五一时候随便翻书看到了一些关于离散数学图论的模板和算法,大概总结了一下,图论要比数论稍简单一点点。。。
一、
点用边连起来就叫做图,严格意义上讲,图是一种数据结构,定义为:graph=(V,E)。V是一个非空有限集合,代表顶点(结点),E代表边的集合。
二、图的一些定义和概念
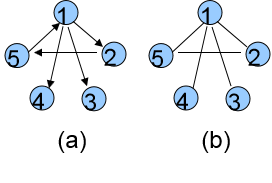
(a)有向图:图的边有方向,只能按箭头方向从一点到另一点。(a)就是一个有向图。
(b)无向图:图的边没有方向,可以双向。(b)就是一个无向图。
结点的度:无向图中与结点相连的边的数目,称为结点的度。
结点的入度:在有向图中,以这个结点为终点的有向边的数目。结点的出度:在有向图中,以这个结点为起点的有向边的数目。
权值:边的“费用”,可以形象地理解为边的长度。
连通:如果图中结点U,V之间存在一条从U通过若干条边、点到达V的通路,则称U、V 是连通的。
回路:起点和终点相同的路径,称为回路,或“环”。
完全图:一个n 阶的完全无向图含有n*(n-1)/2 条边;一个n 阶的完全有向图含有n*(n-1)条边;
稠密图:一个边数接近完全图的图。
稀疏图:一个边数远远少于完全图的图。
强连通分量:有向图中任意两点都连通的最大子图。右图中,1-2-5构成一个强连通分量。特殊地,单个点也算一个强连通分量,所以右图有三个强连通分量:1-2-5,4,3。

- 图的存储结构
1.二维数组邻接矩阵存储
定义int G[101][101];
G[i][j]的值,表示从点i到点j的边的权值,定义如下:

0 1 1 1 0 1 1
G(A)= 1 0 1 1 G(B)= 0 0 1
1 1 0 0 0 1 0
1 1 0 0
- 图的遍历
void dfs(int i) { visited[i] = true; for(int j = 1;j <= num[i] ; j++) if(!visited[g[i][j]]) dfs(g[i][j]); } int main() { memset(visited,false,sizeof(visited)); for(int i=1 ; i<=n ;i++) if(!visited[i]) dfs(i); }
可以看到上面这段遍历整张图的代码中主函数部分,先把图中各点初始化false,每次遍历时先判断两点是否联通将遍历过的点修改为true。
- 欧拉回路
如果一个图存在一笔画,则一笔画的路径叫做欧拉路,如果最后又回到起点,那这个路径叫做欧拉回路。
定理1:存在欧拉路的条件:图是连通的,有且只有2个奇点。
定理2:存在欧拉回路的条件:图是连通的,有0个奇点。
根据一笔画的两个定理,如果寻找欧拉回路,对任意一个点执行深度优先遍历;找欧拉路,则对一个奇点执行DFS,时间复杂度为O(m+n),m为边数,n是点数。
样例输入:第一行n,m,有n个点,m条边,以下m行描述每条边连接的两点。
5 5
1 2
2 3
3 4
4 5
5 1
样例输出:欧拉路或欧拉回路
1 5 4 3 2 1
这种条件在纸上画出大概的一个图就能发现点和线之间的关联。
这也是欧拉回路一个模板
#include<iostream> using namespace std; #define maxn 100 int g[maxn][maxn]; //储存矩阵 int du[maxn]; //记录一个点连了几条边 int circuit[maxn]; //记录欧拉回路 int n,e,circuitpos,i,j,x,y,start; void find_circuit(int i) //记录其中一个点的欧拉回路 { int j; for(j=1;j<=n;j++) if(g[i][j]==1) { g[i][j] = g[j][i] = 0; //记录两个联通点后把他们的之间路径清空 find_circuit(j); } circuit[++circuitpos] = i; } int main() { memset(g,0,sizeif(g)); cin>>n>>e; for (int i=1 ;i<=e ;i++) { cin>>x>>y; g[x][y] = g[y][x] =1; du[x]++; du[y]++; } start = 1; for(i =1 ; i<=n ;i++) if(du[i]%2==1) //偶数点无法判断此路径是否被记录,因此从奇数点
开始找,找到奇数点后代入函数做记录。 start = i; circuitpos = 0; find_circuit(start); for(i=1;i<=circuitpos;i++) cout<<circuit[i]<<endl; }
- 哈密尔顿环
