前面我们安装好了机械臂,接下来我们需要校准工作台坐标,这个步骤非常重要。
图像坐标系到工作台坐标系
AprilTag坐标系
每个AprilTag都有自己的一套坐标系。
遵守右手法则, x轴指向正前方, 向右旋转90度就是y轴, z轴垂直于平面朝上。
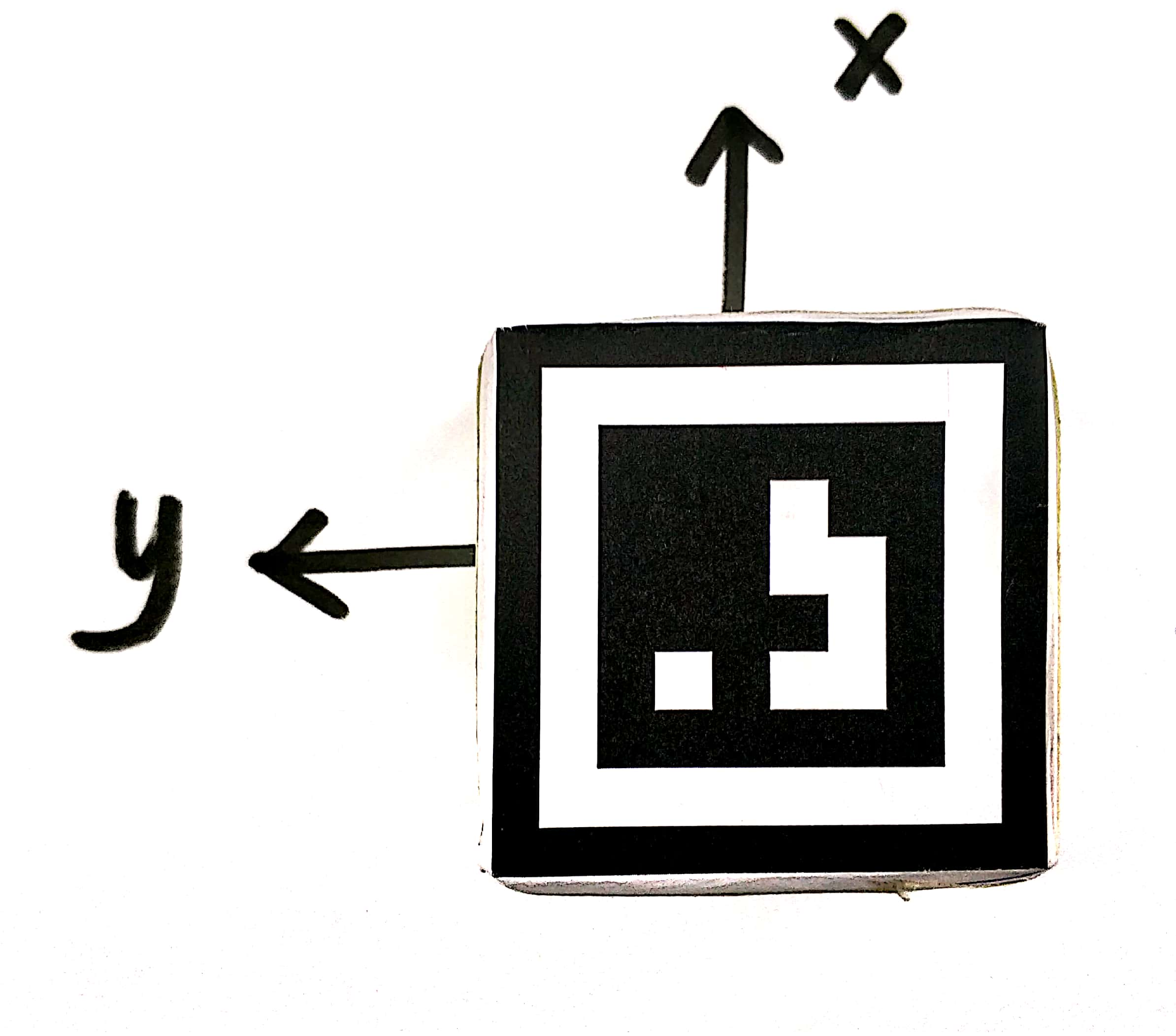
AprilTag在平面中, 位姿只有一个旋转角度。 按照右手法则, 从x旋转到y方向为正方向, 此时 。旋转角度的取值范围是:
因为AprilTag相对于工作台足够大,因此可以忽略摄像头畸变带来的误差。又因为摄像头在工作台中心的正上方, 因此使用小孔成像模型来近似。
我用了一个变焦镜头代替原装摄像头。
下面开始校准
校准程序如下
''' AprilTag识别,把AprilTag中心的坐标转换成工作台坐标系,同时也检测AprilTag的旋转角度 ''' import sensor, image, time, math import utime # 调试模式 # is_debug=True 更多日志输出 is_debug = True # 相机初始化部分 sensor.reset() # 感光芯片重启 sensor.set_pixformat(sensor.RGB565) # 设置图像像素格式为RGB565 sensor.set_framesize(sensor.QQVGA) # 低分辨率 QQVGA: 160 x 120 sensor.set_auto_gain(False) # 必须关闭自动增益 sensor.set_auto_whitebal(False) # 必须关闭自动白平衡 sensor.set_hmirror(True) # 水平方向翻转 sensor.set_vflip(True) # 垂直方向翻转 sensor.skip_frames(time = 2000) clock = time.clock() # OpenMV AprilTag识别函数, 支持同时识别6种Family家族的Tag. # 返回对象信息包含Tag Family的名称, Tag ID tag_families = 0 # 通过或位运算, 来决定是否识别某一种Family的Tag tag_families |= image.TAG16H5 # 这里只用到了TAG16H5家族的TAG16H5 # 定义一些常量 IMG_WIDTH = 160 # 图像的宽度 IMG_HEIGHT = 120 # 图像的高度 OFFSET_X = -0.03 # x方向上的偏移量 OFFSET_Y = -0.05 # y方向上的偏移量 FX = 0.11069547011997175 # x轴方向上的焦距 FY = 0.16256159237060022 # y轴方向上的焦距 def image2workplace(cx, cy): '''将AprilTag的图像坐标系转换到工作台坐标系下''' x, y = cy, cx# 交换cx与cy x = FX * ( 0.5 - x / IMG_HEIGHT + OFFSET_X) y = FY * ( 0.5 - y / IMG_WIDTH + OFFSET_Y) return x, y def calc_tag_offset(tag_radius): ''' [-pi/4, pi/4] ''' tag_degree = math.degrees(tag_radius) # 将弧度转换为角度 current_axes = int(tag_degree / 