机器人学中最常见的要求之一,是把机器人末端执行器平滑地从位姿 移动至位姿 。基于之前讨论过的轨迹的内容,我们将讨论两种方法来产生轨迹:在关节空间中的直线和在笛卡儿空间中的直线。这两种直线分别被称为关节空间运动和笛卡儿空间运动。
关节空间运动
我们考虑末端执行器在两个笛卡儿位姿之间移动:
>> T1 = transl(0.4, 0.2, 0) * trotx(pi);
>> T2 = transl(0.4, -0.2, 0) * trotx(pi/2);
它们位于 平面内,且末端执行器指向朝下。与这两个位姿对应的初始和最终关节坐标向量为
>> q1 = p560.ikine6s(T1);
>> q2 = p560.ikine6s(T2);
而我们要求整个运动发生在 秒时间内,采样时间间隔为 微秒。
>> t = [0:0.05:2]';
通过在q1和q2两个位形之间的平滑插值就能得到一个关节空间轨迹。我们可以用之前的标量插补函数tpoly或lspb,再配合多轴驱动函数mtraj一起实现:
>> q = mtraj(@tpoly, q1, q2, t);
或
>> q = mtraj(@lspb, q1, q2, t);
其结果是得到一个 阶的矩阵q,其中每行对应一个采样 time step,每列对应一个关节值。但在这里及以后,我们将使用jtraj这个更方便的函数:
>> q = jtraj(q1, q2, t);
其作用相当于具有tpoly插值的mtraj,但它对多轴情况进行了优化,而且还允许使用额外的参数来设置初始和最终速度。对于mtraj+tpoly,最后一个参数可以是一个时间向量,如示例,或者是一个指定采样时间步数的整数。
我们可以通过可选的输出参数,获得随时间变化的关节速度和加速度向量:
>> [q,qd,qdd] = jtraj(q1, q2, t);
SerialLink类中的jtraj方法为上述步骤提供了一个更简洁的表达方式:
>> q = p560.jtraj(T1, T2, t);
所得轨迹可以绘制出动画进行观察:
>> p560.plot(q)
我们也可以绘制出关节角的图形,例如所有随时间变化的关节角:
>> plot(t, q)

关节坐标轨迹虽然是平滑的,但我们并不知道机器人末端执行器在笛卡儿空间中将如何移动。然而通过将正运动学作用于关节坐标轨迹,可以很容易地确定其效果
>> T = p560.fkine(q);
其结果得到一个三维的笛卡儿轨迹。该轨迹的位移部分为
>> p = transl(T);
>> about(p)
p [double] : 41x3 (984 bytes)
其中,每一行代表一个采样时间上的末端执行器位置向量。绘制出的各坐标分量随时间变化的图形如图所示。

我们也可以绘制出末端执行器在 平面内的轨迹:
>> plot(p(:,1), p(:,2))

显然,这条轨迹不是一条直线。这是预料之中的,因为我们仅仅指定了两个端点的笛卡儿坐标。当机器人在运动过程中旋转其腰部关节时,末端执行器的运动轨迹会自然地划出一个圆弧。在实际工作中,这可能会导致机器人和附近物体之间发生碰撞,即使它们不在位姿A和B之间的路径上。
我们还可以绘制出末端执行器的姿态随时间变化的图形(横滚-俯仰-偏航角形式):
>> plot(t, tr2rpy(T))

注意初始横滚角显示为 ,但在下一个采样时间步它变为 。这是一个有限精度算法的产物,且这两个角度在圆周上是等价的。
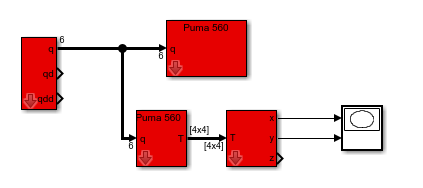
我们也可以在 Simulink 中实现上述示例:
>> mdl_puma560
>> sl_jspace
其框图模型如图所示。jtraj模块的参数是关节坐标的初始值和最终值,以及运动的持续时间(Simulink 的积分时间需要设置为等于运动段时间,设置可以通过Simulation菜单或通过 MATLAB 命令>> sim('sl_jspace','10);)。平滑变化的关节角被分成两路传送,一路到plot模块中,该模块能在一个单独的窗口中显示机器人运动的动画;另一路到fkine模块用于计算机器人的正运动学。plot和fkine两个模块有一个共同的SerialLink对象参数,本示例中该参数为p560。使用T2xyz模块能够将末端执行器位置中的笛卡儿位置提取出来,它类似于工具箱函数transl。XY Graph模块可以绘制随x变化的y。


笛卡尔运动
前面是在位形空间中做直线运动而笛卡尔空间不为直线,现在我们讨论在笛卡尔空间中的直线运动。可以通过使用工具箱函数ctraj来实现,这个函数之前已经介绍过。它的用法与jtraj很相似:
>> Ts = ctraj(T1, T2, length(t));
其输入参数是初始和最后的位姿,以及时间步数,它返回的是一个三维矩阵形式的轨迹。
对于前面的关节空间运动的例子,我们将提取并绘制其位置分量:
>> plot(t, transl(Ts))

以及姿态分量:
>> plot(t, tr2rpy(Ts))

各分量的运动以及 平面内末端执行器的路径如下图所示。相比关节空间运动的图,我们注意到一些重要的差异。第一,笛卡尔运动中的位置和姿态随时间线性变化。姿态的俯仰角是为零的常数且不随路径变化。其次,末端执行器在 平面内沿着一条直线运动。

>> qc = p560.ikine6s(Ts);
>> qplot(t, qc);

通过奇异点的运动
我们特意选择一个通过机器人奇异点的运动轨迹。我们将先前示例中的笛卡儿端点变为
>> T1 = transl(0.5, 0.3, 0.44) * troty(pi/2);
>> T2 = transl(0.5, -0.3, 0.44) * troty(pi/2);
其结果是得到一个沿着 方向的运动,且末端执行器的 轴指向 方向。其笛卡儿路径是
>> Ts = ctraj(T1, T2, length(t));
我们将其转换到关节坐标:
>> qc = p560.ikine6s(Ts);

各关节轨迹如图所示。在 时,我们观察到手腕关节角度 和 的变化率非常高。其原因是 几乎已经为零,这意味着 和 的旋转轴几乎对齐重合了,也就是万向节死锁情况或奇异点。
关节轴重合意味着该机器人已经失去了一个自由度,实际上现在是一个五轴机器人。从运动学上我们只能求解出 的和值,而针对同一个和值可以有无数的 和 解。但如果是采用两个位姿之间的关节空间运动,则可以避免上述问题,因为它不需要求解逆运动学。然而,关节空间运动不会在整个路径中始终维持工具在 方向上的姿态,除了在两个端点。广义逆运动学的方法ikine能很容易地处理奇异性问题。