
Cholesky分解求系数参考:
[1]冯天祥. 多元线性回归最小二乘法及其经济分析[J]. 经济师,2003,11:129.
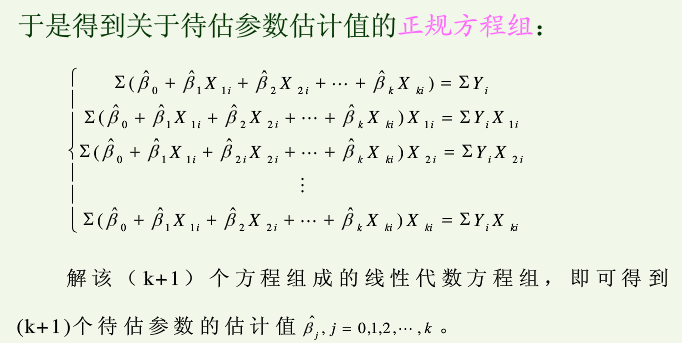
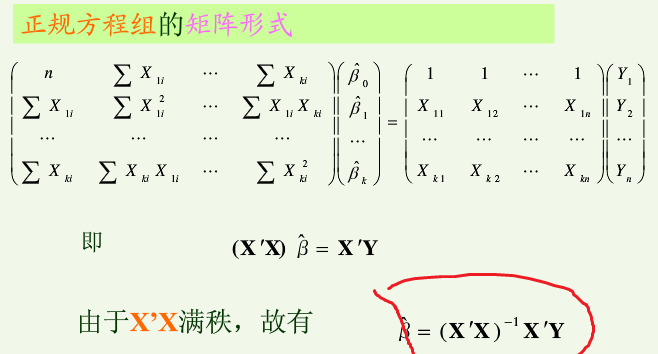
还可以采用最小二乘法来估计参数:


算法设计也可以参考两种系数最终公式设计。
下面的Java代码由网友设计,采用第一种方法计算参数。


1 /** 2 * 多元线性回归分析 3 * 4 * @param x[m][n] 5 * 每一列存放m个自变量的观察值 6 * @param y[n] 7 * 存放随即变量y的n个观察值 8 * @param m 9 * 自变量的个数 10 * @param n 11 * 观察数据的组数 12 * @param a 13 * 返回回归系数a0,...,am 14 * @param dt[4] 15 * dt[0]偏差平方和q,dt[1] 平均标准偏差s dt[2]返回复相关系数r dt[3]返回回归平方和u 16 * @param v[m] 17 * 返回m个自变量的偏相关系数 18 */ 19 public static void sqt2(double[][] x, double[] y, int m, int n, double[] a, 20 double[] dt, double[] v) { 21 int i, j, k, mm; 22 double q, e, u, p, yy, s, r, pp; 23 double[] b = new double[(m + 1) * (m + 1)]; 24 mm = m + 1; 25 b[mm * mm - 1] = n; 26 for (j = 0; j <= m - 1; j++) { 27 p = 0.0; 28 for (i = 0; i <= n - 1; i++) 29 p = p + x[j][i]; 30 b[m * mm + j] = p; 31 b[j * mm + m] = p; 32 } 33 for (i = 0; i <= m - 1; i++) 34 for (j = i; j <= m - 1; j++) { 35 p = 0.0; 36 for (k = 0; k <= n - 1; k++) 37 p = p + x[i][k] * x[j][k]; 38 b[j * mm + i] = p; 39 b[i * mm + j] = p; 40 } 41 a[m] = 0.0; 42 for (i = 0; i <= n - 1; i++) 43 a[m] = a[m] + y[i]; 44 for (i = 0; i <= m - 1; i++) { 45 a[i] = 0.0; 46 for (j = 0; j <= n - 1; j++) 47 a[i] = a[i] + x[i][j] * y[j]; 48 } 49 chlk(b, mm, 1, a); 50 yy = 0.0; 51 for (i = 0; i <= n - 1; i++) 52 yy = yy + y[i] / n; 53 q = 0.0; 54 e = 0.0; 55 u = 0.0; 56 for (i = 0; i <= n - 1; i++) { 57 p = a[m]; 58 for (j = 0; j <= m - 1; j++) 59 p = p + a[j] * x[j][i]; 60 q = q + (y[i] - p) * (y[i] - p); 61 e = e + (y[i] - yy) * (y[i] - yy); 62 u = u + (yy - p) * (yy - p); 63 } 64 s = Math.sqrt(q / n); 65 r = Math.sqrt(1.0 - q / e); 66 for (j = 0; j <= m - 1; j++) { 67 p = 0.0; 68 for (i = 0; i <= n - 1; i++) { 69 pp = a[m]; 70 for (k = 0; k <= m - 1; k++) 71 if (k != j) 72 pp = pp + a[k] * x[k][i]; 73 p = p + (y[i] - pp) * (y[i] - pp); 74 } 75 v[j] = Math.sqrt(1.0 - q / p); 76 } 77 dt[0] = q; 78 dt[1] = s; 79 dt[2] = r; 80 dt[3] = u; 81 } 82 private static int chlk(double[] a, int n, int m, double[] d) { 83 int i, j, k, u, v; 84 if ((a[0] + 1.0 == 1.0) || (a[0] < 0.0)) { 85 System.out.println("fail "); 86 return (-2); 87 } 88 a[0] = Math.sqrt(a[0]); 89 for (j = 1; j <= n - 1; j++) 