附录-Properties in Algebra
部分证明转载自标注,仅作个人整理查阅用。
范数 (norm) (^{[1]})
要更好的理解范数,就要从函数、几何与矩阵的角度去理解,我尽量讲的通俗一些。我们都知道,函数与几何图形往往是有对应的关系,这个很好想象,特别是在三维以下的空间内,函数是几何图像的数学概括,而几何图像是函数的高度形象化,比如一个函数对应几何空间上若干点组成的图形。但当函数与几何超出三维空间时,就难以获得较好的想象,于是就有了映射的概念,映射表达的就是一个集合通过某种关系转为另外一个集合。通常数学书是先说映射,然后再讨论函数,这是因为函数是映射的一个特例。
为了更好的在数学上表达这种映射关系,(这里特指线性关系)于是就引进了矩阵。这里的矩阵就是表征上述空间映射的线性关系。而通过向量来表示上述映射中所说的这个集合,而我们通常所说的基,就是这个集合的最一般关系。于是,我们可以这样理解,一个集合(向量),通过一种映射关系(矩阵),得到另外一个集合(另外一个向量)。
那么向量的范数,就是表示这个原有集合的大小;而矩阵的范数,就是表示这个变化过程的大小的一个度量。那么说到具体几几范数,其不过是定义不同,一个矩阵范数往往由一个向量范数引出,我们称之为算子范数,其物理意义都如我上述所述。
具体怎么用,看不同的领域,看你来自计算机领域 用的比较多的就是迭代过程中收敛性质的判断,如果理解上述的意义,在计算机领域,一般迭代前后步骤的差值的范数表示其大小,常用的是二范数,差值越小表示越逼近实际值,可以认为达到要求的精度,收敛。
L-p范数定义
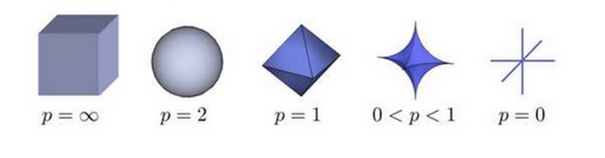
上图表示了p从无穷到0变化时,三维空间中到原点的距离(范数)为1的点构成的图形的变化情况。以常见的L-2范数(p=2)为例,此时的范数也即欧氏距离,空间中到原点的欧氏距离为1的点构成了一个球面。
(L_0)范数
在实际应用中,由于(L_0)范数本身不容易有一个好的数学表示形式,给出上面问题的形式化表示是一个很难的问题,故被人认为是一个NP难问题。所以在实际情况中,(L_0)的最优问题会被放宽到(L_1)或(L_2)下的最优化。 在通常情况下,大家都用"0范数"表示向量(x)中非零元素的个数。
(L_1)范数
表示向量(x)中非零元素的绝对值之和。
(L_1)范数有很多的名字,例如我们熟悉的曼哈顿距离、最小绝对误差等。使用(L_1)范数可以度量两个向量间的差异,如绝对误差和(Sum of Absolute Difference).
(L_2)范数
我们用的最多的度量距离:欧氏距离就是一种(L_2)范数,它的定义如下:
(L_infty)范数
主要用来表示向量元素中的最大项值,通常用此来表示:
实对称矩阵
对称矩阵(Symmetric Matrices):是指以主对角线为对称轴,各元素对应相等的矩阵。在线性代数中,对称矩阵是一个方形矩阵,其转置矩阵和自身相等。
实对称矩阵:如果有n阶矩阵A,其矩阵的元素都为实数,且矩阵A的转置等于其本身((a_{ij}=a_{ji})),则称A为实对称矩阵。
实对称矩阵里的元素全是实数,而对称矩阵只说明(A=A^T),没说明矩阵中的元素是实数, 阵中的元素不仅可以是实数,也可以是虚数,甚至元素本身就是一个矩阵或其它更一般的数学对象,实对称矩阵就说明了矩阵中的元素要是实数。
- 性质1:实对称矩阵的特征值都是实数
[ ]
- 性质2:实对称属于不同特征值的特征向量正交
[ ]
- 性质3:若(lambda_0)是实对称矩阵A的 k 重特征值,则与对(lambda_0)应的有 k 个线性无关的特征向量
[ ]
- 性质4:n 阶实对称矩阵 正交相似 于以特征值为对角的对角矩阵。
矩阵的逆
若方阵(A)满足(|A| eq0),则称(A)为非退化方阵或非奇异方阵,反正,则称其为退化方阵,下令(A=(a_{ij}))为一非退化方阵,令:
则有(AB=BA=I),称(B)为(A)的逆,记作(B=A^{-1}),易证(B)也是一个非退化方阵,且(A)的逆是唯一的。
- (AA^{-1}=A^{-1}A=I)
- ((A')^{-1}=(A^{-1})')
- 若(A,C)均为(p)阶非退化方阵,则:((AC)^{-1}=C^{-1}A^{-1})
- (|A|^{-1}=|A^{-1}|)
- 若(A)为正交矩阵,则(A^{-1}=A')
- 若(A=diag(a_{ii}))非退化,则:(A^{-1}=diag(a_{ii}^{-1}))
- 若(A,B)为非退化方阵,则
非奇异矩阵的分块矩阵求逆
设(A)是(p)阶满秩矩阵,它的逆矩阵为(A^{-1}),他们可表示为下列分块矩阵:
其中(A_{11},A^{11})均为(r imes r)矩阵,(A_{22},A^{22})均为(s imes s)矩阵,且(r+s=p)。
(^{[1]})范数对于数学的意义?1范数、2范数、无穷范数