rovio是一个紧耦合,基于图像块的滤波实现的VIO。
他的优点是:计算量小(EKF,稀疏的图像块),但是对应不同的设备需要调参数,参数对精度很重要。没有闭环,没有mapping thread。经常存在误差会残留到下一时刻。
我试了一些设备,要是精度在几十厘米,设备运动不快的,一般摄像头加一般imu,不是硬件同步就是正常的rostopic 发布的时间,也能达到。
代码主要分为EKF实现的部分,和算法相关的部分,EKF是作者自己写的一个框架。先分析EKF代码
lightweight_filtering
FilterBase.hpp
template<typename Meas>
class MeasurementTimeline{
typedef Meas mtMeas;
//imu测量的数据存在map中,相当于一个buffer,key是时间,value 是加速度或者角速度或者图像金字塔
std::map<double,mtMeas> measMap_;
void addMeas(const mtMeas& meas,const double &t);
}
EKF的整个流程框架
template<typename Prediction,typename... Updates>
class FilterBase: public PropertyHandler{
//imu和图像的两个MeasurementTimeline
MeasurementTimeline<typename mtPrediction::mtMeas> predictionTimeline_;
std::tuple<MeasurementTimeline<typename Updates::mtMeas>...> updateTimelineTuple_;
//加入imu测量值
void addPredictionMeas(const typename Prediction::mtMeas& meas, double t){
if(t<= safeWarningTime_) {
std::cout << "[FilterBase::addPredictionMeas] Warning: included measurements at time " << t << " before safeTime " << safeWarningTime_ << std::endl;
}
if(t<= frontWarningTime_) gotFrontWarning_ = true;
predictionTimeline_.addMeas(meas,t);
}
//图像的MeasurementTimeline
template<int i>
void addUpdateMeas(const typename std::tuple_element<i,decltype(mUpdates_)>::type::mtMeas& meas, double t){
if(t<= safeWarningTime_) {
std::cout << "[FilterBase::addUpdateMeas] Warning: included measurements at time " << t << " before safeTime " << safeWarningTime_ << std::endl;
}
if(t<= frontWarningTime_) gotFrontWarning_ = true;
std::get<i>(updateTimelineTuple_).addMeas(meas,t);
}
//根据传入时间进行EKF的更新
void updateSafe(const double *maxTime = nullptr){
//根据最新的imu测量时间,得到最近的图像测量的时间,nextSafeTime返回的是最新的图像测量时间
bool gotSafeTime = getSafeTime(nextSafeTime);
update(safe_,nextSafeTime);
//清楚safetime之前的数据,但是至少留下一个测量量
clean(safe_.t_);
}
void update(mtFilterState& filterState,const double& tEnd){
while(filterState.t_ < tEnd){
tNext = tEnd;
//要是上一次更新之后,没有新的图像来到,就不要更新了
if(!getNextUpdate(filterState.t_,tNext) && updateToUpdateMeasOnly_){
break; // Don't go further if there is no update available
}
int r = 0;
//参数usePredictionMerge_是不是设置,对应的是EKF中的预测方程的f(x)设置的不一样,看代码就知道
if(filterState.usePredictionMerge_){
r = mPrediction_.predictMerged(filterState,tNext,predictionTimeline_.measMap_);
if(r!=0) std::cout << "Error during predictMerged: " << r << std::endl;
logCountMerPre_++;
} else {
while(filterState.t_ < tNext && (predictionTimeline_.itMeas_ = predictionTimeline_.measMap_.upper_bound(filterState.t_)) != predictionTimeline_.measMap_.end()){
