最近在自己跑模型。总结了下一些比较杂的一些小计算问题。
评价指标
目标检测:
准确率与召回率。实际就是机器学习中查准率和查全率。 根据IOU计算准确率。不同IOU下计算求平均,即为平均准确率 mAP. 可通过FP曲线来看
速度:每秒识别出图像的帧数。FPS
评价数据集:COCO Cityscapes Pascal VOC等数据集
https://zhuanlan.zhihu.com/p/34179420
人脸检测:
人脸检测和目标检测评价指标差不多。再加一个误检率。
语义分割:
https://zhuanlan.zhihu.com/p/37618829
像素精度:每一类像素正确分类的个数/每一类像素的个数
均像素精度:所有类像素精度平均值
平均交并比:每一类IOU取平均值。其实和目标检测差不多,不过换成像素级别了
权频交并比: 平均交并比的带权重形式
看过少数几篇论文,感觉衡量指标主要还是平均交并比IOU,损失函数也主要按这个计算的
卷积及池化过程中坐标变换(感受野计算)
https://zhuanlan.zhihu.com/p/44106492
https://zhuanlan.zhihu.com/p/26663577
https://zhuanlan.zhihu.com/p/40267131
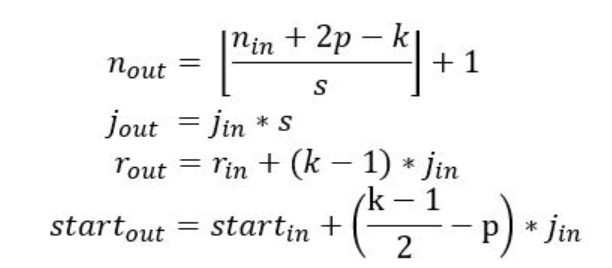
这四个公式很重要,基本涵盖了有关
1. 为卷积后特征图大小。nin为输入特征图大小,P为 padding数,K为卷积核大小,s为步长。例 17*17特征图经 3*3卷积,paading 1,步长2.则卷积后输出特征图大小为 9*9
2. 步长积
3. 此公式用来计算感受野大小。rin为输入上一层感受野,例如,第一层,经过k=3*3,s=2的两次卷积后,感受野大小 1+(3-1)*1=3 3+(3-1)*2=7.此处要注意Jin和Jout区别。 注意此时有空洞卷积的哈,后面还需*dialation
4. 此公式用来计算特征感受野中心坐标。
给一张其他人博客的例子:

此处还要引入一个坐标对齐的概念。 例如R-CNN中直接S/2取整,而空洞卷积坐标映射是采用双线性差值方式。简单介绍下空洞卷积概念
空洞卷积
https://zhuanlan.zhihu.com/p/50369448
https://zhuanlan.zhihu.com/p/50937830
优点:
1.下采样在扩大感受野的同时会降低图片分辨率。空洞卷积引入,可扩大感受野,同时很少损失分辨率。
2. 可引入更多的上下文信息,有利于增加识别率
缺点:
空洞卷积可能导致部分局部信息丢失。未解决此种方案引入了不同空洞率的卷积核,之后进行融合。参考Deeplab系列。
空洞卷积感受野计算方式和普通卷积一样,就是把空洞+卷积核看成一个大卷积
卷积网络复杂度计算
https://zhuanlan.zhihu.com/p/31575074
时间复杂度Time~O(M2*K2*Cl-1Cl) M为输出特征图大小,K为卷积核大小,C为通道数
Inception网络使用多个小卷积代替大卷积,感受野相同,且细节提取的更好。同时又大大减小了参数量。
例: 两个3*3 代替 一个5*5 参数量变化:before M25*5*K1*K2 after M23*3*K1*K2*2 即变为原来的18/25 多次之后参数减小量很可观
另外此处可分析下1*1 卷积。3*3 卷积前面增加 1*1卷积,之后计算量也可减小。。 引入小卷积作用可从降低复杂度方向来分析。
https://zhuanlan.zhihu.com/p/34204282
此链接为复杂度计算的深入分析,这里不再引入了。。这个复杂度计算还是很有用的。 之前我是做硬件的,复杂度计算是AI芯片面试很大可能性会问到的一个角度。。