支持向量机的目标是
[underbrace {min }_ heta left{ {Cleft[ {sumlimits_{i = 1}^m {{y^{left( i ight)}}{mathop{ m Cos} olimits} {t_1}left( {{ heta ^T}{x^{left( i ight)}}} ight) + left( {1 - {y^{left( i ight)}}} ight){mathop{ m Cos} olimits} {t_0}left( {{ heta ^T}{x^{left( i ight)}}} ight)} } ight] + frac{1}{2}sumlimits_{j = 1}^n { heta _j^2} } ight}]
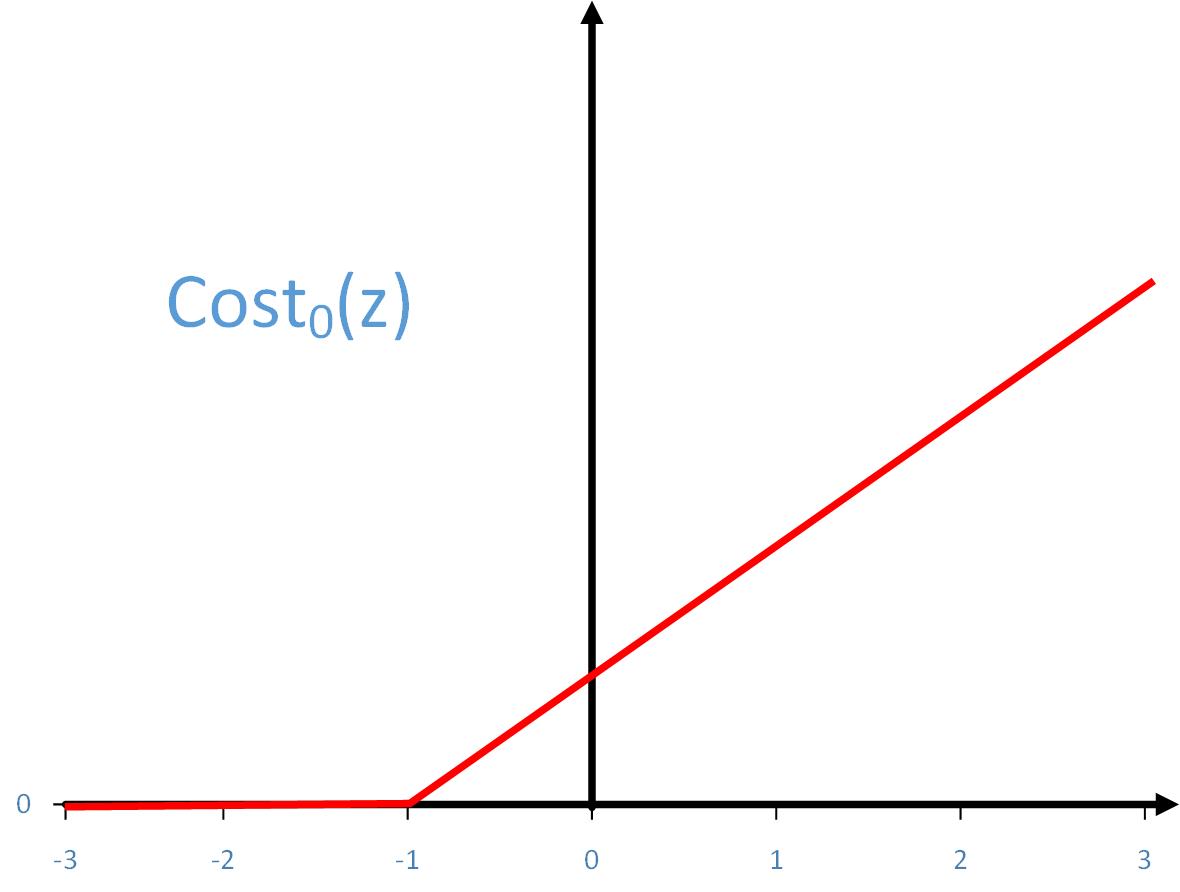
下图分别是Cost1(z)和Cost0(z)的示意图