90 a[j] = a[j] / a[0]; 91 for (i = 1; i <= n - 1; i++) { 92 u = i * n + i; 93 for (j = 1; j <= i; j++) { 94 v = (j - 1) * n + i; 95 a[u] = a[u] - a[v] * a[v]; 96 } 97 if ((a[u] + 1.0 == 1.0) || (a[u] < 0.0)) { 98 System.out.println("fail "); 99 return (-2); 100 } 101 a[u] = Math.sqrt(a[u]); 102 if (i != (n - 1)) { 103 for (j = i + 1; j <= n - 1; j++) { 104 v = i * n + j; 105 for (k = 1; k <= i; k++) 106 a[v] = a[v] - a[(k - 1) * n + i] * a[(k - 1) * n + j]; 107 a[v] = a[v] / a[u]; 108 } 109 } 110 } 111 for (j = 0; j <= m - 1; j++) { 112 d[j] = d[j] / a[0]; 113 for (i = 1; i <= n - 1; i++) { 114 u = i * n + i; 115 v = i * m + j; 116 for (k = 1; k <= i; k++) 117 d[v] = d[v] - a[(k - 1) * n + i] * d[(k - 1) * m + j]; 118 d[v] = d[v] / a[u]; 119 } 120 } 121 for (j = 0; j <= m - 1; j++) { 122 u = (n - 1) * m + j; 123 d[u] = d[u] / a[n * n - 1]; 124 for (k = n - 1; k >= 1; k--) { 125 u = (k - 1) * m + j; 126 for (i = k; i <= n - 1; i++) { 127 v = (k - 1) * n + i; 128 d[u] = d[u] - a[v] * d[i * m + j]; 129 } 130 v = (k - 1) * n + k - 1; 131 d[u] = d[u] / a[v]; 132 } 133 } 134 return (2); 135 } 136 /** 137 * @param args 138 */ 139 public static void main(String[] args) { 140 // TODO Auto-generated method stub 141 /** 142 * 一元回归 143 */ 144 // int i; 145 // double[] dt=new double[6]; 146 // double[] a=new double[2]; 147 // double[] x={ 0.0,0.1,0.2,0.3,0.4,0.5, 148 // 0.6,0.7,0.8,0.9,1.0}; 149 // double[] y={ 2.75,2.84,2.965,3.01,3.20, 150 // 3.25,3.38,3.43,3.55,3.66,3.74}; 151 // SPT.SPT1(x,y,11,a,dt); 152 // System.out.println(""); 153 // System.out.println("a="+a[1]+" b="+a[0]); 154 // System.out.println("q="+dt[0]+" s="+dt[1]+" p="+dt[2]); 155 // System.out.println(" umax="+dt[3]+" umin="+dt[4]+" u="+dt[5]); 156 /** 157 * 多元回归 158 */ 159 int i; 160 double[] a = new double[4]; 161 double[] v = new double[3]; 162 double[] dt = new double[4]; 163 double[][] x = { { 1.1, 1.0, 1.2, 1.1, 0.9 }, 164 { 2.0, 2.0, 1.8, 1.9, 2.1 }, { 3.2, 3.2, 3.0, 2.9, 2.9 } }; 165 double[] y = { 10.1, 10.2, 10.0, 10.1, 10.0 }; 166 SPT.sqt2(x, y, 3, 5, a, dt, v); 167 for (i = 0; i <= 3; i++) 168 System.out.println("a(" + i + ")=" + a[i]); 169 System.out.println("q=" + dt[0] + " s=" + dt[1] + " r=" + dt[2]); 170 for (i = 0; i <= 2; i++) 171 System.out.println("v(" + i + ")=" + v[i]); 172 System.out.println("u=" + dt[3]); 173 }
