感谢提供https://mp.weixin.qq.com/s/CXLM0KC3eYYl6u2NsCpW4g
听到 动态规划 这个响亮的大名你可能已经望而却步,那是因为这个响亮的名字真的真的很具有迷惑性,不像递归、回溯和贪心等等算法一样,其文即其意,而动态规划则不同,很容易望文生义,真可谓害人不浅,今天我就带大家一起扒一扒 动态规划 的裤子。
第一点,大家在学习动态规划时切忌望文生义,因为其名字与其思想八竿子打不着。你可以自己起一个能让自己记住其思想的名字更好,比如递推公式法,状态转移方程法等等。
第二点,与其说动态规划是一个算法,还不如说是解决问题的方法论。
第三点,动态规划的一般形式就是求最优值,比如最长公共子序列、最大子段和、最优二叉搜索树等等。
动态规划的基本思想
动态规划算法与分治法类似,其基本思想就是将待求解问题分解成若干子问题,先求解子问题,然后从这些子问题的解得到原问题的解。与分治法不同的是,适合动态规划法求解的问题,经分解得到的子问题往往不是相互独立的。若用分治法来解这类问题,则分解得到的子问题数目太多,以至于最后解决原问题需要耗费指数时间。然而,不同子问题的数目常常只有多项式量级。在用分治法求解时,有些子问题被重复结算了很多次。如果我们能够保存已经解决的子问题的答案,而在需要时再找出已求得的答案,这样就可以避免大量的重复计算,从而得到多项式时间复杂度的算法。为了达到次目的,可以用一个表来记录所有已解决的子问题的答案,不管该子问题以后是否被用到,只要它被计算过,就将其结果填入表中。这就是动态规划的基本思想。
你看了肯定没有抓住重点,那就多读几遍,不过下面早已备好:
- 将待求解问题分解成若干子问题,先求解子问题,然后从这些子问题的解得到原问题的解;
- 经分解得到的子问题往往不是相互独立的;
- 保存已经解决的子问题的答案,避免重复计算。
这就是要点,务必熟记于心,虽然将来我们会看到各种各样的例子都是印证。
动态规划的基本要素
动态规划算法就是将待求解问题分解成若干子问题,先求解子问题并保存子问题的答案避免重复计算,然后从这些子问题的解得到原问题的解。而如何断定一个问题是否可以用动态规划来解决,就需要掌握动态规划的两个基本要素,「最优子结构性质」 和「重叠子问题性质」 。
最优子结构性质