欧拉回路是指不重复地走过所有路径的回路,而哈密尔顿环是指不重复地走过所有的点,并且最后还能回到起点的回路。
#include<iostream> #include<cstring> using namespace std; int start,length,x,n; bool visited[101],v1[101]; int ans[101], num[101]; int g[101][101]; void print() { int i; for (i = 1; i <= length; i++) cout << ' ' << ans[i]; cout << endl; } void dfs(int last,int i) //图用数组模拟邻接表存储,访问点i,last表示上次访问的点 { visited[i] = true; //标记为已经访问过 v1[i] = true; //标记为已在一张图中出现过 ans[++length] = i; for (int j = 1; j <= num[i]; j++) { if (g[i][j]==x&&g[i][j]!=last) //回到起点,构成哈密尔顿环 { ans[++length] = g[i][j]; print(); length--; break; } if (!visited[g[i][j]]) dfs(i,g[i][j]); //遍历与i相关联的所有未访问过的顶点 } length--; visited[i] = false; }
int main()
{
memset(visited,false,sizeof(visited));
memset(v1,false,sizeof(v1));
for (x = 1; x <= n; x++)
//每一个点都作为起点尝试访问,因为不是从任何一点开始都能找过整个图的
if (!v1[x]) //如果点x不在之前曾经被访问过的图里。
{
length = 0;
dfs(x);
}
return 0;
}
- 最短路径
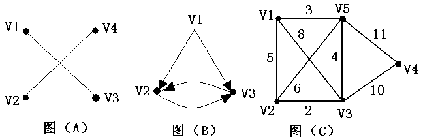
如下图所示,我们把边带有权值的图称为带权图。边的权值可以理解为两点之间的距离。一张图中任意两点间会有不同的路径相连。最短路径就是指连接两点的这些路径中最短的一条。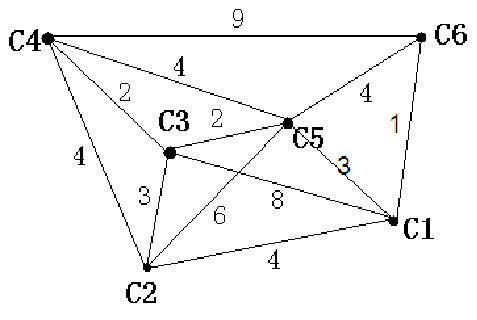
1.弗洛依德l算法 O(N3)
简称Floyed(弗洛伊德)算法,是最简单的最短路径算法,可以计算图中任意两点间的最短路径。Floyed的时间复杂度是O (N3),适用于出现负边权的情况。
算法描述:
初始化:点u、v如果有边相连,则dis[u][v]=w[u][v]。
如果不相连则dis[u][v]=0x7fffffff
For (k = 1; k <= n; k++)
For (i = 1; i <= n; i++)
For (j = 1; j <= n; j++)
If (dis[i][j] >dis[i][k] + dis[k][j])
dis[i][j] = dis[i][k] + dis[k][j];
算法结束:dis[i][j]得出的就是从i到j的最短路径。
主体代码是很好理解的,遍历所有点,i,j两点间的距离比i到k,k到j的距离长,就更新i j两点间的距离。
最短路径问题
【问题描述】
平面上有n个点(n<=100),每个点的坐标均在-10000~10000之间。其中的一些点之间有连线。
若有连线,则表示可从一个点到达另一个点,即两点间有通路,通路的距离为两点间的直线距离。现在的
任务是找出从一点到另一点之间的最短路径。
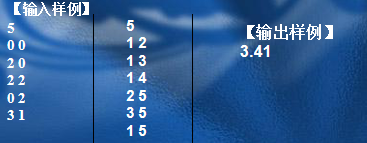
【输入格式】
输入文件为short.in,共n+m+3行,其中:
第一行为整数n。
第2行到第n+1行(共n行) ,每行两个整数x和y,描述了一个点的坐标。
第n+2行为一个整数m,表示图中连线的个数。
此后的m 行,每行描述一条连线,由两个整数i和j组成,表示第i个点和第j个点之间有连线。
最后一行:两个整数s和t,分别表示源点和目标点。
【输出格式】
输出文件为short.out,仅一行,一个实数(保留两位小数),表示从s到t的最短路径长度