r = mPrediction_.performPrediction(filterState,predictionTimeline_.itMeas_->second,std::min(predictionTimeline_.itMeas_->first,tNext)-filterState.t_);
if(r!=0) std::cout << "Error during performPrediction: " << r << std::endl;
logCountRegPre_++;
}
}
// imu和图像的时间戳不是对齐的,存在偏差,这一段时间的imu也要做EKF预测
if(filterState.t_ < tNext){
r = mPrediction_.performPrediction(filterState,tNext-filterState.t_);
if(r!=0) std::cout << "Error during performPrediction: " << r << std::endl;
logCountBadPre_++;
}
// 图像的更新
doAvailableUpdates(filterState,tNext);
}
}
}
Prediction.hpp
int predictMerged(mtFilterState& filterState, double tTarget,const std::map<double, mtMeas>& measMap) {
switch (filterState.mode_) {
case ModeEKF:
return predictMergedEKF(filterState, tTarget, measMap);
case ModeUKF:
return predictMergedUKF(filterState, tTarget, measMap);
case ModeIEKF:
return predictMergedEKF(filterState, tTarget, measMap);
default:
return predictMergedEKF(filterState, tTarget, measMap);
}
}
virtual int predictMergedEKF(mtFilterState& filterState,const double tTarget, const std::map<double, mtMeas>& measMap)
{
const typename std::map<double, mtMeas>::const_iterator itMeasStart = measMap.upper_bound(filterState.t_);
if (itMeasStart == measMap.end())
return 0;
typename std::map<double, mtMeas>::const_iterator itMeasEnd = measMap.lower_bound(tTarget);
if (itMeasEnd != measMap.end())
++itMeasEnd;
double dT = std::min(std::prev(itMeasEnd)->first, tTarget) - filterState.t_;
if (dT <= 0)
return 0;
// Compute mean Measurement
mtMeas meanMeas;
typename mtMeas::mtDifVec vec;
typename mtMeas::mtDifVec difVec;
vec.setZero();
double t = itMeasStart->first;
for (typename std::map<double, mtMeas>::const_iterator itMeas = next(itMeasStart);
itMeas != itMeasEnd; itMeas++) {
itMeasStart->second.boxMinus(itMeas->second, difVec);
//这个是应该是减的
vec = vec - difVec * (std::min(itMeas->first, tTarget) - t);
t = std::min(itMeas->first, tTarget);
}
vec = vec / dT;
//得到这段时间的imu平均测量
itMeasStart->second.boxPlus(vec, meanMeas);
preProcess(filterState, meanMeas, dT);
meas_ = meanMeas;
//雅可比矩阵的求解
this->jacPreviousState(filterState.F_, filterState.state_, dT);
this->jacNoise(filterState.G_, filterState.state_, dT); // Works for time continuous parametrization of noise
for (typename std::map<double, mtMeas>::const_iterator itMeas =
itMeasStart; itMeas != itMeasEnd; itMeas++) {
meas_ = itMeas->second;
this->evalPredictionShort(filterState.state_, filterState.state_,