设计动态规划算法的第一步通常是要刻画最优解的结构。当问题的最优解包含了其子问题的最优解时,称该问题具有最优子结构性质 。问题的最优子结构性质提供了该问题可用动态规划求解的重要线索。
例如,最短路径问题有如下的最优子结构:
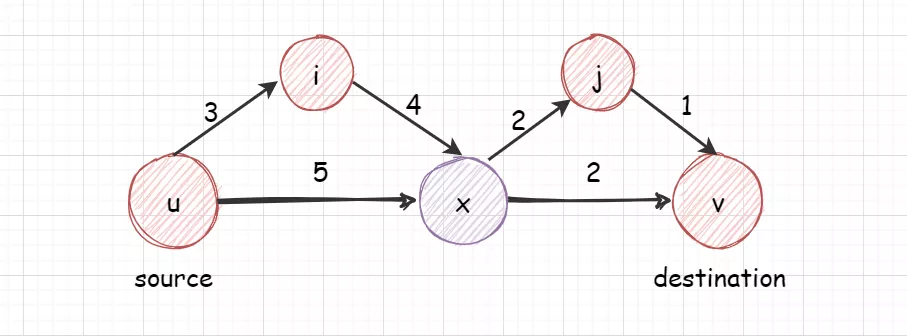
结点 x 是从源结点 u 到目标结点 v 的最短路径上的结点,则源结点 u 到目标结点 v 的最短路径 7 就等于从源结点 u 到结点 x 的最短路径 5 加上从结点 x 到目标结点 v 的最短路径 2 的和。源结点 u 到目标结点 v 的最短路径就是要求解的最优解,源结点 u 到结点 x 的最短路径和从结点 x 到目标结点 v 的最短路径均为子问题的最优解,而问题的最优解包含了其子问题的最优解,则该问题具有最优子结构性质。
弗洛伊德算法( Floyd–Warshall Algorithm)和贝尔曼-福特算法(Bellman - Ford algorithm)都是解决单源点最短路径的经典动态规划算法,以后有机会定会给大家分享。
但是最长路径问题就不具有最优子结构性质,注意这里的最长路径指的是两个结点间的最长简单路径(即不存在环的路径)。盗用算法导论中的一张无权无向图就可以说明。

从结点 u 到结点 v 有两条最长路径,分别为 u → s → v 和 u → t → v ,但是与最短路径问题不同,这些最长路径不具有最优子结构性质。比如,从结点 u 到结点 v 有两条最长路径 u → s → v 并不等于从 u 到 s 的最长路径 u → t → v → s 与从 s 到 v 的最长路径 s → u → t → v 的加和。(更多最优子结构的例子,请持续关注景禹,笔芯)。

重叠子问题性质
在用递归算法自顶向下解决一个问题时,每次产生的子问题并不总是新问题,有些子问题被反复计算多次。动态规划正是利用了这种子问题的重叠性质,对每个子问题只解一次,而后将其解保存到一个表格中,当再次需要解此子问题时,只是简单地用常数时间查看一下结果。
光说不练假把式,重叠子问题谁不知道呀?
但还是要说一说,再练!!!
动态规划经分解得到的子问题往往不是相互独立的 。如果经分解得到的子问题的解之间相互独立,比如二分查找(Binary Search)经分解得到的子问题之间相互独立,不存在 重叠子问题,所以不适合用 动态规划,更适合分治算法。而斐波那契数列问题则更适用于动态规划,虽然严格意义上斐波那契数列的解决并不是动态规划的普适应用(动态规划的一般形式是求最优值!),但是对于我们理解动态规划的 「重叠子问题性质」 大有裨益!