下面的C++代码由网友提供,采用第二中方法计算系数。
#include<iostream>
#include<fstream>
#include<iomanip>
using namespace std;
void transpose(double **p1,double **p2,int m,int n);
void multipl(double **p1,double **p2,double **p3,int m,int n,int p);
void Inver(double **p1,double **p2,int n);
double SD(double **p1,double **p2,double **p3,double **p4,int m,int n);
double ST(double **p1,int m);
void de_allocate(double **data,int m);
int main() {
int row,col;
char filename[30];
double SDsum,STsum,F,R2;
cout<<"Input original data file:
";
ifstream infile; //打开文件
cin>>filename;
infile.open(filename);
if(!infile) {
cout<<"Opening the file failed!
";
exit(1);
}
infile>>row>>col; //读入文件中的行数和列数
double **matrix=new double*[row]; //为动态二维数组分配内存
double **X=new double*[row];
double **Y=new double*[row];
double **XT=new double*[col];
double **XTX=new double*[col];
double **XTXInv=new double*[col];
double **XTXInvXT=new double*[col];
double **B=new double*[col];
double **YE=new double*[row];
for(int i=0;i<row;i++) {
matrix[i]=new double[col];
X[i]=new double[col];
Y[i]=new double[1];
Y[i]=new double[1];
YE[i]=new double[1];
}
for(int i=0;i<col;i++) {
XT[i]=new double[row];
XTX[i]=new double[2*col];/////////////////////为什么必须分配2*col列空间而不是col?在矩阵求逆时,XTX变增广矩阵,列数变为原来2吧倍,跟求逆算法有关。
XTXInv[i]=new double[col];
XTXInvXT[i]=new double[row];
B[i]=new double[1];
}
for(int i=0;i<row;i++)
for(int j=0;j<col;j++)
infile>>matrix[i][j];
infile.close();
for(int i=0;i<row;i++) { //提取1X和Y数组列
X[i][0]=1;
Y[i][0]=matrix[i][col-1];
for(int j=0;j<col-1;j++)
X[i][j+1]=matrix[i][j];
}
transpose(X,XT,row,col);
multipl(XT,X,XTX,col,row,col);
Inver(XTX,XTXInv,col);
multipl(XTXInv,XT,XTXInvXT,col,col,row);
multipl(XTXInvXT,Y,B,col,row,1);
SDsum=SD(Y,X,B,YE,row,col);
STsum=ST(Y,row);
F=((STsum-SDsum)/(col-1))/(SDsum/(row-col));
R2=1/(1+(row-col)/F/(col-1));
cout<<"输出B:
"; //屏幕输出结果B,SD,ST,F,R2
for(int i=0;i<col;i++)
cout<<setiosflags(ios::fixed)<<setprecision(4)<<B[i][0]<<' ';
cout<<endl;
cout<<"SD="<<SDsum<<';'<<"ST="<<STsum<<';'<<"F="<<F<<';'<<"R2="<<R2<<endl;
ofstream outfile; // 结果写入文件
cout<<"Output file'name:
";
cin>>filename;
outfile.open(filename);
if(!outfile) {
cout<<"Opening the file failed!
