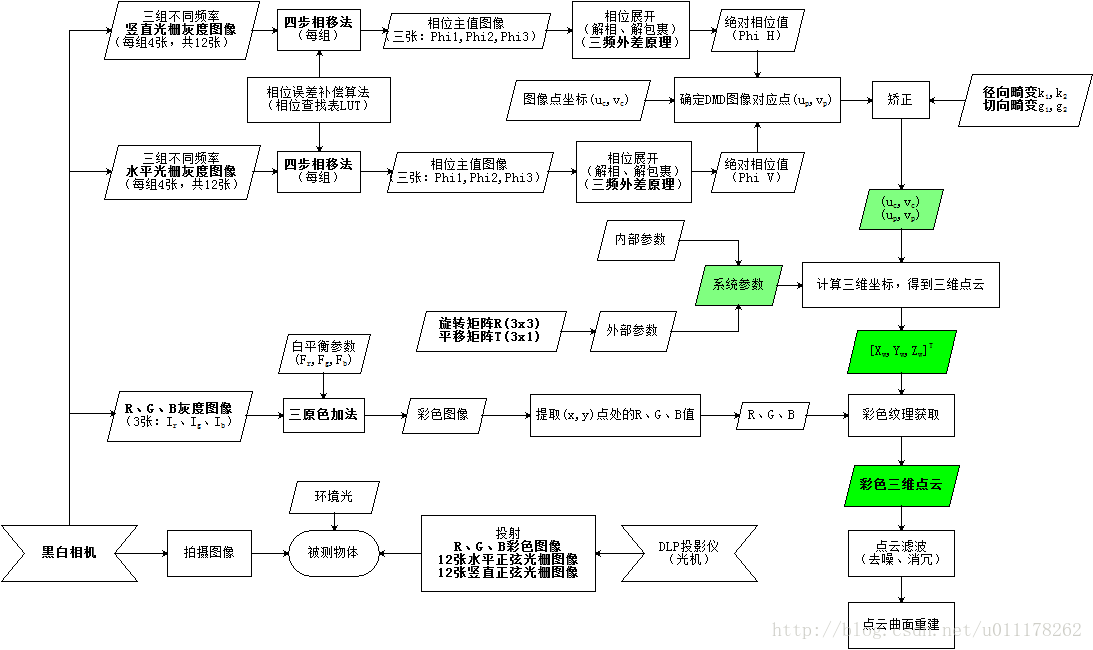
结构光生成与投射
- 水平方向光栅条纹图像12幅:不同频率3组,每组不同相移的4幅图像
- 竖直方向光栅条纹图像12幅:不同频率3组,每组不同相移的4幅图像
结构光生成
由计算机生成并发送到投影仪的光栅图像的灰度分布为:
II(u,v)=a+bcos(θ(u,v)),θ(u,v)=ϕ(u,v)+α
其中,(u,v)表示投影面投影像素单元的坐标,I(u,v)为(u,v)点的灰度值,a和b分别为正弦光栅的直流基波分量(光强背景值)和振幅(调制光强),θ(u,v) 为(u,v)对应的光栅相位,ϕ为待求相位主值,α为相位位移。
相位计算
相位主值计算
相位主值即相对相位值,本文采用标准的四步相移法计算光栅图像的相位主值。
利用频率相同四幅光栅图像计算出一幅相位主值图像,四幅光栅图像的光强表达式为:
I i (u,v)=a+bcos(θ i (u,v)),θ i (u,v)=ϕ(u,v)+π2 i,i∈{0,1,2,3}
则光栅图像的相位主值为:
ϕ(u,v)=arctan(I 3 −I 1 I 0 −I 2 ) ϕ
编程中,一般使用atan2方法:
ϕ(u,v)=atan2(I 3 −I 1 ,I 0 −I 2 ) ϕ(u,v)=atan2(I3−I1,I0−I2)
最终,12幅水平条纹光栅图像计算出3幅水平相位主值图像,12幅竖直条纹光栅图像计算出3幅竖直相位主值图像。
相位展开
相位展开,又称解包裹,计算其绝对相位值。本文利用三频外差原理计算其绝对相位值。 最终,根据上步计算出的3幅水平相位主值图像计算出1幅水平绝对相位值图像,根据上步计算出的3幅竖直相位主值图像计算出1幅竖直绝对相位值图像。
DMD图像坐标计算
根据一个方向的绝对相位值,可以确定DMD图像中的一条垂直线或水平线;则根据水平和垂直两个方向的绝对相位值,可以确定DMD图像中的一个点。
通过竖直和水平光栅条纹的CCD图像(相机图像)中的点(uc,vc) 可以确定DMD图像(投影仪图像)中对应的一个点(u p ,v p ) 该点坐标可用如下公式计算。
参考文献
[1]李中伟. 基于数字光栅投影的结构光三维测量技术与系统研究[D].华中科技大学,2009. [2]达飞鹏,盖绍彦. 光栅投影三维精密测量[M]. 北京:科学出版社,2011.
{
原文:https://blog.csdn.net/u011178262/article/details/73436549
版权声明:本文为博主原创文章,转载请附上博文链接!