关于斐波那契数列的递归实现,信手拈来:
1 int fib(int n) 2 { 3 if(n <= 1){ 4 return n; 5 } 6 return fib(n-1) + fib(n-2); 7 }
虽然递归的代码简单易懂,但却极其低效。先不说这种递归实现造成栈空间的极大浪费,就仅仅该算法的时间复杂度已属于指数级别O(2^n)了。
再来看看 时的递归树:
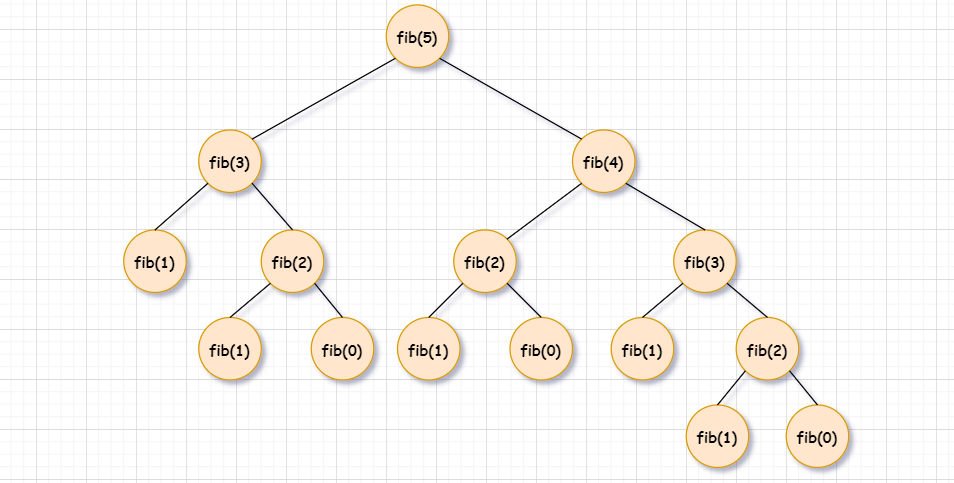
可以看到,fib(3) 被调用了两次,如果我们已经保存 fib(3) 的值,我们就可以复用保存的 fib(3) 的值,而不是重新计算,fib(2) 也是同样的道理。
保存重叠子问题的解(也就是 fib(3))有以下两种方式:
方法一:DP table(自底向上)动态规划
DP table 就是动态规划算法自底向上建立的一个表格,用于保存每一个子问题的解,并返回表中的最后一个解。比如斐波那契数,我们先计算 fib(0),然后 fib(1),然后 fib(2),然后 fib(3),以此类推,直至计算出 fib(n)。
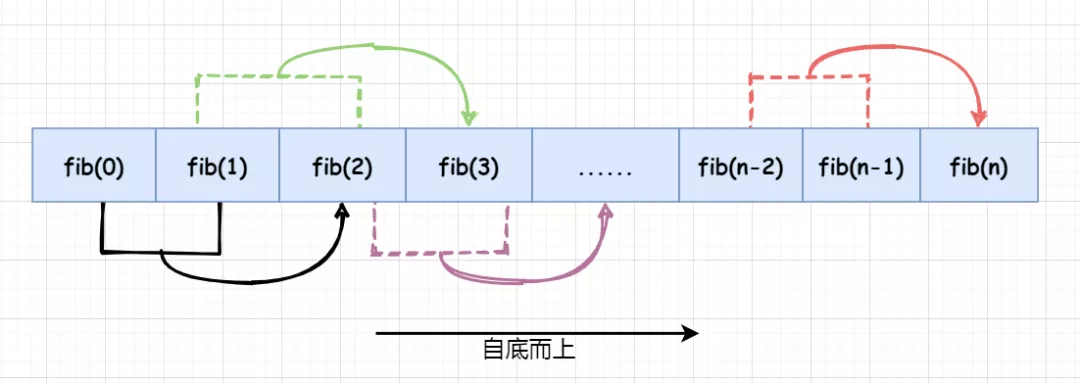
比如我们计算 fib(5),先由 fib(0) + fib(1) 得到 fib(2),再由 fib(1) + fib(2) 得到 fib(3),再由 fib(2) + fib(3) 得到 fib(4),最后由 fib(3) + fib(4) 得到 fib(5)。
也就是说,我们只需要存储子问题的解,而不需要重复计算子问题的解,对上图进行简化:
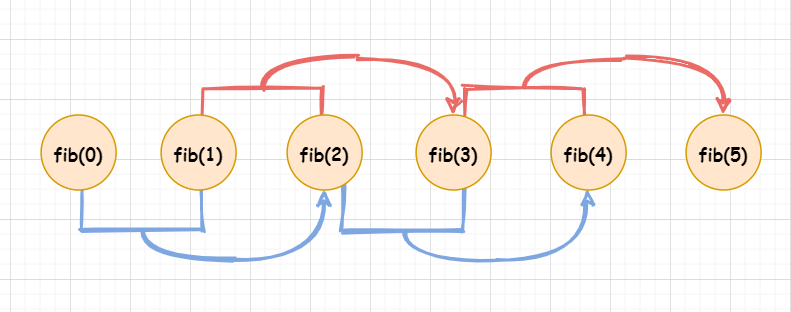
此图也就是动态规划法求斐波那契数的过程图。其实就实现而言,其实质上是斐波那契数的迭代实现,所以我之前说斐波那契数严格意义上不是动态规划所解决的问题,但是其对于我们理解「重叠子问题性质」还有很有帮助的。
对斐波那契数列问题,动态规划法(自底而上)保存重叠子问题的解的更一般形式为:
实现起来更是 so easy !