std::min(itMeas->first, tTarget) - filterState.t_);
filterState.t_ = std::min(itMeas->first, tTarget);
}
filterState.cov_ = filterState.F_ * filterState.cov_
* filterState.F_.transpose()
+ filterState.G_ * prenoiP_ * filterState.G_.transpose();
filterState.state_.fix();
enforceSymmetry(filterState.cov_);
filterState.t_ = std::min(std::prev(itMeasEnd)->first, tTarget);
postProcess(filterState, meanMeas, dT);
return 0;
}
update.hpp
int performUpdateEKF(mtFilterState& filterState, const mtMeas& meas) {
meas_ = meas;
if (!useSpecialLinearizationPoint_) {
this->jacState(H_, filterState.state_);
Hlin_ = H_;
this->jacNoise(Hn_, filterState.state_);
this->evalInnovationShort(y_, filterState.state_);
} else {
filterState.state_.boxPlus(filterState.difVecLin_, linState_);
this->jacState(H_, linState_);
if (useImprovedJacobian_) {
filterState.state_.boxMinusJac(linState_, boxMinusJac_);
Hlin_ = H_ * boxMinusJac_;
} else {
Hlin_ = H_;
}
this->jacNoise(Hn_, linState_);
this->evalInnovationShort(y_, linState_);
}
if (isCoupled) {
C_ = filterState.G_ * preupdnoiP_ * Hn_.transpose();
Py_ = Hlin_ * filterState.cov_ * Hlin_.transpose()
+ Hn_ * updnoiP_ * Hn_.transpose() + Hlin_ * C_
+ C_.transpose() * Hlin_.transpose();
} else {
Py_ = Hlin_ * filterState.cov_ * Hlin_.transpose() + Hn_ * updnoiP_ * Hn_.transpose();
}
y_.boxMinus(yIdentity_, innVector_);
// Outlier detection // TODO: adapt for special linearization point
//根据方差和residual的乘积是否超多阀值判断outlier
outlierDetection_.doOutlierDetection(innVector_, Py_, Hlin_);
Pyinv_.setIdentity();
Py_.llt().solveInPlace(Pyinv_);
if(outlierDetection_.isOutlier(0)){
LOG(INFO) << "innovation vector: " << innVector_(0) << " , " << innVector_(1);
// LOG(INFO) << "covariance :
" << Py_.block(0,0,2,2);
}
// Kalman Update
if (isCoupled) {
K_ = (filterState.cov_ * Hlin_.transpose() + C_) * Pyinv_;
} else {
K_ = filterState.cov_ * Hlin_.transpose() * Pyinv_;
}
filterState.cov_ = filterState.cov_ - K_ * Py_ * K_.transpose();
if (!useSpecialLinearizationPoint_) {
updateVec_ = -K_ * innVector_;
} else {
filterState.state_.boxMinus(linState_, difVecLinInv_);
updateVec_ = -K_ * (innVector_ + H_ * difVecLinInv_); // includes correction for offseted linearization point, dif must be recomputed (a-b != (-(b-a)))
}
filterState.state_.boxPlus(updateVec_, filterState.state_);
// LOG(INFO) << "updateVec pos vel:
" << updateVec_.block(0,0,6,1).transpose();
return 0;
}
State.hpp
旋转量使用四元数表示是4个自由度,但是旋转只要3个自由度表示,要用李代数表示。
