实际项目中一般都直接使用封装好的sift算法。以前为了用sift,都是用的旧版本:opencv-contib-python=3.4.2.17,现在sift专利过期了,新版的opencv直接可以使用sift算法,opencv-python==4.5.1版本测试可以使用。
sift算法理论部分参考前面文章:sift算法理解
关于sift,opencv中主要有这个几个函数:
1.1 sift特征点检测
cv2.SIFT_create()
创建sift对象,官方文档:https://docs.opencv.org/4.5.3/d7/d60/classcv_1_1SIFT.html
sift = cv2.SIFT_create(nfeatures=0, nOctaveLayers=3, contrastThreshold=0.04, edgeThreshold=10, sigma=1.6)
参数:
nfeatures: 需要保留的特征点的个数,特征按分数排序(分数取决于局部对比度)
nOctaveLayers:每一组高斯差分金字塔的层数,sift论文中用的3。高斯金字塔的组数通过图片分辨率计算得到
contrastThreshold: 对比度阈值,用于过滤低对比度区域中的特征点。阈值越大,检测器产生的特征越少。 (sift论文用的0.03,nOctaveLayers若为3, 设置参数为0.09,实际值为:contrastThreshold/nOctaveLayers)
edgeThreshold:用于过滤掉类似图片边界处特征的阈值(边缘效应产生的特征),注意其含义与contrastThreshold不同,即edgeThreshold越大,检测器产生的特征越多(过滤掉的特征越少);sift论文中用的10;
sigma:第一组高斯金字塔高斯核的sigma值,sift论文中用的1.6。 (图片较模糊,或者光线较暗的图片,降低这个参数)
descriptorType:特征描述符的数据类型,支持CV_32F和CV_8U
返回值:sift对象(cv2.Feature2D对象)
cv2.Feature2D.detect()
检测特征关键点,官方文档:https://docs.opencv.org/4.5.3/d0/d13/classcv_1_1Feature2D.html#a8be0d1c20b08eb867184b8d74c15a677
keypoints = cv2.Feature2D.detect(image, mask)
参数:
image:需要检测关键点的图片
mask:掩膜,为0的区域表示不需要检测关键点,大于0的区域检测
返回值:
keypoints:检测到的关键点
cv2.Feature2D.compute()
生成特征关键点的描述符,官方文档:https://docs.opencv.org/4.5.3/d0/d13/classcv_1_1Feature2D.html#a8be0d1c20b08eb867184b8d74c15a677
keypoints, descriptors = cv.Feature2D.compute(image, keypoints)
参数:
image:需要生成描述子的图片
keypoints: 需要生成描述子的关键点
返回值:
keypoints:关键点(原始关键点中,不能生成描述子的关键点会被移除;)
descriptors:关键点对应的描述子
cv2.Feature2D.detectAndCompute()
检测关键点,并生成描述符,是上面detect()和compute()的综合
keypoints, descriptors = cv.Feature2D.detectAndCompute(image, mask)
cv2.drawKetpoints()
