日期:2019/3/26
内容:多线程。
一、基本知识
-
线程的定义
线程(thread)是操作系统能够进行运算调度的最小单位。它被包含在进程之中,是进程中的实际运作单位。一条线程指的是进程中一个单一顺序的控制流,一个进程中可以并发多个线程,每条线程并行执行不同的任务。
一个进程至少有一个线程(记为主线程),多开线程称为工作线程。
-
并发特性
当前的进程可以理解为一个主线程,新建的进程称为工作线程。主线程与工作线程交织并发执行。(见2.1的代码实例)
-
线程互斥
多个线程之间有共享资源(shared resource)时会出现互斥现象。
例如设有若干线程共享某个变量,而且都对变量有修改。如果它们之间不考虑相互协调工作,就会产生混乱。比如,线程A和B共用变量x,都对x执行增1操作。由于A和B没有协调,两线程对x的读取、修改和写入操作相互交叉,可能两个线程读取相同个x值,一个线程将修改后的x新值写入到x后,另一个线程也把自己对x修改后的新值写入到x。这样,x只记录后一个线程的修改作用。
- 使用线程时,需要链接pthread库
|
gcc f.c -o f -lpthread |
二、线程的系统调用
2.1 创建线程(pthread_create)
- 原型:int pthread_create(pthread_t *tid, pthread_attr_t *attr, void *(*start_routine)(void *), void *arg);
-
功能:
>>创建一个线程
>>新线程从start_routine开始执行
>>新线程的ID保存在tid指向的位置
- 返回值:成功0,失败非0。(实际是返回-1,但是习惯上使用!=0判断更好)
- 参数解析
|
参数 |
功能 |
|
tid |
该参数是一个指针, 新线程的ID保存在tid指向的位置 pthread_t等同于unsigned long int (8 bytes) |
|
attr |
线程属性。如果为空,则使用缺省的属性值 |
|
start_routine |
该参数是一个函数指针, 新线程从start_routine开始执行 |
|
arg |
提供给start_routine的参数 |
- attr解析(需要用时补充)
-
arg解析
>>对于整型变量
|
int ivalue = 123; void *arg = (void *) ivalue; |
>>字符串(如下代码实例)
>>结构体
|
struct person { char *name; int age; } p; void *arg = (void *) &p; |
- 并发代码实例
|
void *thread_run(void *args) { int i = 5; const char *str = (const char *)(args); while(i--) { printf("%s running... ", str); sleep(1); } return NULL; }
int main() { pthread_t ptid; pthread_create(&ptid, NULL, &thread_run, "subthread");
int i = 5; while(i--) { puts("main thread running..."); sleep(1); } return 0; }
|

2.2 等待线程(pthread_join)
- 原型:int pthread_join(pthread_t tid, void **result);
- 功能:等待线程结束
-
参数:
>>tid: 目标线程的id
>>result: 用于存放线程的计算结果
- 返回值:成功0,失败非0。
- 代码实例1(线程并行计算,全局变量记录结果)
|
#include <stdio.h> #include <pthread.h>
int array[] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9}; int master_res = 0; int worker_res = 0;
void master_run() { int i=0; for(i=0; i<=4; i++) master_res += array[i]; } void *worker_run(void *args) { int i; for(i=5; i<=9; i++) worker_res += array[i]; }
int main() { pthread_t tid; pthread_create(&tid, NULL, &worker_run, NULL); master_run(); pthread_join(tid, NULL); printf("master = %d, worker = %d, total = %d... ", master_res, worker_res, master_res + worker_res); return 0;
}
|

- 代码实例2(线程并行计算,局部变量记录结果)
|
#include <stdio.h> #include <string.h> #include <pthread.h> #define NR_TOTAL 100 #define NR_CPU 4 #define NR_CHILD (NR_TOTAL / NR_CPU) typedef struct { int *array; int start, end; } param; typedef struct { int sum; } result;
int array[NR_TOTAL] = {0};
void *worker_run(void *args) { param *p = (param *)(args); result *res = (result *)malloc(sizeof(result)); int i; int sum = 0; for (i = p->start; i <= p->end; i++) { sum += p->array[i]; } res->sum = sum; return (void *)res; }
int main() { int i; int sum = 0; pthread_t tid[NR_CPU] = {0}; param params[NR_CPU];
for (i = 0; i < NR_TOTAL; i++) array[i] = i + 1;
for (i = 0; i < NR_CPU; i++) { param *p = ¶ms[i]; p->array = array; p->start = i * NR_CHILD; p->end = p->start + NR_CHILD - 1; pthread_create(&tid[i], NULL, &worker_run, (void *)p); }
for (i = 0; i < NR_CPU; i++) { result *res = NULL; pthread_join(tid[i], (void **)(&res)); sum += res->sum; free(res); }
printf("sum = %d ", sum); }
|

