实验要求:
结合中断上下文切换和进程上下文切换分析Linux内核一般执行过程
-
以fork和execve系统调用为例分析中断上下文的切换
-
分析execve系统调用中断上下文的特殊之处
-
分析fork子进程启动执行时进程上下文的特殊之处
-
以系统调用作为特殊的中断,结合中断上下文切换和进程上下文切换分析Linux系统的一般执行过程
1.fork系统调用
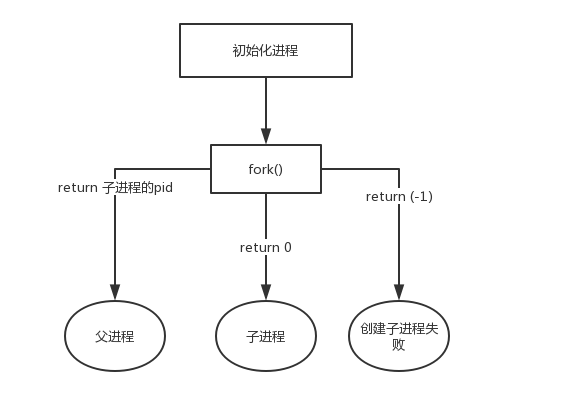
fork系统调用用于创建一个新进程,称为子进程,它与进程(称为系统调用fork的进程)同时运行,此进程称为父进程。创建新的子进程后,两个进程将执行fork()系统调用之后的下一条指令。子进程使用相同的pc(程序计数器),相同的CPU寄存器,在父进程中使用的相同打开文件。调用fork之后,数据、堆、栈有两份,代码仍然为一份但是这个代码段成为两个进程的共享代码段都从fork函数中返回。fork给父进程返回子进程pid,给其拷贝出来的子进程返回0,这也是他的特点之一,一次调用,两次返回,所以与一般的系统调用处理流程也必定不同。
Linux下用于创建进程的API有三个fork,vfork和clone,这三个函数分别是通过系统调用sys_fork,sys_vfork以及sys_clone实现的(目前讨论的都是基于x86架构的)。而且这三个系统调用,都是通过do_fork来实现的,只是传入了不同的参数。所以我们可以得出结论:所有的子进程是在do_fork实现创建和调用的。
查看do_fork的代码:
long do_fork(unsigned long clone_flags, unsigned long stack_start, unsigned long stack_size, int __user *parent_tidptr, int __user *child_tidptr) { struct task_struct *p; int trace = 0; long nr; /* * Determine whether and which event to report to ptracer. When * called from kernel_thread or CLONE_UNTRACED is explicitly * requested, no event is reported; otherwise, report if the event * for the type of forking is enabled. */ if (!(clone_flags & CLONE_UNTRACED)) { if (clone_flags & CLONE_VFORK) trace = PTRACE_EVENT_VFORK; else if ((clone_flags & CSIGNAL) != SIGCHLD) trace = PTRACE_EVENT_CLONE; else trace = PTRACE_EVENT_FORK; if (likely(!ptrace_event_enabled(current, trace))) trace = 0; } p = copy_process(clone_flags, stack_start, stack_size, child_tidptr, NULL, trace); /* * Do this prior waking up the new thread - the thread pointer * might get invalid after that point, if the thread exits quickly. */ if (!IS_ERR(p)) { struct completion vfork; struct pid *pid; trace_sched_process_fork(current, p); pid = get_task_pid(p, PIDTYPE_PID); nr = pid_vnr(pid); if (clone_flags & CLONE_PARENT_SETTID) put_user(nr, parent_tidptr); if (clone_flags & CLONE_VFORK) { p->vfork_done = &vfork; init_completion(&vfork); get_task_struct(p); } wake_up_new_task(p); /* forking complete and child started to run, tell ptracer */ if (unlikely(trace)) ptrace_event_pid(trace, pid); if (clone_flags & CLONE_VFORK) { if (!wait_for_vfork_done(p, &vfork)) ptrace_event_pid(PTRACE_EVENT_VFORK_DONE, pid); } put_pid(pid); } else { nr = PTR_ERR(p); } return nr; }
不难发现,创建新进程是由copy_process()这个函数实现的
static __latent_entropy struct task_struct *copy_process( struct pid *pid, int trace, int node, struct kernel_clone_args *args) { ... p = dup_task_struct(current, node); ... /* copy all the process information */ shm_init_task(p); retval = security_task_alloc(p, clone_flags); if (retval) goto bad_fork_cleanup_audit; retval = copy_semundo(clone_flags, p); if (retval) goto bad_fork_cleanup_security; retval = copy_files(clone_flags, p); if (retval) goto bad_fork_cleanup_semundo; retval = copy_fs(clone_flags, p); if (retval) goto bad_fork_cleanup_files; retval = copy_sighand(clone_flags, p); if (retval) goto bad_fork_cleanup_fs; retval = copy_signal(clone_flags, p); if (retval) goto bad_fork_cleanup_sighand; retval = copy_mm(clone_flags, p); if (retval) goto bad_fork_cleanup_signal; retval = copy_namespaces(clone_flags, p); if (retval) goto bad_fork_cleanup_mm; retval = copy_io(clone_flags, p); if (retval) goto bad_fork_cleanup_namespaces; retval = copy_thread_tls(clone_flags, args->stack, args->stack_size, p, args->tls); if (retval) goto bad_fork_cleanup_io; ... return p; ...