绘制检测到的关键点,官方文档:https://docs.opencv.org/4.5.3/d4/d5d/group__features2d__draw.html#ga5d2bafe8c1c45289bc3403a40fb88920
outImage = cv2.drawKeypoints(image, keypoints, outImage, color, flags)
参数:
image:检测关键点的原始图像
keypoints:检测到的关键点
outImage:绘制关键点后的图像,其内容取决于falgs的设置
color:绘制关键点采用的颜色
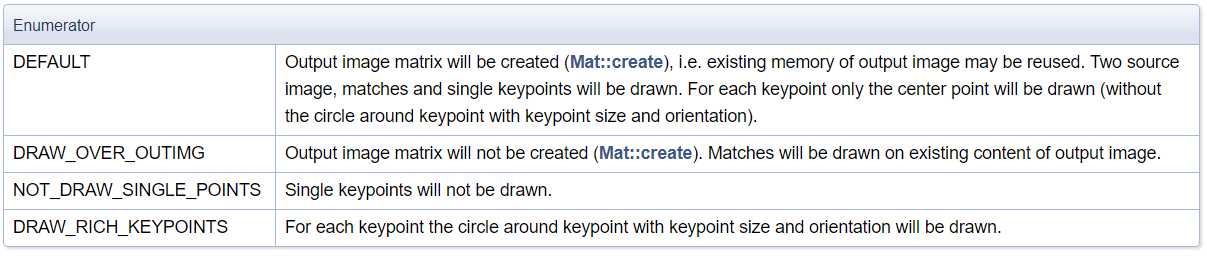
flags:
cv2.DRAW_MATCHES_FLAGS_DEFAULT:默认值,匹配了的关键点和单独的关键点都会被绘制
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS: 绘制关键点,且每个关键点都绘制圆圈和方向
cv2.DRAW_MATCHES_FLAGS_DRAW_OVER_OUTIMG:
cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS:只绘制匹配的关键点,单独的关键点不绘制
flags的原始含义如下:
keypoint
https://docs.opencv.org/4.5.3/d2/d29/classcv_1_1KeyPoint.html#aea339bc868102430087b659cd0709c11
上述检测到的keypoint,在opencv中是一个类对象,其具有如下几个属性:
angle: 特征点的方向,值在0-360
class_id: 用于聚类id,没有进行聚类时为-1
octave: 特征点所在的高斯金差分字塔组
pt: 特征点坐标
response: 特征点响应强度,代表了该点时特征点的程度(特征点分数排序时,会根据特征点强度)
size:特征点领域直径
descriptor
检测点对应的descriptor,是一个128维的向量。
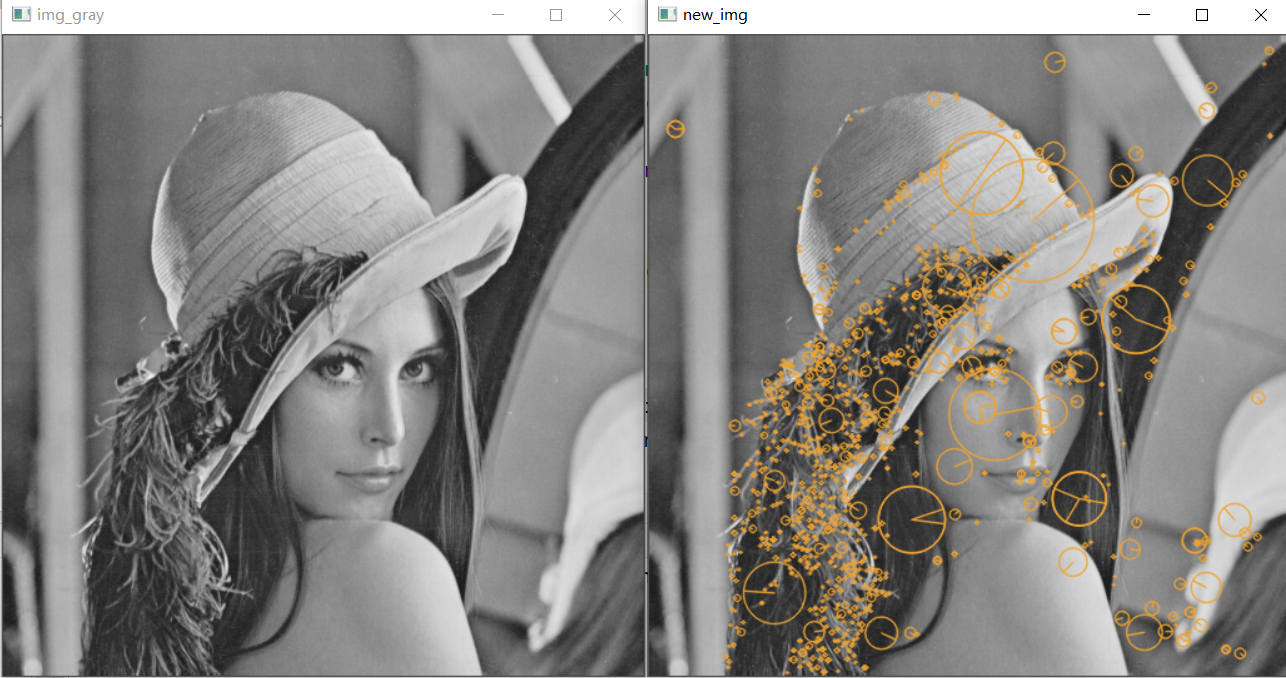
sift简单使用
opencv中sift特征点检测和绘制,使用代码和结果如下:(opencv版本:opencv-python==4.5.1.48)
import cv2
img = cv2.imread(r"./lenna.png")
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT_create(nfeatures=0, nOctaveLayers=3, contrastThreshold=0.04, edgeThreshold=10, sigma=1.6)
keypoints, descriptors = sift.detectAndCompute(img_gray, None)
for keypoint,descriptor in zip(keypoints, descriptors):
print("keypoint:", keypoint.angle, keypoint.class_id, keypoint.octave, keypoint.pt, keypoint.response, keypoint.size)
print("descriptor: ", descriptor.shape)
img = cv2.drawKeypoints(image=img_gray, outImage=img, keypoints=keypoints,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS,