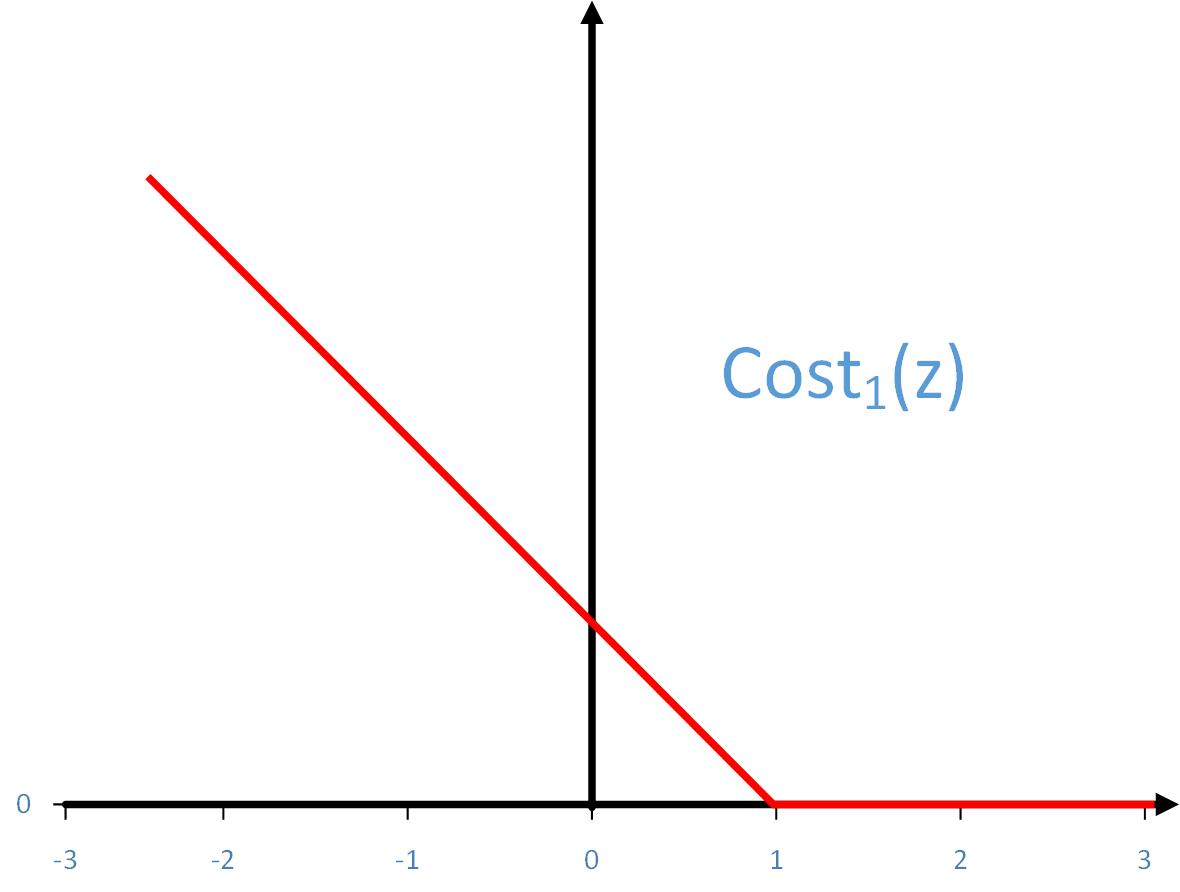
如果y=1,我们想要θTx≥1(而不仅仅是θTx≥0)
如果y=0,我们想要θTx≤-1(而不仅仅是θTx<0)
接下来考虑一种情况,当把式子中的C设置的非常大时
[underbrace {min }_ heta left{ {Cleft[ {sumlimits_{i = 1}^m {{y^{left( i ight)}}{mathop{ m Cos} olimits} {t_1}left( {{ heta ^T}{x^{left( i ight)}}} ight) + left( {1 - {y^{left( i ight)}}} ight){mathop{ m Cos} olimits} {t_0}left( {{ heta ^T}{x^{left( i ight)}}} ight)} } ight] + frac{1}{2}sumlimits_{j = 1}^n { heta _j^2} } ight}]