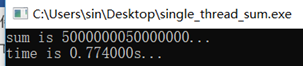
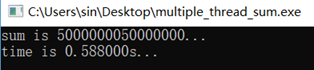
- 代码实例3(多线程求和与单线程求和对比,1亿个数据求和)
运行结果和代码如下。可见单线程与多线程做一亿次加法的时间差不多。自己想了一下原因:代码在阿里云的机器上跑的,买的学生版,CPU是单核的,这种情况下NR_CPU个线程只能轮流使用CPU,本质上就是单线程。而且还多出来线程切换的开销,更不划算。
后来把代码拉到本地运行,本地CPU配置4核4线程,单线程结果稳定在0.77s,多线程结果稳定在0.57-0.58s,说明多线程计算确实是比单线程要快的。
|
单线程 #define SIZE (100000000) static uint32_t array[SIZE] = {0}; static uint64_t sum = 0; clock_t start, end; int main() { start = clock(); uint32_t i = 0; for (i = 0; i < SIZE; i++) array[i] = i + 1; for (i = 0; i < SIZE; i++) sum += array[i]; end = clock(); printf("sum is %lld... ", sum); printf("time is %lfs... ", ((double)end - start) / CLOCKS_PER_SEC); } 输出(sum的值无意义,因为溢出,用于检验2次求和结果是否一致)
本地机器
|



|
多线程 #include <stdio.h> #include <stdlib.h> #include <pthread.h> #include <time.h> #include <stdint.h> #include <string.h> #define SIZE (100000000) #define NR_TOTAL SIZE #define NR_CPU (32) #define NR_CHILD (NR_TOTAL / NR_CPU) typedef struct { uint32_t *array; uint32_t start, end; } param; typedef struct { uint64_t sum; } result; uint32_t array[SIZE] = { 0 }; uint64_t sum = 0; clock_t start, end; param params[NR_CPU]; result res[NR_CPU]; pthread_t tid[NR_CPU];
void *worker_run(void *args) { uint32_t i = 0; uint64_t sum = 0; param *p = (param *)args; result *r = (result *)malloc(sizeof(result)); for(i = p->start; i <= p->end; i++) { sum += p->array[i]; } r->sum = sum; return (void *)r; }
int main() { uint32_t i = 0; start = clock(); for (i = 0; i < SIZE; i++) array[i] = i + 1; for (i = 0; i < NR_CPU; i++) { param *p = ¶ms[i]; p->array = array; p->start = i * NR_CHILD; p->end = p->start + NR_CHILD - 1; pthread_create(&tid[i], NULL, &worker_run, (void *)p); }
for (i = 0; i < NR_CPU; i++) { result *r; pthread_join(tid[i], (void **)&r); sum += r->sum; free(r); } end = clock(); printf("sum is %lld... ", sum); printf("time is %lfs... ", ((double)end - start)/CLOCKS_PER_SEC); }
输出
本地机器
|