1 int fib(int n) 2 { 3 f[1] = 1; 4 f[2] = 1; 5 for (int i = 3; i <= n; i++) 6 f[i] = f[i-1] + f[i-2]; 7 return f[n]; 8 }
请不要问我上面的代码空间复杂度明明可以用 就实现,为什么我要写成 。因为希望大家理解动态规划法的一个核心思想,保存子问题的解,DP table 会保存所有子问题的解 。你期望的可能是下面这样,那也 OK。
1 int fib(int n) 2 { 3 int result = 0; 4 int fib0 = 0; 5 int fib1 = 1; 6 for (int i = 2; i <= n; i++){ 7 result = fib0 + fib1; 8 fib0 = fib1; 9 fib1 = result; 10 } 11 return result; 12 }
方法二:备忘录方法(自顶向下)--记忆化搜索
备忘录方法是动态规划算法的变形。与动态规划方法一样,备忘录方法用表格保存已解决的子问题的答案,在下次需要解此子问题时,只要简单地查看该子问题的答案,而不必重新计算。
与动态规划方法不同的是,备忘录方法的递归方式是自顶向下的,而动态规划算法则是自底向上递归的。因此,备忘录方法的控制结构与直接递归方法的控制结构相同,区别在于备忘录方法为每个解过的子问题建立了备忘录以备需要时查看,避免相同子问题的重复求解。
备忘录方法为每一个子问题建立一个记录项,初始时,该记录项存入一个特殊的值,表示该子问题尚未被解决(比如下面斐波那契数的备忘录版本中将其设置为 -1)。在求解过程中,对每个待求解的子问题,首先查看其相应的记录项。若记录项中存储的是初始化时存入的特殊值,则表示该子问题是第一次遇到,此时计算出该子问题的解,并保存在相应的记录项中,以备以后查看。若记录项中存储的已不是初始化时存入的特殊值,则表示该子问题已被计算过,其相应的记录项存储的是该子问题的答案。此时,只要从记录项中取出该子问题的答案即可,而不必重新计算。
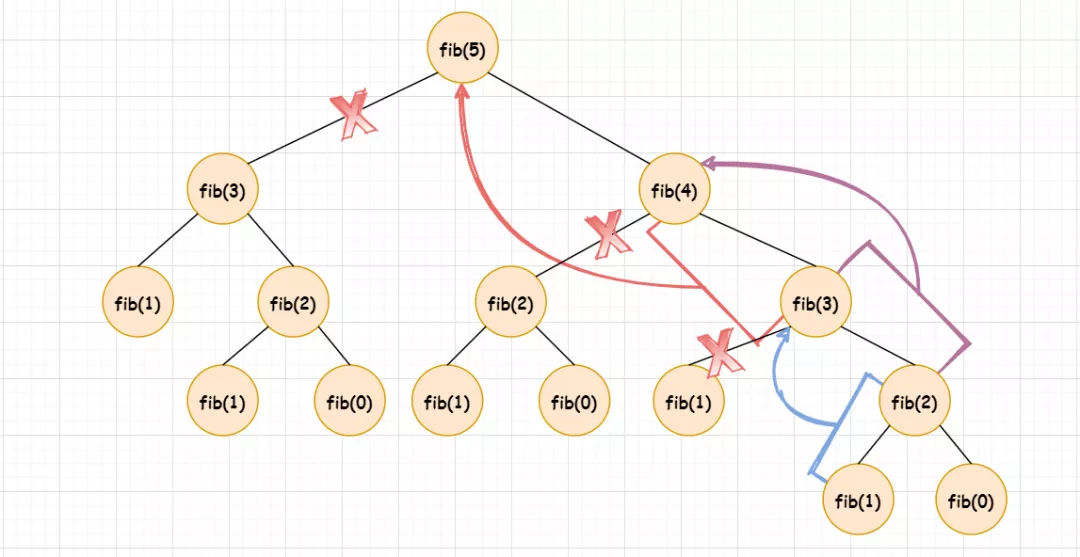
以求解 fib(5) 为例,为求解 fib(5),要先求解 fib(4),要求解 fib(4),要先求解 fib(3),要求解 fib(2),则要先求解 fib(1) 和 fib(0),fib(1) = 1,fib(0) = 0,则直接返回,依次返回 fib(2) = 1,fib(3) = fib(2) + fib(1) = 2,fib(4) = fib(3) + fib(2) = 3,fib(5) = fib(4) + fib(3) = 5。
PS:递归调用可理解为入栈操作,而返回则为出栈操作。
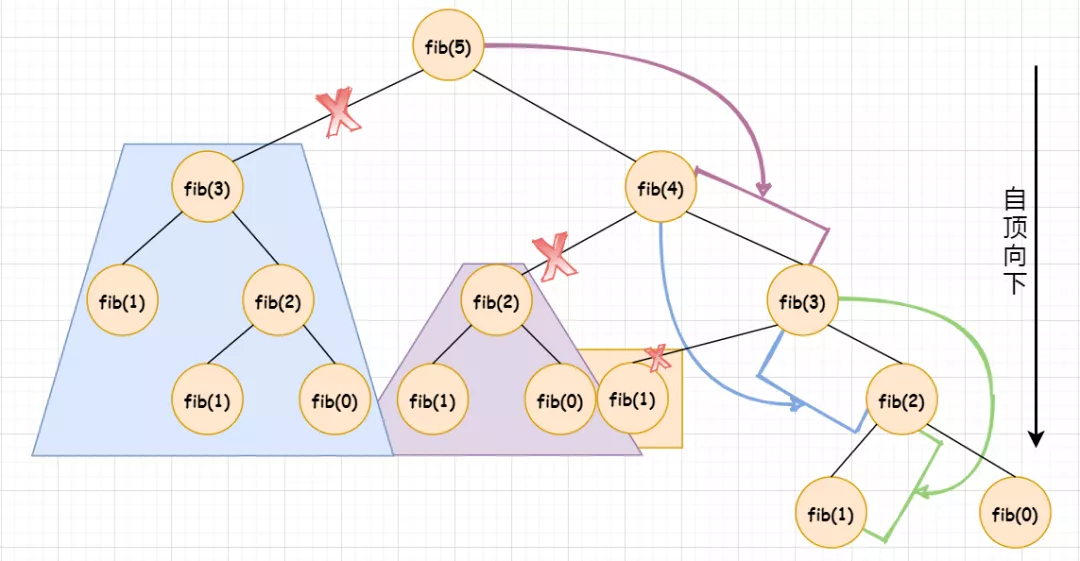
由 fib(5) 的递归树,可以发现,备忘录方法与动态规划方法一样,把一颗存在巨量冗余的递归树进行剪枝,改造成了一颗不存在冗余的递归图。重叠子问题的解都被保存了起来,用到时直接查表即可,而不需要重新计算,这一点备忘录与动态规划方法一样。不同的是,备忘录方法是自顶向下对问题求解,与直接递归方法的控制结构相同,而动态规划方法是自底向上对问题求解,与迭代实现方式的结构一致。
以 fib(5) 为例,备忘录方法(自顶向下)最终就是这样:
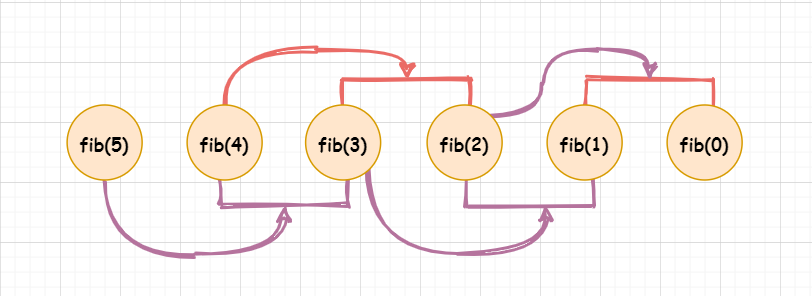
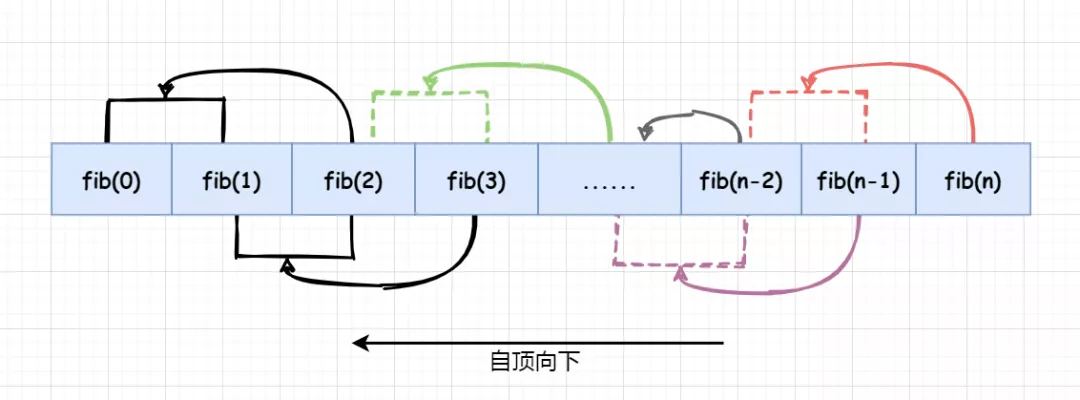
对任意一个斐波那契数,更一般的备忘录方法则为下图这样,与动态规划法正好相反:
实现上只需要对递归实现进行稍加改动即可:
1 #include<bits/stdc++.h> 2 using namespace std; 3 int n; 4 int f[100]; 5 int fib(int x){ 6 if(f[x]==-1)//如果f[x]==-1说明没有计算过,否则直接返回f[x] 7 { 8 if(x==1 || x==2) f[x]=1; 9 else f[x]=fib(x-1)+fib(x-2);//将计算结果存于f[x]中方便下次查询 10 } 11 return f[x]; 12 } 13 int main() 14 { 15 memset(f, -1, sizeof(f));//初始化为一个不可能的值 16 scanf("%d", &n); 17 printf("%d", fib(n)); 18 return 0; 19 }
动态规划方法(DP table)与备忘录方法都是存储子问题解的方法,除了解决问题的逻辑不同之外(一个自底向上,一个自顶向下),两者在时间效率上较为相近,关于两者的更多区别和相同点,以及如何选择文末解析。
上面讲的都是动态规划的一些基本概念,并不具有可操作性,下面带你真正扒一扒动态规划!
如何解决动态规划问题?
动态规划(Dynamic Programming,DP)是在多项式时间解决特定类型问题的一套方法论,且远远快于指数级别的蛮力法,而且动态规划的正确性是可以严格证明的。只不过这种证明对于解决动态规划问题并不具有决定性因素,所以此文也略去了。
解决动态规划问题四步法:
- 辨别是不是一个动态规划问题;
- 确定状态
- 建立状态之间的关系;
- 为状态添加备忘录或者DP Table 。
第一步:如何断定一个问题是动态规划问题?
一般情况下,需要求最优解的问题(最短路径问题,最长公共子序列,最大字段和等等,出现 最 字你就留意),在一定条件下对排列进行计数的计数问题(丑数问题)或某些概率问题都可以考虑用动态规划来解决。
所有的动态规划问题都满足重叠子问题性质,大多数经典的动态规划问题还满足最优子结构性质,当我们从一个给定的问题中发现了这些特性,就可以确定其可以用动态规划解决。
第二步:确定状态
DP 问题最重要的就是确定所有的状态和状态与状态之间的转移方程。确定状态转移方程是动态规划最难的部分,但也是最基础的,必须非常谨慎地选择状态,因为状态转移方程的确定取决于你对问题状态定义的选择。那么,状态到底是个什么鬼呢?
「状态」 可以视为一组可以唯一标识给定问题中某个子问题解的参数,这组参数应尽可能的小,以减少状态空间的大小。比如斐波那契数中,0 , 1, ..., n 就可以视为参数,而通过这些参数定义出的 DP[0],DP[1],DP[2],...,DP[n] 就是状态,而状态与状态之间的转移方程就是 DP(n) = DP(n-1) + DP(n-2) 。