这个是bearing vector的参数表示方式。在tangent space 中表示,这部分我只理解部分。具体的可以参考作者的博士论文,最后一章。
class NormalVectorElement: public ElementBase<NormalVectorElement,NormalVectorElement,2>{
public:
QPD q_;
NormalVectorElement(const V3D& vec): e_x(1,0,0), e_y(0,1,0), e_z(0,0,1){
setFromVector(vec); //就是vec和e_z之间的旋转变换
}
void setFromVector(V3D vec){
const double d = vec.norm();
if(d > 1e-6){
vec = vec/d;
q_ = q_.exponentialMap(getRotationFromTwoNormals(e_z,vec,e_x));
} else {
q_.setIdentity();
}
}
// z轴跟bearing vector之间的旋转变换
static V3D getRotationFromTwoNormals(const V3D& a, const V3D& b, const V3D& a_perp) {
const V3D cross = a.cross(b);
const double crossNorm = cross.norm();
const double c = a.dot(b);
const double angle = std::acos(c);
if (crossNorm < 1e-6) {
//0度
if (c > 0) {
return cross;
} else {//180 度
return a_perp * M_PI;
}
} else {// heta a 旋转轴+旋转角的表示
return cross * (angle / crossNorm);
}
}
V3D getVec() const{
return q_.rotate(e_z);
}
V3D getPerp1() const{
return q_.rotate(e_x);
}
V3D getPerp2() const{
return q_.rotate(e_y);
}
Eigen::Matrix<double,3,2> getN() const {
Eigen::Matrix<double,3,2> M;
M.col(0) = getPerp1();
M.col(1) = getPerp2();
return M;
}
}
rovio
博士论文的最后一章对算法的bearing vector的公式详细的推导了。
这部分主要是算法的部分。
RovioNode.hpp
template<typename FILTER>
class RovioNode{
struct FilterInitializationState {
FilterInitializationState()
: WrWM_(V3D::Zero()),
//使用加速度进行初始化的方向确定
state_(State::WaitForInitUsingAccel) {}
};
void imuCallback(const sensor_msgs::Imu::ConstPtr& imu_msg){
std::lock_guard<std::mutex> lock(m_filter_);
predictionMeas_.template get<mtPredictionMeas::_acc>() = Eigen::Vector3d(imu_msg->linear_acceleration.x,imu_msg->linear_acceleration.y,imu_msg->linear_acceleration.z);
predictionMeas_.template get<mtPredictionMeas::_gyr>() = Eigen::Vector3d(imu_msg->angular_velocity.x,imu_msg->angular_velocity.y,imu_msg->angular_velocity.z);
if(init_state_.isInitialized()){
//
mpFilter_->addPredictionMeas(predictionMeas_,imu_msg->header.stamp.toSec());
updateAndPublish();
} else {
switch(init_state_.state_) {
case FilterInitializationState::State::WaitForInitExternalPose: {
std::cout << "-- Filter: Initializing using external pose ..." << std::endl;
mpFilter_->resetWithPose(init_state_.WrWM_, init_state_.qMW_, imu_msg->header.stamp.toSec());
break;
}
case FilterInitializationState::State::WaitForInitUsingAccel: {
std::cout << "-- Filter: Initializing using accel. measurement ..." << std::endl;
mpFilter_->resetWithAccelerometer(predictionMeas_.template get<mtPredictionMeas::_acc>(),imu_msg->header.stamp.toSec());