支持向量机为达到最小化的目的会试图将式子的第一部分(除了C)变得很小。
当y(i)=1时,得到的θ会使得θTx≥1
当y(i)=0时,得到的θ会使得θTx<-1
这样就会得到一个“比较有意思”的“decision boundary”。对于如下分类问题
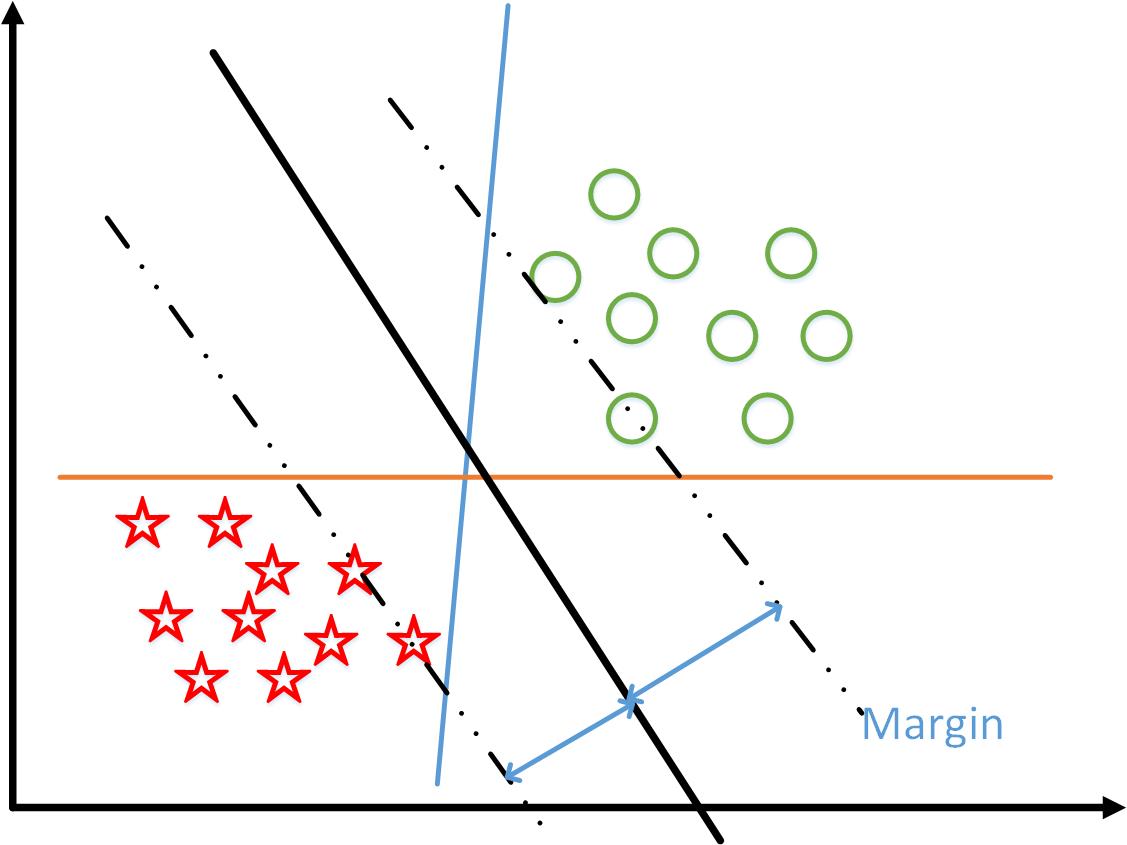
算法可以得到“蓝线”和“橙线”的分界线,也可以得到“黑色”分界线,支持向量机会得到黑色的线。
如果两条黑色虚线代表不同类的边界的话,支持向量机会得到距离两条虚线尽量远的一条直线。
需要注意的点

对于下面的分类问题,正常情况下应该得到蓝色的直线。
但是,当C非常大时,支持向量机会得到黄色的直线,因为它会得到距离两个类尽量远的直线。
如果取得C适当,支持向量机仍然会得到蓝色的先,即使出现非线性可分的情况(右侧红五角星)。