再比如,经典的背包问题(Knapsack problem)中,状态通过 index 和 weight 两个参数来定义,即 DP[index][weight] 。DP[index][weight] 则表示当前从 0 到 index 的物品装入背包中可以获得的最大重量。因此,参数 index 和 weight 可以唯一确定背包问题的一个子问题的解。
所以,当确定给定的问题之后,首当其冲的就是确定问题的状态。动态规划算法就是将待求解问题分解成若干子问题,先求解子问题并保存子问题的答案避免重复计算,然后从这些子问题的解得到原问题的解。既然确定了一个一个的子问题的状态,接下来就是确定前一个状态到当前状态的转移关系式,也称状态转移方程。
第三步:构造状态转移方程
构造状态转移方程是 DP 问题最难的部分,需要足够敏锐的直觉和观察力,而这两者都是要通过大量的练习来获得。我们用一个简单的问题来理解这个步骤。
问题描述:给定 3 个数 {1,3,5},请问使用这三个数,有多少种方式可以构造出一个给定的数 'n'.(允许重复和不同顺序)。
设 n = 6,使用 {1,3,5} 则共有 8 种方式可以构造出 'n' :
1+1+1+1+1+1
1+1+1+3
1+1+3+1
1+3+1+1
3+1+1+1
3+3
1+5
5+1
我们现在考虑用动态规划的方法论来解决。首先确定该问题的状态,由于参数 n 可以唯一标识任意一个子问题,我们用参数 n 来确定状态。所以,上述问题的状态就可以表示为 DP[n],代表使用 {1,3,5} 作为元素可以形成 n 的总的序列数。
接下来就是计算 DP[n] 了,此时所谓的直觉就很关键了。
因为我们仅能使用 {1,3,5} 来形成给定的数字 n ,我们可以先考虑 n = 1,2,3,4,5,6 的结果,就是求出 n 等于 1,2,3,4,5,6 的状态值。
DP[n = 1] = 1,DP[n = 2] = 1, DP[n = 3] = 2,DP[n = 4] = 3,DP[n = 5] = 5,DP[n = 6] = 8。
现在,我们期望得到 DP[n = 7] 的值,我可以利用子状态的三种情况得到 n = 7 :
一、给状态 DP[n = 6] 的序列均加 1,如下所示:
(1+1+1+1+1+1) + 1
(1+1+1+3) + 1
(1+1+3+1) + 1
(1+3+1+1) + 1
(3+1+1+1) + 1
(3+3) + 1
(1+5) + 1
(5+1) + 1
二、给状态 DP[4] 的序列均加 3
(1+1+1+1) + 3
(1+3) + 3
(3 + 1) + 3
三、给状态 DP[2] 的序列均加 5
(1 + 1) + 5
仔细检查并确认上述三种情况覆盖了所有可能形成和为 7 的序列,我们就可以说
DP[7] = DP[6] + DP[4] + DP[2] 或者 DP[7] = DP[7 - 1] + DP[7 - 3] + DP[7-5]
推广一下:DP[n] = DP[n - 1] + DP[n - 3] + DP[n-5]
此时我们就可以写出这样的代码了:
int solve(int n)
{
if(n < 0){
return 0;
}
if(n == 1 || n == 0){
return 1;
}
return solve(n-1) + solve(n-3) + solve(n-5);
}
但是这个递归解法的时间复杂度是指数级别的,因为递归解法重复计算了子问题的解。所以,第四步考虑加入备忘录或者DP Table 。