copy_process()做的主要工作如下:
(1)调用 dup_task_struct 复制一份task_struct结构体,作为子进程的进程描述符;
(2)初始化与调度有关的数据结构,调用了sched_fork,这里将子进程的state设置为TASK_RUNNING;
(3)复制所有的进程信息,包括fs、信号处理函数、信号、内存空间(包括写时复制)等;
(4)调用copy_thread_tls,设置子进程的堆栈信息;
(5)为子进程分配一个pid。
进程的创建过程大致是父进程通过fork系统调用进入内核_ do_fork函数,如下图所示复制进程描述符及相关进程资源(采用写时复制技术)、分配子进程的內核堆栈并对內核堆栈和 thread等进程关键上下文进行初始化,最后将子进程放入就绪队列,fork系统调用返回;而子进程则在被调度执行时根据设置的內核堆栈和thread等进程关键上下文开始执行。
2.execve系统调用
execve作用:进程创建的过程中,子进程先按照父进程复制出来,然后与父进程分离,单独执行一个可执行程序。这要用到系统调用execve。在调⽤execve系统调⽤时,当前的执⾏环境是从⽗进程复制过来的,execve系统调⽤加载完新的可执⾏程序之后已经覆盖了原来⽗进程的上下⽂环境。 execve在内核中帮我们重新布局了新的⽤户态执⾏环境即初始化了进程的用户态堆栈。
正常的一个系统调用都是陷入内核态,再返回到用户态,然后继续执行系统调用后的下一条指令。上文讲到,fork和其他系统调用不同之处是它在陷入内核态之后有两次返回,第一次返回到原来的父进程的位 置继续向下执行,这和其他的系统调用是一样的。在子进程中fork也返回了一次,会返回到一个特定的点——ret_from_fork,通过内核构造的堆栈环境,它可以正常系统调用返回到用户态,所以它稍微特殊一点。同样,execve也比较特殊。当前的可执行程序在执行,执行到execve系统调用时陷入内核态,在内核里面用do_execve加载可执行文件,把当前进程的可执行程序给覆盖掉。当execve系统调用返回时,返回的已经不是原来的那个可执行程序了,而是新的可执行程序。execve返回的是新的可执行程序执行的起点,静态链接的可执行文件也就是main函数的大致位置,动态链接的可执行文件还需 要ld链接好动态链接库再从main函数开始执行。所以fork一般于execve相互配合启动一个新程序。用户态函数库提供了exec函数族
SYSCALL_DEFINE3(execve, const char __user *, filename, const char __user *const __user *, argv, const char __user *const __user *, envp) { return do_execve(getname(filename), argv, envp); }
其调用了do_execve,后者调用了do_execveat_common,最终的工作由__do_execve_file完成。这仍然是很长的一段函数实现,我们选取关键代码:
/* * sys_execve() executes a new program. */ static int __do_execve_file(int fd, struct filename *filename, struct user_arg_ptr argv, struct user_arg_ptr envp, int flags, struct file *file) { char *pathbuf = NULL; struct linux_binprm *bprm; struct files_struct *displaced; int retval; // ... bprm->file = file; // ... retval = prepare_binprm(bprm); // ... retval = copy_strings(bprm->envc, envp, bprm); // ... retval = exec_binprm(bprm); // ... return retval; }
该函数的主要功能是从文件中载入ELF可执行文件并执行。其中exec_binprm实际执行了文件。后者的关键是调用search_binary_handler,这是真正替换进程镜像的地方。
static int exec_binprm(struct linux_binprm *bprm) { pid_t old_pid, old_vpid; int ret; /* Need to fetch pid before load_binary changes it */ old_pid = current->pid; rcu_read_lock(); old_vpid = task_pid_nr_ns(current, task_active_pid_ns(current->parent)); rcu_read_unlock(); ret = search_binary_handler(bprm); if (ret >= 0) { audit_bprm(bprm); trace_sched_process_exec(current, old_pid, bprm); ptrace_event(PTRACE_EVENT_EXEC, old_vpid); proc_exec_connector(current); } return ret; }