#include<cstdio> #include<iostream> #include<cmath> #include<cstring> using namespace std; int a[101][3]; double f[101][101]; int n,i,j,k,x,y,m,s,e; int main() { cin >> n; for (i = 1; i <= n; i++) cin >> a[i][1] >> a[i][2]; cin >> m; memset(f,0x7f,sizeof(f)); //初始化f数组为最大值 for (i = 1; i <= m; i++) //预处理出x、y间距离 { cin >> x >> y; f[y][x] = f[x][y] = sqrt(pow(double(a[x][1]-a[y][1]),2)+pow(double(a[x][2]-a[y][2]),2)); //求(x1,y1),(x2,y2)距离 } cin >> s >> e; for (k = 1; k <= n; k++) //floyed 最短路算法 for (i = 1; i <= n; i++) for (j = 1; j <= n; j++) if ((i != j) && (i != k) && (j != k) && (f[i][k]+f[k][j] < f[i][j])) f[i][j] = f[i][k] + f[k][j]; printf("%.2lf ",f[s][e]); return 0; }
2.Dijkstra算法O (N2)
用来计算从一个点到其他所有点的最短路径的算法,是一种单源最短路径算法。也就是说,只能计算起点只有一个的情况。
Dijkstra的时间复杂度是O (N2),它不能处理存在负边权的情况。dijkstra算法优点在于时间复杂度比弗洛伊德低一个量级,但是不能处理负权值。
算法描述:
设起点为s,dis[v]表示从s到v的最短路径,pre[v]为v的前驱节点,用来输出路径。
a)初始化:dis[v]=∞(v≠s); dis[s]=0; pre[s]=0;
b)For (i = 1; i <= n ; i++)
1.在没有被访问过的点中找一个顶点u使得dis[u]是最小的。
2.u标记为已确定最短路径
3.For 与u相连的每个未确定最短路径的顶点v
if (dis[u]+w[u][v] < dis[v])
{
dis[v] = dis[u] + w[u][v];
pre[v] = u;
}
c)算法结束:dis[v]为s到v的最短距离;pre[v]为v的前驱节点,用来输出路径。
从起点到一个点的最短路径一定会经过至少一个“中转点”(例如下图1到5的最短路径,中转点是2。特殊地,我们认为起点1也是一个“中转点”)。显而易见,如果我们想求出起点到一个点的最短路径,那我们必然要先求出中转点的最短路径(例如我们必须先求出点2 的最短路径后,才能求出从起点到5的最短路径)。
#include<iostream> #include<cstdio> #include<cstring> #include<cmath> using namespace std; int a[101][3]; double c[101]; bool b[101]; double f[101][101]; int n,i,j,k,x,y,m,s,e; double minl; double maxx = 1e30; int main() { cin >> n; for (i = 1; i <= n; i++) cin >> a[i][1] >> a[i][2]; for (i = 1; i <= n; i++) for(j = 1; j <= n; j++) f[i][j] = maxx; //f数组初始化最大值 cin >> m; for (i = 1; i <= m; i++) //预处理x.y间距离f[x][y] { cin >> x >> y; f[x][y] = f[y][x] = sqrt(pow(double(a[x][1]-a[y][1]),2)+pow(double(a[x][2]-a[y][2]),2)); } cin >> s >> e; for (i = 1; i <= n; i++) c[i] = f[s][i]; memset(b,false,sizeof(b)); //dijkstra 最短路 b[s] = true; c[s] = 0; for (i = 1; i <= n-1; i++) { minl = maxx; k = 0; for (j = 1; j <= n; j++) //查找可以更新的点 if ((! b[j]) && (c[j] < minl)) { minl = c[j]; k = j; } if (k == 0) break; b[k] = true; for (j = 1; j <= n; j++) if (c[k] + f[k][j] < c[j]) c[j] = c[k] + f[k][j]; } printf("%.2lf ",c[e]); return 0; }