第四步:为状态添加备忘录或者 DP Table
这个可以说是动态规划最简单的部分,我们仅需要存储子状态的解,以便下次使用子状态时直接查表从内存中获得。
添加备忘录的代码:
1 #include<bits/stdc++.h> 2 using namespace std; 3 //1 3 5 4 const int max_x=100; 5 int x; 6 int f[max_x]; 7 int dfs(int n){ 8 if(n<0) return 0; 9 if(n==0 || n==1)return 1; 10 if(f[n]==-1){ 11 f[n]=dfs(n-1)+dfs(n-3)+dfs(n-5); 12 } 13 return f[n]; 14 } 15 int main() 16 { 17 memset(f, -1, sizeof(f)); 18 scanf("%d", &x); 19 printf("%d", dfs(x)); 20 return 0; 21 }
添加 DP Table 的代码:
1 #include<bits/stdc++.h> 2 using namespace std; 3 //1 3 5 4 const int max_x=100; 5 int x; 6 int dp[max_x]; 7 int main() 8 { 9 scanf("%d", &x); 10 11 dp[1]=1; 12 dp[2]=1; 13 dp[3]=2; 14 dp[4]=3; 15 dp[5]=5; 16 17 for(int i=6; i<=x; i++) 18 dp[i]=dp[i-1]+dp[i-3]+dp[i-5]; 19 printf("%d", dp[x]); 20 return 0; 21 }
备忘录 vs DP Table
被复用的子问题的解既可以使用备忘录进行存储,也可以使用 DP Table,那么到底哪种方法更好,两种方法应该如何抉择呢?带着问号画句号。
虽然在最开始介绍备忘录方法时已有涉及,但这里的讲解会更通俗。我们一起来看两个同学学习动态规划的方式。
同学一:为了掌握动态规划的内容,我首先会学习一些动态规划的理论,然后再考虑去用大量的动态规划问题进行练习。
同学二:为了掌握动态规划的内容,我必须练习一些经典的动态规划问题,为此我不得不学习一些动态规划的理论。
两位同学说的是同一件事情,区别在于两者传递信息的方式不同,同学一可以视为一种自底向上的方式,而同学二是一种自顶向下的方式。
DP Table 就是同学一所说的自底向上的方式,备忘录则是同学二所说的自顶向下的方式。
DP Table 法(自底向上的动态规划)
顾名思义,自底向上就是从底部(递归的出口,动态规划中称为 base case)开始,不断向上回溯,计算出问题的解。下面看一下 DP Table 的状态转移过程。
设 DP 问题的基态(Base State)为 dp[0] ,目标状态为 dp[n] 。
如果我们从基态 dp[0] 开始转移,在遵循状态转移方程的情况下到达目标状态 dp[n] ,则将其称为 “自底向上” 的方法。(dp[0] → dp[n])
我们可以使用自底向上的方法计算一个数的阶乘。
定义状态:dp[x] 表示一个状态,即 x 的阶乘。
状态转移方程:dp[x] = dp[x - 1] * x .