break;
}
default: {
std::cout << "Unhandeld initialization type." << std::endl;
abort();
break;
}
}
std::cout << std::setprecision(12);
std::cout << "-- Filter: Initialized at t = " << imu_msg->header.stamp.toSec() << std::endl;
init_state_.state_ = FilterInitializationState::State::Initialized;
}
}
void imgCallback(const sensor_msgs::ImageConstPtr & img, const int camID = 0){
// Get image from msg
cv_bridge::CvImagePtr cv_ptr;
try {
cv_ptr = cv_bridge::toCvCopy(img, sensor_msgs::image_encodings::TYPE_8UC1);
} catch (cv_bridge::Exception& e) {
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
cv::Mat cv_img;
cv_ptr->image.copyTo(cv_img);
if(init_state_.isInitialized() && !cv_img.empty()){
double msgTime = img->header.stamp.toSec();
if(msgTime != imgUpdateMeas_.template get<mtImgMeas::_aux>().imgTime_){
for(int i=0;i<mtState::nCam_;i++){
if(imgUpdateMeas_.template get<mtImgMeas::_aux>().isValidPyr_[i]){
std::cout << " �33[31mFailed Synchronization of Camera Frames, t = " << msgTime << "�33[0m" << std::endl;
}
}
imgUpdateMeas_.template get<mtImgMeas::_aux>().reset(msgTime);
}
imgUpdateMeas_.template get<mtImgMeas::_aux>().pyr_[camID].computeFromImage(cv_img,true);
imgUpdateMeas_.template get<mtImgMeas::_aux>().isValidPyr_[camID] = true;
if(imgUpdateMeas_.template get<mtImgMeas::_aux>().areAllValid()){
mpFilter_->template addUpdateMeas<0>(imgUpdateMeas_,msgTime);
imgUpdateMeas_.template get<mtImgMeas::_aux>().reset(msgTime);
updateAndPublish();
}
}
}
}
ImuPrediction.hpp
公式的推导可以参考的论文,
A Primer on the Differential Calculus of 3D Orientations
template<typename FILTERSTATE>
class ImuPrediction: public LWF::Prediction<FILTERSTATE>{
{
void evalPrediction(mtState& output, const mtState& state, const mtNoise& noise, double dt) const
{
output.aux().MwWMmeas_ = meas_.template get<mtMeas::_gyr>();
output.aux().MwWMest_ = meas_.template get<mtMeas::_gyr>()-state.gyb();
const V3D imuRor = output.aux().MwWMest_+noise.template get<mtNoise::_att>()/sqrt(dt);
const V3D dOmega = dt*imuRor;
QPD dQ = dQ.exponentialMap(dOmega);
for(unsigned int i=0;i<mtState::nMax_;i++){
const int camID = state.CfP(i).camID_;
if(&output != &state){
output.CfP(i) = state.CfP(i);
output.dep(i) = state.dep(i);
}
if(camID >= 0 && camID < mtState::nCam_){
//cam的角速度,在camera 坐标系
const V3D camRor = state.qCM(camID).rotate(imuRor);
//这里的速度取了负号,camera 速度,在camera 坐标系
const V3D camVel = state.qCM(camID).rotate(V3D(imuRor.cross(state.MrMC(camID))-state.MvM()));