execve系统调用的过程总结如下:
(1)execve系统调用陷入内核,并传入命令行参数和shell上下文环境
(2)execve陷入内核的第一个函数:do_execve,该函数封装命令行参数和shell上下文
(3)do_execve调用do_execveat_common,后者进一步调用__do_execve_file,打开ELF文件并把所有的信息一股脑的装入linux_binprm结构体
(4)__do_execve_file中调用search_binary_handler,寻找解析ELF文件的函数
(5)search_binary_handler找到ELF文件解析函数load_elf_binary
(6)load_elf_binary解析ELF文件,把ELF文件装入内存,修改进程的用户态堆栈(主要是把命令行参数和shell上下文加入到用户态堆栈),修改进程的数据段代码段
(7)load_elf_binary调用start_thread修改进程内核堆栈(特别是内核堆栈的ip指针)
(8)进程从execve返回到用户态后ip指向ELF文件的main函数地址,用户态堆栈中包含了命令行参数和shell上下文环境
系统调用可以视为一种特殊的中断,老的32位linux就是采用int 0x80中断指令进入内核,因此自然涉及中断上下文,也就是切换到用户内核栈,同时保存相关的寄存器使得中断结束后能够正常返回。
而fork系统调用特殊之处在于他创建了一个新的进程,且有两次返回。对于fork的父进程来说,fork系统调用和普通的系统调用并无两样。但是对fork子进程来说,需要设置子进程的进程上下文环境,这样子进程才能从fork系统调用后返回。
而对于execve而言,由于execve使得新加载可执⾏程序已经覆盖了原来⽗进程的上下⽂环境,而原来的中断上下文就是保存的是原来的、被覆盖的进程的上下文,因此需要修改原来的中断上下文,使得系统调用返回后能够指向现在加载的这个可执行程序的入口。
3.进程上下文与中断上下文
· 进程上下文
进程则是资源拥有的基本单位,进程切换是由内核实现的,所以进程上下⽂切换过程中最关键的栈顶寄存器sp切换是通过进程描述符的thread.sp实现的,指令指针寄存器ip的切换是在内核堆栈切换的基础上巧妙利⽤call/ret指令实现的。 切换进程需要在不同的进程间切换。但⼀般进程上下⽂切换是嵌套到中断上下⽂切换中的,⽐如前述系统调⽤作为⼀种中断先陷⼊内核,即发⽣中断保存现场和系统调⽤处理过程。其中调⽤了schedule函数发⽣进程上下⽂切换,当系统调⽤返回到⽤户态时会恢复现场,⾄此完成了保存现场和恢复现场,即完成了中断上下⽂切换。
进程的上下文不仅包括了虚拟内存、栈、全局变量等用户空间的资源,还包括了内核堆栈、寄存器等内核空间的状态。因此进程的上下文切换就比系统调用时多了一步:在保存当前进程的内核状态和CPU寄存器之前,需要先把该进程的虚拟内存、栈等保存下来;而加载下一进程的内核态后,还需要刷新进程的虚拟内存和用户栈。
· 中断上下文
为了快速响应硬件的事件,中断处理会打断进程的正常调度和执行,转而调用中断处理程序,响应设备事件。而在打断其他进程时,就需要将进程当前的状态保存下来,这样在中断结束后,进程仍然可以从原来的状态恢复运行,跟进程上下文不同,中断上下文切换并不涉及到进程的用户态。所以,即便中断过程打断了一个正处于用户态的进程,也不需要保存和恢复这个进程的虚拟内存、全局变量等用户态资源。中断上下文,其实只包括内核态中断服务程序执行所必需的状态,包括CPU寄存器、内核堆栈、硬件中断参数等。对同一个CPU来说,中断处理比进程拥有更高的优先级,所以中断上下文切换并不会与进程上下文切换同时发生。同样道理,由于中断会打断正常进程的调度和执行,所以大部分中断处理程序都短小精悍,以便尽可能快的执行结束。
中断是由软硬件触发中断,查找IDT表内相应中断门,SAVE_ALL宏在栈中保存中断处理程序可能会使用的所有CPU寄存器(eflags、cs、eip、ss、esp已由硬件自动保存),并将栈顶地址保存到eax寄存器中来形成。然后中断处理程序调用do_IRQ(pt_regs*)函数,查找irq_desc数组来执行具体的中断逻辑。
4.分析linux系统的一般执行流程
首先是正在运行的用户态进程发生中断(包括异常、系统调用等),CPU完成load cs:rip(entry of a specific ISR),即跳转到中断处理程序入口。
中断上下文切换,具体包括如下几点:
1.swapgs指令保存现场即保存当前CPU寄存器状态。
2.rsp point to kernel stack,加载当前进程内核堆栈栈顶地址到RSP寄存器。
3.save cs:rip/ss:rsp/rflags:将当前CPU关键上下文压入中断进程的内核堆栈,快速系统调用是由系统调用入口处的汇编代码实现的。
此时完成了中断上下文切换,即从中断进程的用户态到内核态。
中断处理过程中或中断返回前调用了schedule函数,其中完成了进程调度算法选择next进程、进程地址空间切换、以及switch_to关键的进程上下文切换等。
switch_to调用了__switch_to_asm汇编代码做了关键的进程上下文切换。将当前进程的内核堆栈切换到进程调度算法选出来的next进程的内核堆栈,
并完成了进程上下文所需的指令指针寄存器状态切换。之后开始运行切换进程。中断上下文恢复,与中断上下文切换相对应。