";
exit(1);
}
outfile<<"输出B:
";
for(int i=0;i<col;i++)
outfile<<B[i][0]<<' ';
outfile<<endl;
outfile<<setiosflags(ios::fixed)<<setprecision(4)<<"SD="<<SDsum<<';'<<"ST="<<STsum<<';'<<"F="<<F<<';'<<"R2="<<R2<<endl;
outfile<<"Y and YE and Y-YE's value are:
";
for(int i=0;i<row;i++)
outfile<<Y[i][0]<<" "<<YE[i][0]<<" "<<Y[i][0]-YE[i][0]<<endl;
outfile.close();
de_allocate(matrix,row);
de_allocate(X,row);
de_allocate(Y,row);
de_allocate(XT,col);
de_allocate(XTX,col);
de_allocate(XTXInv,col);
de_allocate(XTXInvXT,col);
de_allocate(B,col);
de_allocate(YE,row);
system("pause");
return(0);
}
void de_allocate(double **data,int m) { //释放内存单元
for(int i=0;i<m;i++)
delete []data[i];
delete []data;
}
double ST(double **p1,int m) { //求总离差平方和ST
double sum1=0,sum2=0,Yave=0;
for(int i=0;i<m;i++)
sum1+=p1[i][0];
Yave=sum1/m;
for(int i=0;i<m;i++)
sum2+=(p1[i][0]-Yave)*(p1[i][0]-Yave);
return sum2;
}
double SD(double **p1,double **p2,double **p3,double **p4,int m,int n) { //求偏差平方和SD
double sum1=0,sum2=0;
for(int i=0;i<m;i++) {
sum1=0;
for(int k=0;k<n;k++)
sum1+=p2[i][k]*p3[k][0];
p4[i][0]=sum1;
}
for(int i=0;i<m;i++)
sum2+=(p1[i][0]-p4[i][0])*(p1[i][0]-p4[i][0]);
return sum2;
}
void transpose(double **p1,double **p2,int m,int n) { //矩阵转置
for(int i=0;i<n;i++)
for(int j=0;j<m;j++)
p2[i][j]=p1[j][i];
}
void multipl(double **p1,double **p2,double **p3,int m,int n,int p) { //矩阵相乘
double sum;
for(int i=0;i<m;i++) {
for(int j=0;j<p;j++) {
sum=0;
for(int k=0;k<n;k++)
sum+=p1[i][k]*p2[k][j];
p3[i][j]=sum;
}
}
}
void Inver(double **p1,double **p2,int n) { //求逆矩阵
//初始化矩阵在右侧加入单位阵
for(int i=0;i<n;i++) {
for(int j=0;j<n;j++) {
p1[i][j+n]=0;
p1[i][i+n]=1;
}
}
//对于对角元素为0的进行换行操作
for(int i=0;i<n;i++)
{
while(p1[i][i]==0)
{
for(int j=i+1;j<n;j++)
{
if (p1[j][i]!=0)
{ double temp=0;
for(int r=i;r<2*n;r++)
{temp=p1[j][r];p1[j][r]=p1[i][r];p1[i][r]=temp;}
}
break;
}
}
//if (p1[i][i]==0) return 0;
}
//行变换为上三角矩阵
double k=0;
for(int i=0;i<n;i++) {
for(int j=i+1;j<n;j++) {
k=(-1)*p1[j][i]/p1[i][i];
for(int r=i;r<2*n;r++)
p1[j][r]+=k*p1[i][r];
}
}
//行变换为下三角矩阵
//double k=0;
for(int i=n-1;i>=0;i--) {
for(int j=i-1;j>=0;j--) {
k=(-1)*p1[j][i]/p1[i][i];
for(int r=0;r<2*n;r++)
p1[j][r]+=k*p1[i][r];
}
}
//化为单位阵