oldC_ = state.CfP(i);
oldD_ = state.dep(i);
//公式7的离散公式,一阶积分
output.dep(i).p_ = oldD_.p_-dt*oldD_.getParameterDerivative()*oldC_.get_nor().getVec().transpose()*camVel + noise.template get<mtNoise::_fea>(i)(2)*sqrt(dt);
V3D dm = -dt*(gSM(oldC_.get_nor().getVec())*camVel/oldD_.getDistance()
+ (M3D::Identity()-oldC_.get_nor().getVec()*oldC_.get_nor().getVec().transpose())*camRor)
+ oldC_.get_nor().getN()*noise.template get<mtNoise::_fea>(i).template block<2,1>(0,0)*sqrt(dt);
QPD qm = qm.exponentialMap(dm);
output.CfP(i).set_nor(oldC_.get_nor().rotated(qm));
// WARP corners
if(state.CfP(i).trackWarping_){
bearingVectorJac_ = output.CfP(i).get_nor().getM().transpose()*(dt*gSM(qm.rotate(oldC_.get_nor().getVec()))*Lmat(dm)*(
-1.0/oldD_.getDistance()*gSM(camVel)
- (M3D::Identity()*(oldC_.get_nor().getVec().dot(camRor))+oldC_.get_nor().getVec()*camRor.transpose()))
+MPD(qm).matrix())*oldC_.get_nor().getM();
output.CfP(i).set_warp_nor(bearingVectorJac_*oldC_.get_warp_nor());
}
}
}
// 上面的1-5公式
output.WrWM() = state.WrWM()-dt*(state.qWM().rotate(state.MvM())-noise.template get<mtNoise::_pos>()/sqrt(dt));
output.MvM() = (M3D::Identity()-gSM(dOmega))*state.MvM()-dt*(meas_.template get<mtMeas::_acc>()-state.acb()+state.qWM().inverseRotate(g_)-noise.template get<mtNoise::_vel>()/sqrt(dt));
output.acb() = state.acb()+noise.template get<mtNoise::_acb>()*sqrt(dt);
output.gyb() = state.gyb()+noise.template get<mtNoise::_gyb>()*sqrt(dt);
output.qWM() = state.qWM()*dQ;
//camera 和imu 的外参数
for(unsigned int i=0;i<mtState::nCam_;i++){
output.MrMC(i) = state.MrMC(i)+noise.template get<mtNoise::_vep>(i)*sqrt(dt);
dQ = dQ.exponentialMap(noise.template get<mtNoise::_vea>(i)*sqrt(dt));
output.qCM(i) = state.qCM(i)*dQ;
}
output.aux().wMeasCov_ = prenoiP_.template block<3,3>(mtNoise::template getId<mtNoise::_att>(),mtNoise::template getId<mtNoise::_att>())/dt;
output.fix();
}
}
ImgUpdate.hpp
- Stack all photometric error terms into a vector b, you get b(p)
- Linearize the error around (hat{p}), you get (b(dp) = b(hat{p}) + A(hat{p}) dp)
- Set it to zero and solve for dp, you get the equation $-b(hat{p}) = A(hat{p}) dp $
template<typename FILTERSTATE>
class ImgUpdate: public LWF::Update<ImgInnovation<typename FILTERSTATE::mtState>,FILTERSTATE,ImgUpdateMeas<typename FILTERSTATE::mtState>,ImgUpdateNoise<typename FILTERSTATE::mtState>,
ImgOutlierDetection<typename FILTERSTATE::mtState>,false>{
void preProcess(mtFilterState& filterState, const mtMeas& meas, bool& isFinished){
}