int dp[] = new int[MAX];
int dp[0] = 1; // base state
for(int i = 1; i <= n; i++)
{
dp[i] = dp[i-1] * i;
}
上面的从基态 dp[0] 开始,经状态转移方程到达目标状态 dp[n] .
PS:注意这里的DP Table 是按照顺序填充的,并且我们直接从表中访问计算的子状态的解。
备忘录法(自顶向下的方法)
还是按照状态转移描述,我们从状态 dp[n] 开始,经状态转移向下寻找所需要的子状态的值,直到找到所有与状态 dp[n] 相关的子状态,并返回 dp[n] ,这就是自顶向下的备忘录方法。
我们用备忘录方法解决阶乘问题。
int dp[] = new int[MAX];
for(int i = 0; i < MAX; i++){
dp[i] = -1;
}
int solve(int x){
if(x == 0){
return 1;
}
if(dp[x] != -1){
return dp[x];
}
return (dp[x] = x * solve(x-1));
}
对于阶乘问题,内存布局是线性的,所以 dp[] 表是按照线性进行填充的。但是当考虑二维数组的情况下,就像最小成本路径问题一样,此时的内存将不是按照顺序存储。
状态:DP Table 状态转移关系较难确定,备忘录状态转移关系较易确定。你可以理解为自顶向下推导较为容易,自底向上推导较难。比如 DP[n] = DP[n - 1] + DP[n - 3] + DP[n-5] 的确定。
代码:当约束条件较多的情况下,DP Table 较为复杂;备忘录代码相对容易实现和简单,仅需对递归代码进行改造。
效率:动态规划(DP Table)较快,我们可以直接从表中获取子状态的解;备忘录由于大量的递归调用和返回状态操作,速度较慢。
子问题的解:当所有的子问题的解都至少要被解一遍,自底向上的动态规划算法通常比自顶向下的备忘录方法快常数量级;当求解的问题的子问题空间中的部分子问题不需要计算,仅需求解部分子问题就可以解决原问题,此时备忘录方法要优于动态规划,因为备忘录自顶向下仅存储与原问题求解相关的子问题的解。
表空间:DP Table 依次填充所有子状态的解;而备忘录不必填充所有子问题的解,而是按需填充。
至于两个该如何选择,我想你的心中也有数了,建议按照解动态规划的四步骤依次求解,至于第四步,你个人喜欢用 DP Table 就用 DP Table ,喜欢备忘录就用备忘录。
总结
可操作性的动态规划解题步骤:
第一步:断定一个问题是不是动态规划问题?(重叠子问题、最优子结构,“最” 字要注意)。
第二步:确定状态及其含义;
第三步:构造状态转移方程(根据题目给定的条件,枚举若干子状态,然后尝试用这些子状态构造出未知状态的解,就可以轻松得到状态转移方程,当然这一步离不开大量的练习)。
第四步:为状态添加备忘录或者 DP Table(根据个人喜欢,两者没有绝对的好坏之分)。