转自:https://www.cnblogs.com/electronic/p/11146614.html
通过busybox制作根文件系统可以自定义选项,在制作的根文件系统中添加需要的命令,指定生成的根文件系统到相应的目录下。
一. 根文件系统的获取方式--->官网:
https://busybox.net/downloads/
二. 使用busybox制作根文件系统
第一步 生成基本命令
1. 解压 【 tar -xvf busybox-1.30.0.tar.bz2 】
2. 配置交叉编译工具 打开busybox的顶层目录
(1) Vi Makefile
(2) 修改内容: (不修改内容编译时就要指定这两个变量的值,如 make ARCH=arm CROSS_COMPILE=arm-linux-)
164行 CROSS_COMPILE ?= 改为:CROSS_COMPILE ?= arm-linux- 190行 ARCH ?= $(SUBARCH) 改为:ARCH ?= arm
表示修改交叉工具链为arm-linux- 架构支持arm架构
3. 默认配置:导出配置文件【 make defconfig 】
或者指定输出目录 make defconfig O=../output 指定的输出目录output需要自己事先创建
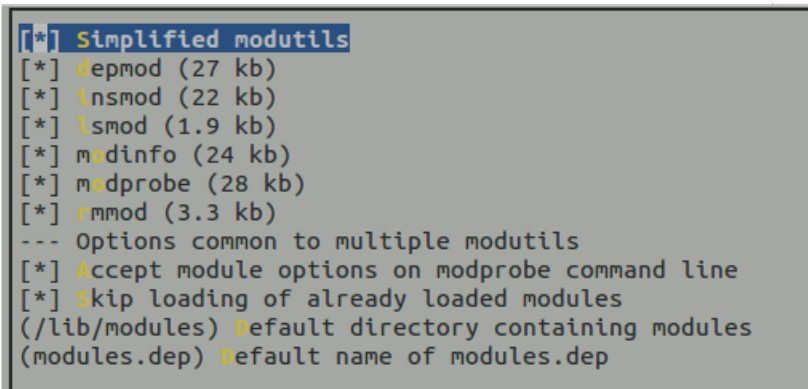
4. 自定义选项配置 图形化配置界面 启动命令:【 make menuconfig 】
(1)添加 insmod rmmod modinfo等命令,在配置界面中找到“Linux Module Utilities”然后选中相应的命令

(2) 配置工具生成到指定的目录
Busybox Setting -------->
Installation Options ("make install" behavior) --->
(./_install) BusyBox installation prefix
5. 编译
$ make 或者 make all -j4 V=1 PC机下linux中多核编译
$ make install
6. 清除编译过程的文件及配置
【make clean 】 清除 .o .bin 文件
【make mrproper】 清除 .o .bin 配置文件
【make distclean】 清除 .o .bin 配置文件
第二步 构建基础文件和目录 -- 根文件系统制作
- 通过 make install 命令把生成的根文件创建在顶层目录 _install下,如果是通过 make defconfig O=../output 导出配置的,则在相应的output目录下进入_install目录

2. 在_install目录下创建根文件系统所需要的目录: _install $ mkdir dev etc home lib mnt proc root sys tmp var -p
3. 在创建的根文件系统的 etc目录下创建inittab文件:_install $ touch etc/inittab
#this is run first except when booting in single-user mode. ::sysinit:/etc/init.d/rcS # /bin/sh invocations on selected ttys ::respawn:-/bin/sh # Start an "askfirst" shell on the console (whatever that may be) ::askfirst:-/bin/sh # Stuff to do when restarting the init process ::restart:/sbin/init # Stuff to do before rebooting ::ctrlaltdel:/sbin/reboot ::shutdown:/sbin/swapoff -a
4. 继续创建目录及文件如下:
(1) _install $ mkdir etc/init.d/ -p
(2) _install $ touch etc/init.d/rcS
(3) _install $ gedit etc/init.d/rcS 在此文件内添加内容如下
#!/bin/sh #This is the first script called by init process /bin/mount -a echo /sbin/mdev>/proc/sys/kernel/hotplug mdev -s
5. _install $ touch etc/fstab
_install $ gedit etc/fstab 文件中添加内容如下:
#device mount-point type options dump fsck order proc /proc proc defaults 0 0 tmpfs /tmp tmpfs defaults 0 0 sysfs /sys sysfs defaults 0 0 tmpfs /dev tmpfs defaults 0 0
6. _install $ touch etc/profile
_install $ gedit etc/profile 文件中添加内容如下:
#!/bin/sh export HOSTNAME=farsight export USER=root export HOME=root export PS1="[$USER@$HOSTNAME W]# " #export PS1="[[�33[01;32m]$USER@[�33[00m][�33[01;34m]$HOSTNAME[�33[00m W]$ " PATH=/bin:/sbin:/usr/bin:/usr/sbin LD_LIBRARY_PATH=/lib:/usr/lib:$LD_LIBRARY_PATH export PATH LD_LIBRARY_PATH
7. 添加动态库支持 // 查看命令在哪个目录下面 which arm-none-linux-gnueabi-gcc
(1) 查看命令依赖的库文件 :arm-none-linux-gnueabi-readelf -d /bin/ls
(2) _install $ cp /opt/gcc-4.9.4/arm-none-linux-gnueabi/sysroot/lib/* lib -ra 表示把相应目录下的所有文件拷贝到制作的根文件系统的 lib目录下