void evalInnovation(mtInnovation& y, const mtState& state, const mtNoise& noise) const{
Eigen::Vector2d pixError;
pixError(0) = static_cast<double>(state.aux().feaCoorMeas_[ID].get_c().x - featureOutput_.c().get_c().x);
pixError(1) = static_cast<double>(state.aux().feaCoorMeas_[ID].get_c().y - featureOutput_.c().get_c().y);
y.template get<mtInnovation::_pix>() = pixError + noise.template get<mtNoise::_pix>();
}
}
world坐标和imu坐标的关系
template<unsigned int nMax, int nLevels, int patchSize,int nCam,int nPose>
class FilterState: public LWF::FilterState<State<nMax,nLevels,patchSize,nCam,nPose>,
PredictionMeas,PredictionNoise<State<nMax,nLevels,patchSize,nCam,nPose>>,0>{
void initWithAccelerometer(const V3D& fMeasInit) {
V3D unitZ(0, 0, 1);
if (fMeasInit.norm() > 1e-6) {
state_.qWM().setFromVectors(fMeasInit, unitZ);
} else {
state_.qWM().setIdentity();
}
}
图像部分主要的代码是
MultilevelPatchAlignement.hpp
这里就是一个高斯牛顿法优化,目标点的位置。
bool align2D(FeatureCoordinates& cOut, const ImagePyramid<nLevels>& pyr, const MultilevelPatch<nLevels,patch_size>& mp,
const FeatureCoordinates& cInit ,const int l1, const int l2, const int maxIter = 10, const double minPixUpd = 0.03){
for(int iter = 0; iter<maxIter; ++iter){
if(std::isnan(cOut.get_c().x) || std::isnan(cOut.get_c().y)){
assert(false);
return false;
}
if(!getLinearAlignEquations(pyr,mp,cOut,l1,l2,A_,b_)){
return false;
}
svd_.compute(A_, Eigen::ComputeThinU | Eigen::ComputeThinV);
if(svd_.nonzeroSingularValues()<2){
return false;
}
update = svd_.solve(b_);
cOut.set_c(cv::Point2f(cOut.get_c().x + update[0],cOut.get_c().y + update[1]),false);
s = update[0]*update[0]+update[1]*update[1];
if(s < min_update_squared){
converged=true;
break;
}
}
}
//这个函数就是上面那个怎么构造图像块像素差作为EKF的更新
bool getLinearAlignEquations(const ImagePyramid<nLevels>& pyr, const MultilevelPatch<nLevels,patch_size>& mp,
const FeatureCoordinates& c, const int l1, const int l2,
Eigen::MatrixXf& A, Eigen::MatrixXf& b){
}
总结
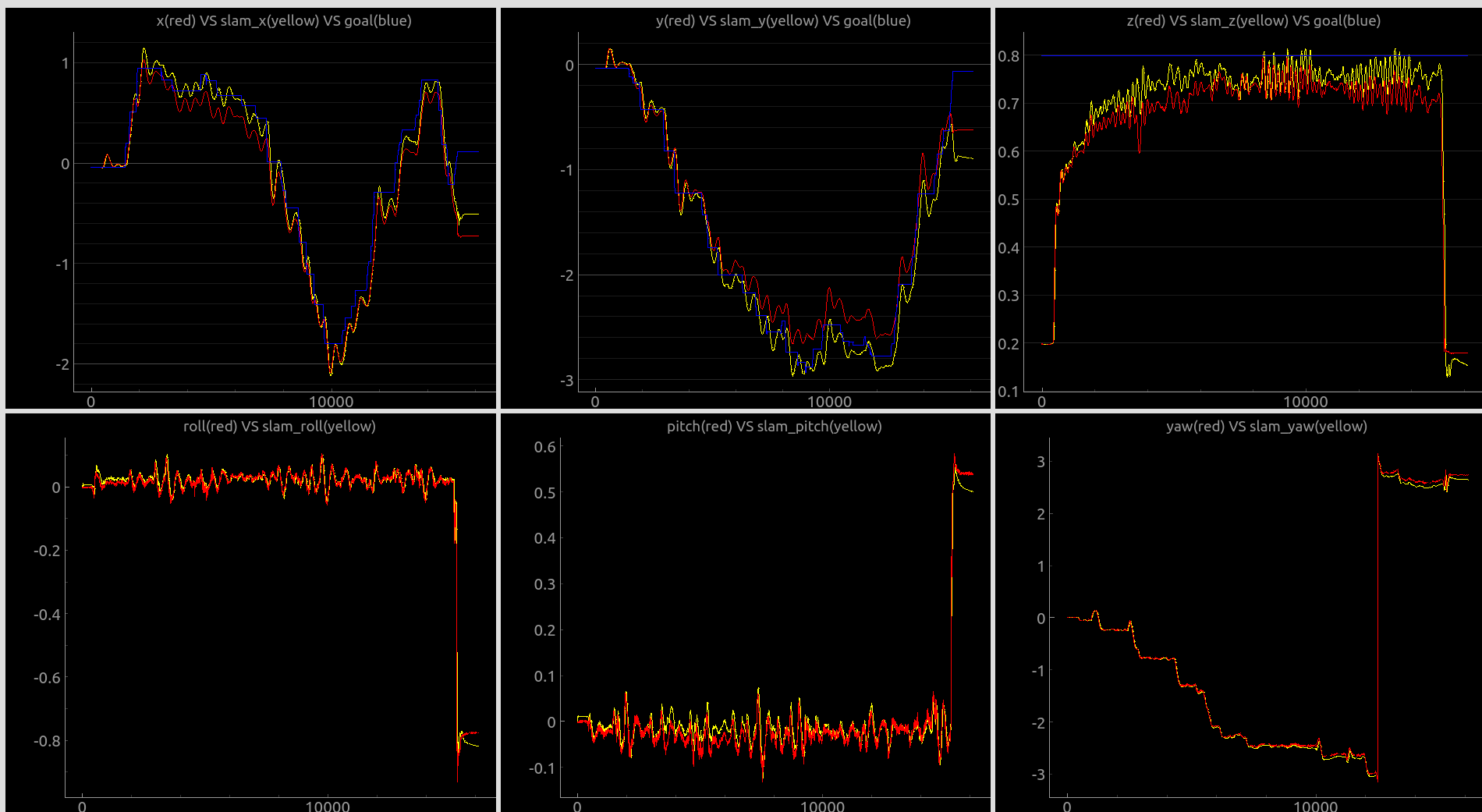
上面是我自己的无人机跑的和真实的运动捕捉系统的对比,是比较好的数据。说明在调的比较好的数据下是可以得到不错的效果。(红色是vrpn,黄色是rovio,蓝色是我给飞机的设定点,红色和黄色的差距还行,有时候比较大)
我使用的是EKF的优化是特征点位置,要是换成IEKF,优化图像块的像素差,可能效果会更好。毕竟这东西是个高度非线性函数。
那个bearing vector的公式我还不会推导,对新增的feature 的initial depth的比较精确的估计对算法精度有帮助,可以维护个地图,
当然在地图中做个local mapping thread, 也是可以的,但是感觉不能很好的和原来的算法耦合起来就没做。
这里最需要改进的应该是特征点的选取,原来算法的效率太低了。而且会发现选取的很多特征点不是那么明显的角点,有更好的选择,不过为了保持距离的限制,妥协了。还有就是速度太慢了。
出现发散的情况,一般就是outlier太多了,没有追踪足够的特征点。因为速度发散,会导致图像更新为了矫正在特征点深度位置上存在巨大的错误速度,把深度设到
无穷远去,这样图像更新就没有作用,进一步导致速度发散。一发散就不可能回来了。