过程:
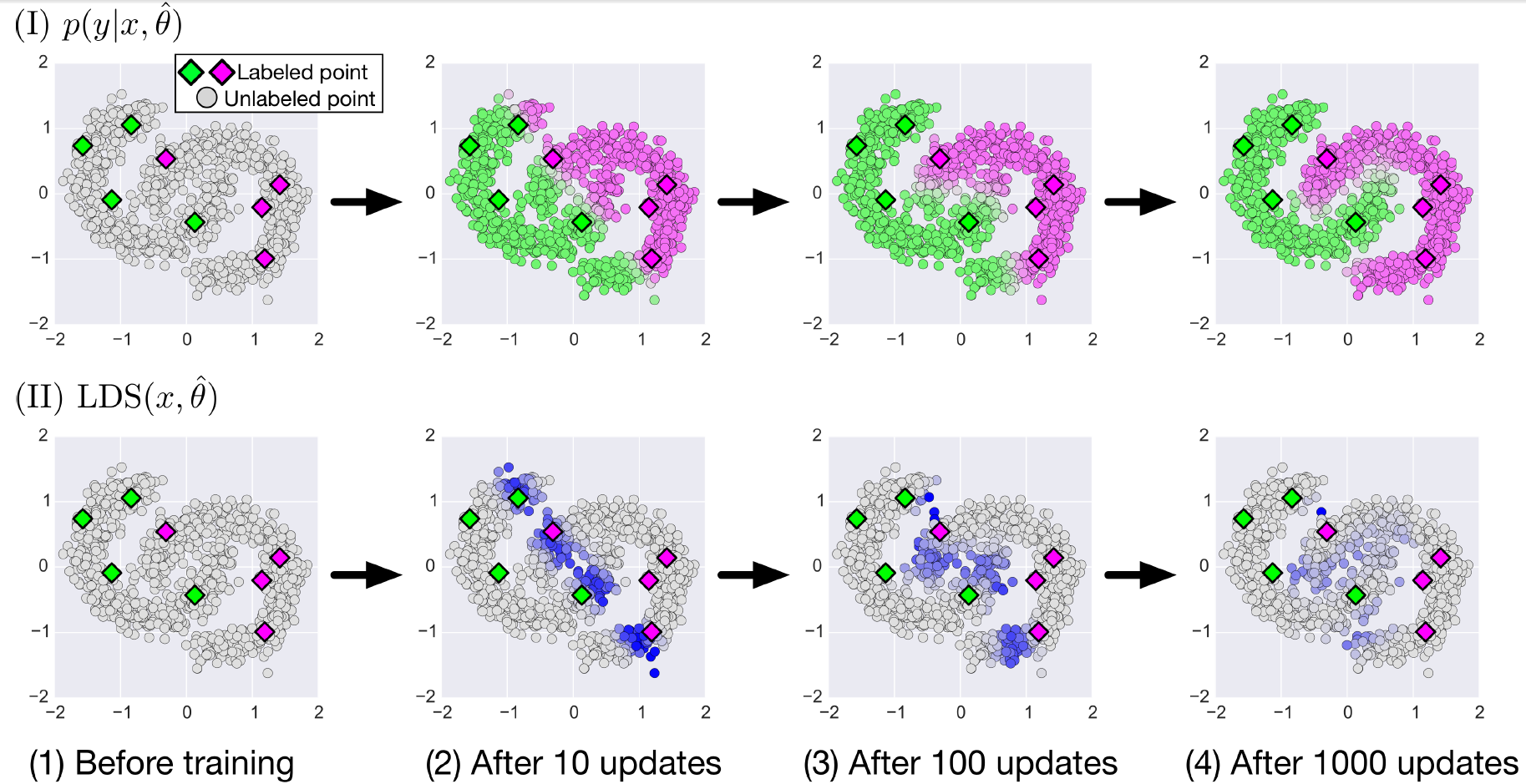
图中方形图标是有标签训练样本,圆形图标是无标签训练样本。分成上下两部分,分别展示了在训练之前、训练更新(梯度下降)10次、100次、1000次时,模型对无标签训练样本的预测情况$({ m I})$,和无标签训练样本的LDS$({ m II})$。样本的输入为二维,分别用横纵坐标表示。模型预测输出为一维,从绿到灰,再到紫,用连续的颜色过渡来表示预测标签为某个类别的概率(紫色概率为1,绿色概率为0,灰色为0.5),如$({ m I})$所示。$({ m II})$用灰色到紫色表示无标签样本的LDS大小,越紫说明该样本点在当前模型下的LDS越大,说明对这个样本点进行小扰动会使当前模型的预测出现大偏差。
$({ m I})$可以看出,随着不断的更新,无标签样本的预测从有标签样本“传染”出去(因为遵循相近的样本预测相同的理念),直到停在无标签样本稀疏的地方(因为没有样本再进行减小LDS的“传染”,而稀疏的地方也正好就是两个类别的分界线),最终形成了两个镶嵌着的半圆环。这个“传染”的效果是我之前没想到的,我以为减小LDS的效果仅仅局限在有标签样本的周围。但是加了大量的无标签样本后,这些样本对模型进行了总体的“把控”,而少量的有标签样本则对这个总体进行了“固定”,二者联动,使得VAT半监督学习的学习效果很好。
$({ m II})$显示LDS随着模型的更新,越来越小,最后LDS较大大的样本点都分布在两个标签的分界线处。
论文信息
Virtual Adversarial Training: A Regularization Method for Supervised and Semi-Supervised Learning