90) next_axes = (current_axes + 1) ref_degree1 = current_axes * 90 ref_degree2 = next_axes * 90 if tag_degree - ref_degree1 < ref_degree2 - tag_degree: # CW -pi/4 -> 0 offset = -(tag_degree - ref_degree1) else: # CCW 0 -> pi/4 offset = ref_degree2 - tag_degree return math.radians(offset) while(True): clock.tick() img = sensor.snapshot() # 检测画面中的AprilTag for tag in img.find_apriltags(families=tag_families): # 在画面中绘制AprilTag所在的矩形 img.draw_rectangle(tag.rect(), color = (255, 0, 0)) # 绘制AprilTag的中心坐标区域 img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) tag_id = tag.id() # 获取TAG的ID tag_radius = tag.rotation() # 获取TAG的旋转角度 单位是弧度 # 取值范围 0-2pi tag_degree = math.degrees(tag_radius) # 将弧度转换为角度 print('alpha: {}'.format(calc_tag_offset(tag_radius))) # 图像坐标系 转换成工作台坐标系 x, y = image2workplace(tag.cx(), tag.cy()) if is_debug: # 打印日志 print("Tag ID %d, rotation %f (radius) = %f (degrees)" % (tag_id, tag_radius, tag_degree)) print("Tag cx: {} cy:{}".format(tag.cx(), tag.cy())) print("Workspace: x:{} y:{}".format(x, y)) # utime.sleep_ms((200)) print(clock.fps())
首先将FX, FY 都设置为1,将AprilTag物块放在工作台原点,并摆正
然后调整OFFSET_X, OFFSET_Y.
OFFSET_X =-0.03# x方向上的偏移量(百分比)
OFFSET_Y =-0.05# y方向上的偏移量(百分比)
FX =1# x轴方向上的焦距
FY =1# y轴方向上的焦距
观察打印出来的xy, 调整OFFSET_X与OFFSET_Y,使其x y变为0.
print("Workspace: x:{} y:{}".format(x, y))
调整完之后,将AprilTag物块移动到工作台的x=0.06m, y=-0.08m 处。(当然你也可以选择其他点)
FX, FY 是比例系数, 调整FX, FY, 使"Workspace: x:{} y:{}" 的输出为"Workspace: x: 0.06 y: -0.08".
上面都做好之后,需要注意机械臂基座标和工作台坐标的关系。机械臂基座标为最低固定的地方(我是这样取得),
然后就可以进行测试,将程序放入SD卡中,运行,抓取效果不错,记录在此