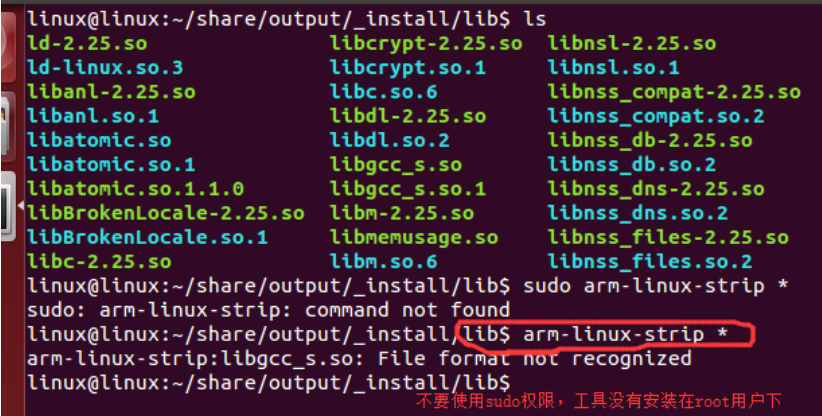
(3) 为了减少体积删除静态库 _install/lib $ rm lib/*.a
(4) 剥离动态库的调试信息,符号表等等 du -h 查看文件大小;瘦身_install/lib $ arm-linux-strip * 注意操作的目录;如果没有权限把所有的文件权限修改 chmod 777 *
然后把制作的根文件系统目录压缩即可,并修改权限


8. 通过 eMMC 挂载根文件系统
首先(使用SD卡启动uboot)通过网络挂载根文件系统,通过tftp服务把uboot和linux内核镜像分别下载到内存0x41000000地址处然后通过mmc命令把uboot和linux内核镜像烧写到eMMC中,把剩余的部分分区设置为根文件系统使用。
Uboot下操作:基于s5p6818 移植
在uboot命令行下把tftp 0x41000000 win-uboot.bin ----> mmc dev 2----> mmc write 0x41000000 0 0x300 把0x41000000地址处写入eMMc中从第0块开始写,写入0x300块;接着在把内核镜像烧写到eMMC中,步骤如上,只是下载和烧写的是uImage。(dev 2表示切换到emmc下,dev 0 表示切换到SD下)
启动系统后操作:
(1)先进入系统后使用分区命令: fdisk /dev/mmcblk0 表示把emmc分区
(2)格式化分区:mkfs.ext2 /dev/mmcblk0p1 # 格式化分区为ext2类型文件系统
(3)目标板挂载文件系统到 /mnt :mount -t ext2 /dev/mmcblk0p1 /mnt
(4)把制作的根文件系统拷到nfs目录下,然后在目标板上把制作的根文件系统压缩包拷贝到挂载点处
(5)解除挂载:umount /mnt
(6)设置uboot的bootargs启动参数
set bootargs “root=/dev/mmcblk0p1 rw rootfstype=ext2 init=/linuxrc console=ttySAC0,115200 ip=192.168.3.132” # 最后的ip为宿主机ip
(7)设置启动地址:
set bootcmd "mmc dev 2;mmc read 0x41000000 500 3000; bootm 0x41000000"
(8)启动开发板 挂载成功
****************************************************************************************************************************
*****************************************************************************************************************************
*****************************************************************************************************************************
ramdisk 制作cramfs (只读文件系统)
1. 按照给的 Makefile 文件制作 ramdisk.img
2. 修改内核配置 make menuconfig
Device Drivers --->
[*] Block devices --->
<*> RAM block device support
(16) Default number of RAM disks
(51200) Default RAM disk size (kbytes)
$ make uImage
$ cp arch/arm/boot/uImage ~/tftpboot
3. FS6818# set bootcmd "tftp 0x41000000 uImage;tftp 0x42000000 ramdisk.img; bootm 0x41000000 0x42000000"
FS6818# set bootargs "root=/dev/ram rw initrd=0x42000040,0x1000000 rootfstype=ext4 init=/linuxrc console=ttySAC0,115200"
通过 fatload 获取 uImage ramdisk.img
1. uboot 也支持文件系统 可以识别 vfat 文件系统
2. FS6818# set bootargs "root=/dev/ram rw initrd=0x42000040,0x1000000 rootfstype=ext4 init=/linuxrc console=ttySAC0,115200"
FS6818# set bootcmd "fatload mmc 0 0x41000000 uImage;fatload mmc 0 0x42000000 ramdisk.img; bootm 41000000 42000000"
1. 启动linux内核 进入命令行(正常挂载根文件系统)
2. fdisk /dev/mmcblk1 分区命令
3. Command (m for help): n
4. Partition number (1-4): 1
5. First cylinder (1-241152, default 1): 600
6. Last cylinder or +size or +sizeM or +sizeK (600-241152, default 241152): 241152
7. Command (m for help): w
8. mkfs.vfat /dev/mmcblk1p1
9. mount -t vfat /dev/mmcblk1p1 /mnt/
10. cp ramdisk.img uImage /mnt/
11. sync
12. umount /mnt/
以上 命令 都是在 开发板 linux 内核中 执行
1. 重启开发板 进入 uboot 命令行 配置uboot 环境变量
FS6818# set bootargs "root=/dev/ram rw initrd=0x42000040,0x1000000 rootfstype=ext4 init=/linuxrc console=ttySAC0,115200"
FS6818# set bootcmd "fatload mmc 0 0x41000000 uImage;fatload mmc 0 0x42000000 ramdisk.img; bootm 41000000 42000000"
2. 执行 boot 命令,开始解析 bootcmd 环境变量
FS6818# boot