color=(51, 163, 236))
cv2.imshow("img_gray", img_gray)
cv2.imshow("new_img", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
1.2 sift特征点匹配
通过sift得到图片特征点后,一般会进行图片之间的特征点匹配。
1. 匹配方法
opencv中的特征点匹配主要有两种方法:BFMatcher,FlannBasedMatcher:
BFMatcher
官方文档:https://docs.opencv.org/4.5.3/d3/da1/classcv_1_1BFMatcher.html
Brute Froce Matcher: 简称暴力匹配,意思就是尝试所有可能匹配,实现最佳匹配。其继承于类cv2.DescriptorMatcher,
matcher = cv2.BFMatcher(normType=cv2.NORM_L2, crossCheck=False) # 创建BFMatcher对象
FlannBasedMatcher
官方文档:https://docs.opencv.org/4.5.3/dc/de2/classcv_1_1FlannBasedMatcher.html
Flann-based descriptor matcher: 最近邻近似匹配。 是一种近似匹配方法,并不追求完美,因此速度更快。 可以调整FlannBasedMatcher参数改变匹配精度或算法速度。其继承于类cv2.DescriptorMatcher。
FLANN_INDEX_KDTREE = 0 # 建立FLANN匹配器的参数
indexParams = dict(algorithm=FLANN_INDEX_KDTREE, trees=5) # 配置索引,密度树的数量为5
searchParams = dict(checks=50) # 指定递归次数
matcher = cv2.FlannBasedMatcher(indexParams, searchParams) # 建立FlannBasedMatcher对象
indexParams:
algorithm:
FLANN_INDEX_LINEAR: 线性暴力(brute-force)搜索
FLANN_INDEX_KDTREE: 随机kd树,平行搜索。默认trees=4
FLANN_INDEX_KMEANS: 层次k均值树。默认branching=32,iterations=11,centers_init = CENTERS_RANDOM, cb_index =0.2
FLANN_INDEX_COMPOSITE: 随机kd树和层次k均值树来构建索引。默认trees =4,branching =32,iterations =11,centers_init=CENTERS_RANDOM,cb_index =0.2
searchParams:
SearchParams (checks=32, eps=0, sorted=true)
checks: 默认32
eps: 默认为0
sorted: 默认True
2. 绘制匹配
KMatch
官方文档:https://docs.opencv.org/4.5.3/d4/de0/classcv_1_1DMatch.html
上述通过匹配方法得到的匹配,在opencv中都用KMatch类表示,其具有几个属性如下:
queryIdx:查询点的索引
trainIdx:被查询点的索引
distance:查询点和被查询点之间的距离
下面代码中,每个点寻找两个最近邻匹配点,即对于kp1中的每个关键点,在kp2中寻找两个和它距离最近的特征点,所以每个关键点产生两组匹配,即两个KMatch类。kp1相当于索引关键点,对应queryIdx; kp2相当于查询关键点,对应trainIdx。