2.3 线程互斥(pthread_mutex)
-
原型
>> int pthread_mutex_init(pthread_mutex_t *mutex, pthread_mutexattr_t *attr);
>> int pthread_mutex_destroy(pthread_mutex_t *mutex);
>> int pthread_mutex_lock(pthread_mutex_t *mutex);
>> int pthread_mutex_unlock(pthread_mutex_t *mutex);
-
功能
>> pthread_mutex_init初始化互斥量
>> pthread_mutex_destroy释放互斥量
>> pthread_mutex_lock将互斥量加锁
>> pthread_mutex_unlock将互斥量解锁
-
补充说明
当pthread_mutex_lock()返回时,该互斥锁已被锁定。线程调用该函数让互斥锁上锁,如果该互斥锁已被另一个线程锁定和拥有,则调用的线程将阻塞,直到该互斥锁变为可用为止。
- 返回值:成功0,失败非0(上述4个函数均如此)
-
参数
>>pthread_mutex_t是一个结构体。(具体形式比较复杂,需要时再补充)
>>如果attr等于NULL,则使用缺省的属性进行初始化
- 使用说明
|
开启线程时 |
线程入口函数 |
|
|
- 实例代码(一点存留疑问:这样代码效率跟单线程相比有提高?)
|
static int global = 0; pthread_mutex_t mutex; void *worker_run(void *args) { int i = 0; for(i = 0; i < 1000000; i++) { pthread_mutex_lock(&mutex); global++; pthread_mutex_unlock(&mutex); } return NULL; } int main() { pthread_t tid[3] = { 0 }; pthread_mutex_init(&mutex, NULL); int i = 0; for(i = 0; i < 3; i++) pthread_create(&tid[i], NULL, &worker_run, NULL);
for(i = 0; i < 3; i++) pthread_join(tid[i], NULL); pthread_mutex_destroy(&mutex); printf("global = %d ", global); return 0; }
|

2.4 条件变量(pthread_cond)
-
初始化与销毁
-
原型
>> int pthread_cond_init(pthread_cond_t *cond, pthread_condattr_t *attr);
>> int pthread_cond_destroy(pthread_cond_t *cond);
-
功能
>> pthread_cond_init初始化条件变量
>> pthread_cond_destroy释放条件变量
-
参数
>>如果attr等于NULL,则使用缺省的属性进行初始化
>> pthread_condattr_t是一个结构体,见文献1的blog
>> pthread_cond_t是一个union,见文献1的blog
-
-
等待
- 原型:int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex);
- 功能:阻塞当前线程的运行
- 参数:cond表示当前线程阻塞直到满足cond条件;mutex表示当前线程阻塞时所在的临界区。
- 返回值:成功0,失败非0。
-
唤醒
-
原型
>>int pthread_cond_signal(pthread_cond_t *cond);
>>int pthread_cond_broadcast(pthread_cond_t *cond);
-
功能
>>pthread_cond_signal唤醒阻塞在条件变量上的一个线程
>>pthread_cond_broadcast唤醒阻塞在条件变量上的所有线程
- 返回值:成功0,失败非0.
-
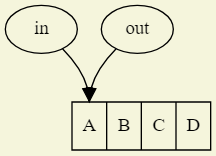
- 共享缓冲区
|
初始状态 |
加入数据 |
缓冲区满 |
非法状态(缓冲区溢出) |
|
|
|
|
|



- 代码实例1——生产者与消费者(条件变量完成同步)
|
#define BUFFER_SIZE (4) #define BUFFER_CAPACITY (BUFFER_SIZE - 1) #define PRODUCE_SIZE (BUFFER_SIZE * 2) #define CONSUME_SIZE (BUFFER_SIZE * 2) typedef unsigned char bool; char buffer[BUFFER_SIZE] = ""; int in = 0; int out = 0; pthread_mutex_t mutex; pthread_cond_t wait_until_full; pthread_cond_t wait_until_empty;
void print_buffer_state() { int i = 0; for(i = 0; i < BUFFER_SIZE; i++) if(buffer[i] != '�') printf("%c ", buffer[i]); printf(" "); } bool buffer_is_empty() { return in == out; } bool buffer_is_full() { return (in + 1) % BUFFER_SIZE == out; } void put_item(char item) { buffer[in] = item; in = (in + 1) % BUFFER_SIZE; } char get_item() { char item = buffer[out]; buffer[out] = '�'; out = (out + 1) % BUFFER_SIZE; return item; }
void *consume_run(void *args) { int i = 0; for(i = 0; i < CONSUME_SIZE; i++) { pthread_mutex_lock(&mutex); while (buffer_is_empty()) pthread_cond_wait(&wait_until_full, &mutex); printf(" consume item = %c ", get_item()); //print_buffer_state(); pthread_cond_signal(&wait_until_empty); //wake up producer pthread_mutex_unlock(&mutex); } return NULL; }
void produce_run() { int i = 0; for(i = 0; i < PRODUCE_SIZE; i++) { pthread_mutex_lock(&mutex); while (buffer_is_full()) pthread_cond_wait(&wait_until_empty, &mutex); char item = 'a' + i; printf("produce item = %c ", item); put_item(item); //print_buffer_state(); pthread_cond_signal(&wait_until_full); //wake up consume pthread_mutex_unlock(&mutex); } }
int main() { pthread_mutex_init(&mutex, NULL); pthread_cond_init(&wait_until_full, NULL); pthread_cond_init(&wait_until_empty, NULL);
pthread_t consume_tid = 0; pthread_create(&consume_tid, NULL, &consume_run, NULL); produce_run(); pthread_join(consume_tid, NULL); return 0; }
|
运行结果
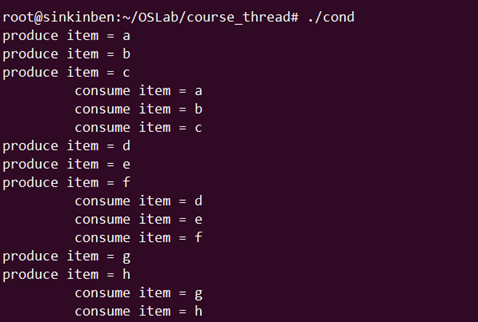

