在CNN(1)中,我们用到下图来说明卷积之后feature maps尺寸和深度的变化。这一节中,我们讨论feature map size, padding and stride。
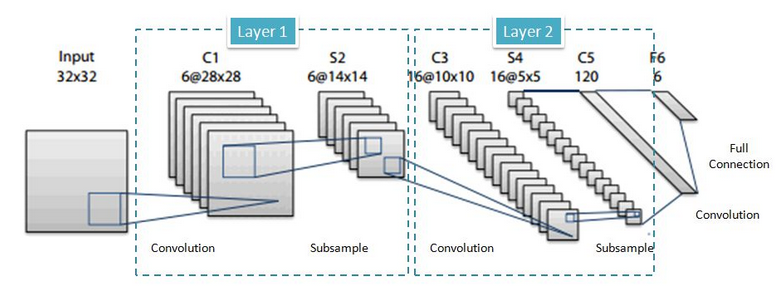
首先,在Layer1中,输入是32x32的图片,而卷积之后为28x28,试问filter的size(no padding)? (答案是5x5)。 如果没答上来,请看下图:
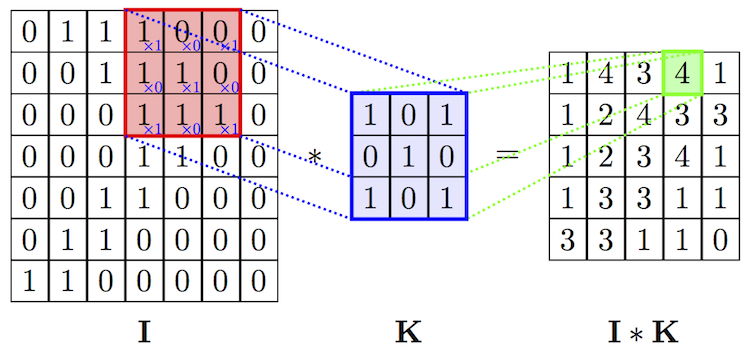
I是一张7x7的图片,filter是3x3的,I*K生成的feature map是5x5的。所以我们推出feature map size公式为:

其中n(l)表示在l层中图片的大小,f(l)是filter的大小所以在最初的问题中filtersize=32-28+1=5。
而在convolution操作中,有一个padding参数可以在原图外围加上空白格,从而使feature map的size不发生变化。通常不使用padding的Convolution称为Valid Convolution,而使用padding输出相同size的feature map,则称为Same Convolution。Feature map和Padding的Size计算公式为:

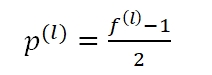
其中,p(l)是padding的大小。使用Padding的原因主要有二:
第一,因为architecture的原因,不希望图片尺寸发生变化;
其二,如果不使用padding,在图片边缘的pixel只被计算了一次,其数据被低估了。
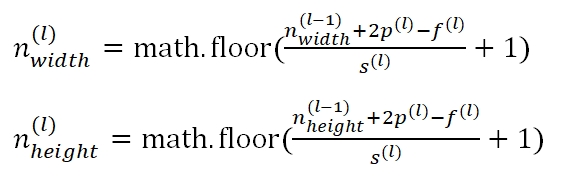
Stride是表示filter工作间隔的参数,默认是1,根据需要可以设置为其他值,在设置了Stride之后,feature map的计算公式为:

其中,s(l)是stride步幅的大小。当然,图片并不都是正方的,我们可以分别计算feature map的width和height