import cv2
img1 = cv2.imread("iphone1.png")
img2 = cv2.imread("iphone2.png")
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# 采用暴力匹配
matcher = cv2.BFMatcher()
matches = matcher.knnMatch(des1, des2, k=2) # k=2,表示寻找两个最近邻
# 上面每个点寻找两个最近邻匹配点,即对于kp1中的每个关键点,在kp2中寻找两个和它距离最近的特征点,所以每个关键点产生两组匹配,即两个KMatch类
# kp1相当于索引关键点,对应queryIdx; kp2相当于查询关键点,对应trainIdx
for m in matches: # 若寻找三个最近邻点,则m包括三个KMacth
print(m[0].queryIdx, m[0].queryIdx, m[0].distance) # m[0]表示距离最近的那个匹配
print(m[1].queryIdx, m[1].queryIdx, m[1].distance) # m[1]表示距离第二近的那个匹配
参考:https://blog.csdn.net/wphkadn/article/details/85805105
drawMatches()
opencv中drawMatches()能绘制匹配特征点
官方文档:https://docs.opencv.org/4.5.3/d4/d5d/group__features2d__draw.html#ga5d2bafe8c1c45289bc3403a40fb88920
outImg = cv2.drawMatches(img1, keypoints1, img2, keypoints2, matches1to2, outImg, matchColor, singlePointColor, matchesMask, flags)
参数:
img1:图像1
keypoints1:图像1的特征点
img2:图像2
keypoints1:图像2的特征点
matches1to2:图像1特征点到图像2特征点的匹配,keypoints1[i]和keypoints2[matches[i]]为匹配点
outImg: 绘制完的输出图像
matchColor:匹配特征点和其连线的颜色,-1时表示颜色随机
singlePointColor:未匹配点的颜色,-1时表示颜色随机
matchesMask: mask决定那些匹配点被画出,若为空,则画出所有匹配点
flags: 和上述cv2.drawKeypoints()中flags取值一样
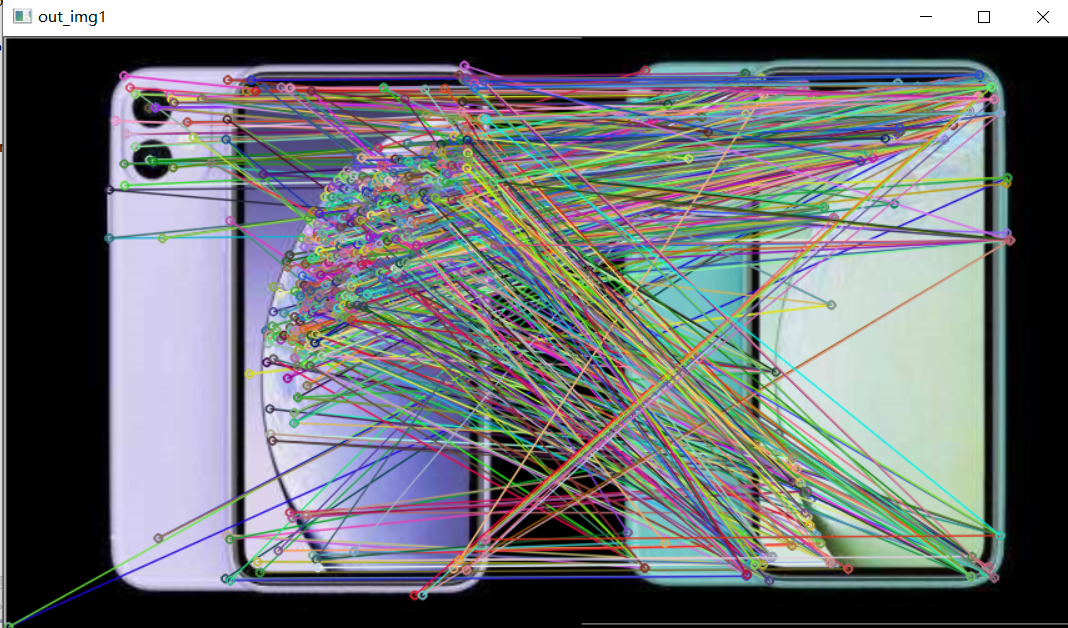
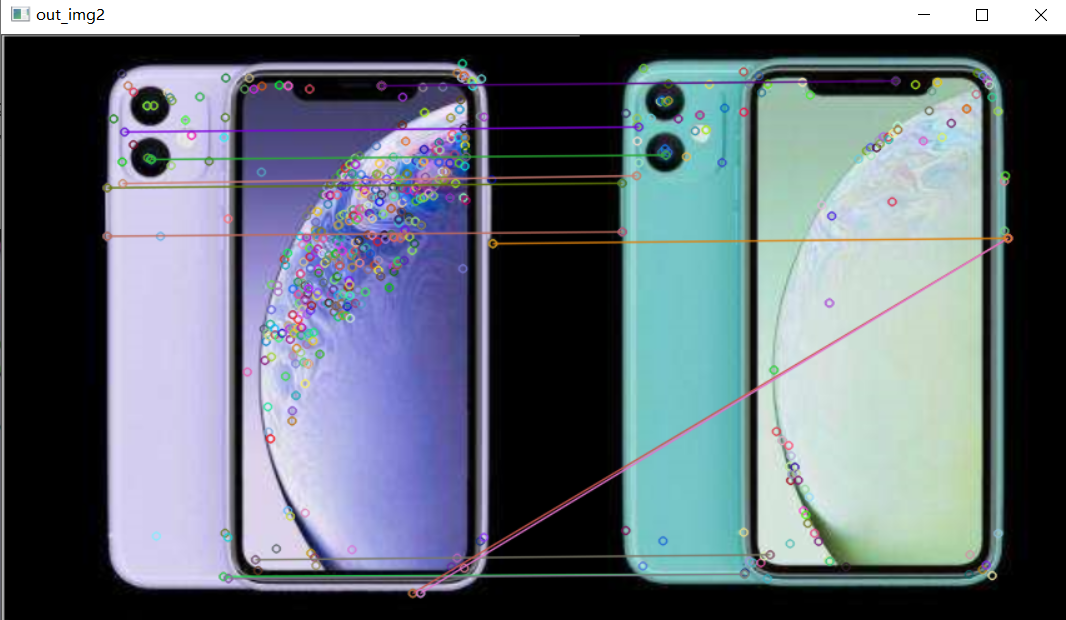
下面代码中对sift提取的特征点进行匹配,采用暴力法匹配,并根据knn近邻法中两个邻居的距离,筛选出了部分匹配点,代码和结果如下:
import cv2
import numpy as np
#自己绘制匹配连线
def drawMatchesKnn_cv2(img1, kp1, img2, kp2, goodMatch):
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
vis = np.zeros((max(h1, h2), w1 + w2, 3), np.uint8)
vis[:h1, :w1] = img1
vis[:h2, w1:w1 + w2] = img2
p1 = [kpp.queryIdx for kpp in goodMatch]
