给出空间中一个点,将该点绕向量(k1 k2 k3)旋转一定角度theta,从而得到新点,这种操作能够利用罗德里格斯变换来处理。
变换公式如下:

其中theta为旋转度数。
K为由点所绕的单位向量构成的矩阵。
比如所绕向量为(k1 k2 k3),则矩阵K表示如下:
公式中R即为进行这种变换的旋转矩阵。
同样,用四元数也能够完成这种旋转操作。
下面给出了用四元数和罗德里格斯变换对同一个点做旋转的例子,互相验证一下。
matlab代码如下:
clear all; close all; clc; p=rand(1,3); %待旋转点 quat = eul2quat([0.6,0.4,0.5]); %利用欧拉角构造四元数 q_quat = quaternion(quat); p_quat = quaternion([0 p]); re_quat= q_quat*p_quat*q_quat'; %利用四元数旋转 [w,a,b,c] = parts(re_quat); %得到四元数中四个数 theta = acos(quat(1))*2; %得到旋转弧度和所环绕的向量 kx = quat(2)/sin(theta/2); ky = quat(3)/sin(theta/2); kz = quat(4)/sin(theta/2); K=[0 -kz ky; kz 0 -kx; -ky kx 0]; R = eye(3) + sin(theta)*K + (1- cos(theta))*K*K; %罗德里格斯公式 p1= R*p'; %利用罗德里格斯公式计算的旋转后的点 dr = HelperDrawRotation; figure; dr.draw3DOrientation(gca,[quat(2:4)],theta*180/pi); hold on; plot3(p(1),p(2),p(3),'bo') plot3(p1(1),p1(2),p1(3),'r*') plot3(a,b,c,'go'); axis equal;
其中的HelperDrawRotation是matlab帮助中的例子,我就不贴了,可以点击这里下载。
变换效果如下:
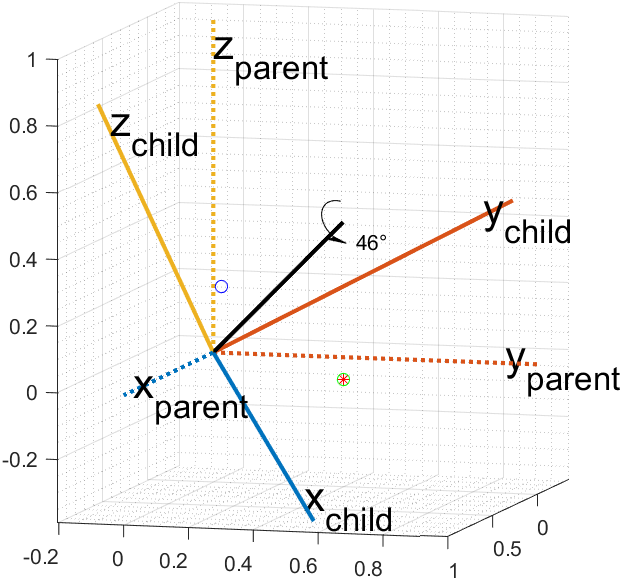
利用四元数和罗德里格斯变换将蓝圈变换到绿圈(红星)上,结果是一致的。
注:这里matlab版本为2019a,2018a之前版本可能没有quaternion这个函数。