for(int i=n-1;i>=0;i--) {
k=p1[i][i];
for(int j=0;j<2*n;j++)
p1[i][j]/=k;
}
//拆分出逆矩阵
for(int i=0;i<n;i++) {
for(int j=0;j<n;j++)
p2[i][j]=p1[i][n+j];
}
}
二元线性回归最小二乘法拟合空间直线。网友提供
#include "stdafx.h"
using namespace std;
using std::cout;
using std::cin;
using std::endl;
#include<math.h>
#include <windows.h>
/*
这是一个控制台程序,任何一个空间直线方程都能以如下的方式表示
x=az+b
y=cz+d
z=z
即
(x-b)/a=(y-d)/c=z/1
*/
#include <vector>
using std::vector;
/* the fitting vaule of this line are: a=2 b=3 c=3 d=0
double z[10]={0.5,0.7,1,1.2,1.5,1.8,2,2.5,2.8,3};
double y[10]={1.5,2.1,3,3.6,4.5,5.4,6,7.5,8.4,9};
double x[10]={4,4.4,5,5.4,6,6.6,7,8,8.6,9};
*/
double x[]={1,1.5,2,2.5,3,3.5,4,4.5,5};
double y[]={-8.1,-7.2,-6.2,-5.5,-4.8,-3.8,-3,-2.2,-1.3};
double z[]={-12,-11.8,-10.7,-9.5,-8.2,-7,-6,-4.5,-3.5};
int _tmain(int argc, _TCHAR* argv[])
{
vector<double>position_z;
vector<double>position_y;
vector<double>position_x;
if ((sizeof(z)/sizeof(double))!=(sizeof(x)/sizeof(double))||(sizeof(z)/sizeof(double))!=(sizeof(y)/sizeof(double))||(sizeof(x)/sizeof(double))!=(sizeof(y)/sizeof(double)))
{
::MessageBox(NULL,"请检查输入数组的长度是否相等","方程无解!",MB_OK);
}
//int ss=sizeof(z)/sizeof(double);
for (int i=0;i<(sizeof(z)/sizeof(double));++i)
{
position_z.push_back(z[i]);
position_y.push_back(y[i]);
position_x.push_back(x[i]);
}
//double m = position_z.size();
//caculate o1,p1,c1,o2,p2,c2
double o1 = 0.0;
double p1 = 0.0;
double x1 = 0.0;
double o2 = 0.0;
double p2 = 0.0;
double x2 = 0.0;
double y1 = 0.0;
double y2 = 0.0;
for (vector<double>::size_type t=0;t< position_z.size();++t)
{
o1 += position_z[t]*position_z[t];
p1 += position_z[t];
x1 += position_x[t]*position_z[t];
o2 += position_z[t];
p2 = position_z.size();
x2 += position_x[t] ;
y2 += position_y[t];
y1 += position_y[t]*position_z[t];
}
//caculate a b
double a = 0.0 ,b = 0.0, c = 0.0, d = 0.0 ;
if ((o1*p2-o2*p1)!= 0)
{
a = (x1*p2 - x2*p1) /(o1*p2-o2*p1);
if (a<1e-10)
{
a=0;
}
b = (x2*o1 - x1*o2) /(o1*p2-o2*p1);
if (b<1e-10)
{
b=0;
}
c = (y1*p2 - y2*p1) /(o1*p2-o2*p1);
if (c<1e-10)
{
c=0;
}
d = (y2*o1 - y1*o2) /(o1*p2-o2*p1);
if (d<1e-10)
{
d=0;
}
}
else
{
::MessageBox(NULL,"OK","方程无解!",MB_OK);
}
cout<<a<<" " <<b<<" "<<c<<" "<<d<<endl;
system ("pause");
return 0;
}