结果分析:
实际上,produce不必等到buffer为空才执行,consume也不必等到buffer为满才执行,produce和consume是并发执行的,所以才会有第二次的运行结果。
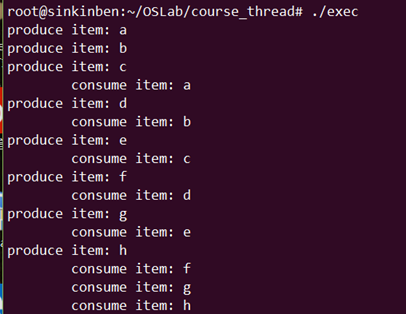
- 代码实例2——生产者与消费者(信号量完成同步)
|
#include <stdio.h> #include <pthread.h> #define BUFF_SIZE 4 #define ITEM_COUNT (BUFF_SIZE * 2) typedef unsigned char bool; typedef struct { int value; pthread_mutex_t mutex; pthread_cond_t cond; } sema_t; char buffer[BUFF_SIZE]; int pin = 0; int pout = 0; sema_t mutex_sema;//threads mutex to access buffer sema_t buffer_notfull_sema;// thread sync sema_t buffer_notempty_sema; bool is_empty() { return pin == pout; } bool is_full() { return ((pin + 1) % BUFF_SIZE) == pout; } char get_item() { char item; item = buffer[pout]; pout = (pout + 1) % BUFF_SIZE; return item; } void put_item(char item) { buffer[pin] = item; pin = (pin + 1) % BUFF_SIZE; } void sema_init(sema_t *sema, int value) { sema->value = value; pthread_mutex_init(&sema->mutex, NULL); pthread_cond_init(&sema->cond, NULL); } //wait //if value<=0 then wait until meet the cond //else value-- void sema_wait(sema_t *sema) { pthread_mutex_lock(&sema->mutex); while (sema->value <= 0) pthread_cond_wait(&sema->cond, &sema->mutex); sema->value--; pthread_mutex_unlock(&sema->mutex); } void sema_signal(sema_t *sema) { pthread_mutex_lock(&sema->mutex); sema->value++; pthread_cond_signal(&sema->cond);//wake up another thread pthread_mutex_unlock(&sema->mutex); } void *consume_run(void *arg) { int i; char item; for(i = 0; i < ITEM_COUNT; i++) { sema_wait(&buffer_notempty_sema); sema_wait(&mutex_sema); printf(" consume item: %c ", get_item()); sema_signal(&mutex_sema); sema_signal(&buffer_notfull_sema); } return NULL; } void *produce_run() { int i; char item; for (i = 0; i < ITEM_COUNT; i++) { sema_wait(&buffer_notfull_sema); sema_wait(&mutex_sema); item = i + 'a'; put_item(item); printf("produce item: %c ", item); sema_signal(&mutex_sema); sema_signal(&buffer_notempty_sema); } return NULL; }
int main() { pthread_t consume_tid; sema_init(&mutex_sema, 1); sema_init(&buffer_notfull_sema, BUFF_SIZE - 1); sema_init(&buffer_notempty_sema, 0); pthread_create(&consume_tid, NULL, consume_run, NULL); produce_run(); pthread_join(consume_tid, NULL); return 0; }
|
运行结果

三、名词解析
- pthread:p的含义是POSIX
- POSIX:Portable Operating System Interface of Unix,可移植操作系统接口。
- mutex:意为互斥体。