p2 = [kpp.trainIdx for kpp in goodMatch]
post1 = np.int32([kp1[pp].pt for pp in p1])
post2 = np.int32([kp2[pp].pt for pp in p2]) + (w1, 0)
for (x1, y1), (x2, y2) in zip(post1, post2):
cv2.line(vis, (x1, y1), (x2, y2), (0, 0, 255))
cv2.imshow("match", vis)
img1 = cv2.imread("iphone1.png")
img2 = cv2.imread("iphone2.png")
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# 采用暴力匹配
matcher = cv2.BFMatcher()
matches = matcher.knnMatch(des1, des2, k=2) # k=2,表示寻找两个最近邻
# 采用最近邻近似匹配
# FLANN_INDEX_KDTREE = 0 # 建立FLANN匹配器的参数
# indexParams = dict(algorithm=FLANN_INDEX_KDTREE, trees=5) # 配置索引,密度树的数量为5
# searchParams = dict(checks=50) # 指定递归次数
# matcher = cv2.FlannBasedMatcher(indexParams, searchParams) # 建立FlannBasedMatcher对象
# matches = matcher.knnMatch(des1, des2, k=2) # k=2,表示寻找两个最近邻
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
out_img1 = np.zeros((max(h1, h2), w1 + w2, 3), np.uint8)
out_img1[:h1, :w1] = img1
out_img1[:h2, w1:w1 + w2] = img2
out_img1 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, matches, out_img1)
good_match = []
for m, n in matches:
if m.distance < 0.5*n.distance: # 如果第一个邻近距离比第二个邻近距离的0.5倍小,则保留
good_match.append(m)
out_img2 = np.zeros((max(h1, h2), w1 + w2, 3), np.uint8)
out_img2[:h1, :w1] = img1
out_img2[:h2, w1:w1 + w2] = img2
# p1 = [kp1[kpp.queryIdx] for kpp in good_match] # kp1中挑选处的关键点
# p2 = [kp2[kpp.trainIdx] for kpp in good_match] # kp2中挑选处的关键点
out_img2 = cv2.drawMatches(img1, kp1, img2, kp2, good_match, out_img2)
# drawMatchesKnn_cv2(img1, kp1, img2, kp2, good_match)
cv2.imshow("out_img1", out_img1)
cv2.imshow("out_img2", out_img2)
cv2.waitKey(0)
cv2.destroyAllWindows()