1. 范数定义,l0,l1,l2范数公式及几何意义
博客: https://blog.csdn.net/a493823882/article/details/80569888
2.矩阵元范数以及Frobenius norm(F范数)定义
https://blog.csdn.net/David_Jett/article/details/77040087
3.旋转矩阵的证明
https://www.youtube.com/watch?v=8XRvpDhTJpw
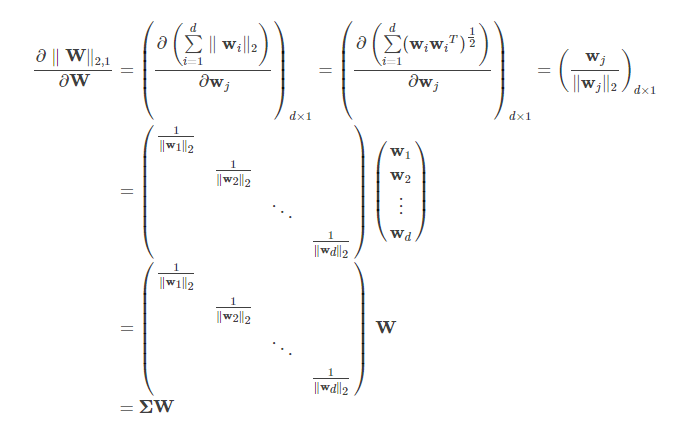
4.矩阵L2,1范数及矩阵L2,p范数的求导
https://blog.csdn.net/lqzdreamer/article/details/79676305?tdsourcetag=s_pctim_aiomsg
4.1矩阵的 Frobenius 范数及其求偏导法则
https://blog.csdn.net/txwh0820/article/details/46392293
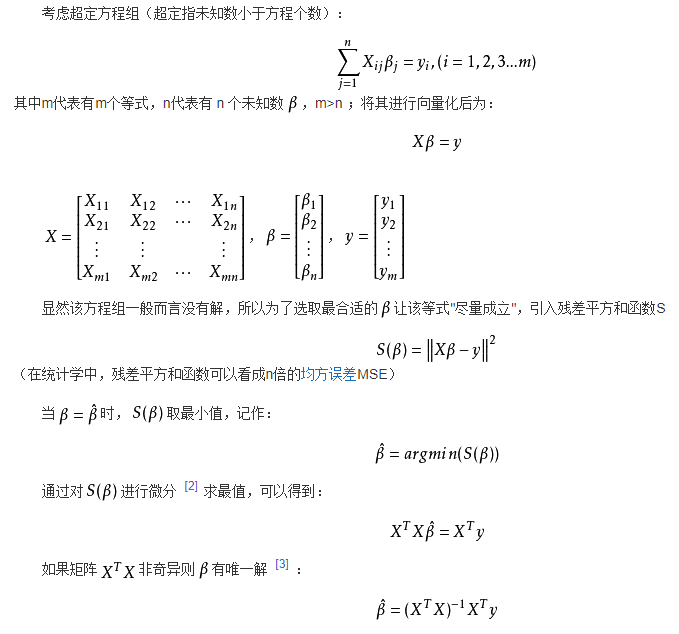
5.最小二乘回归
5.1定义
百度百科:
最小二乘法(又称最小平方法)通过最小化误差的平方和寻找数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。最小二乘法还可用于曲线拟合。其他一些优化问题也可通过最小化能量或最大化熵用其来表达。
5.2基本公式
百度百科:
6.拉格朗日乘子
待更新