STM32 TIM高级定时器的互补PWM支持插入死区时间,本文将介绍如何计算以及配置正确的死区时间。
什么是死区时间?
死区时间主要是在逆变电路中,防止一个桥臂的上下两个开关器件同时导通,那么会导致电路电流上升,从而对系统造成损害。因为开关元器件的和严格意义并不是相同的。所以在驱动开关元器件门极的时候需要增加一段延时,确保另一个开关管完全关断之后再去打开这个开关元器件,这里的延时就是需要施加的死区时间。

数据手册的参数
这里看了一下NXP的IRF540的数据手册,门极开关时间如下所示;
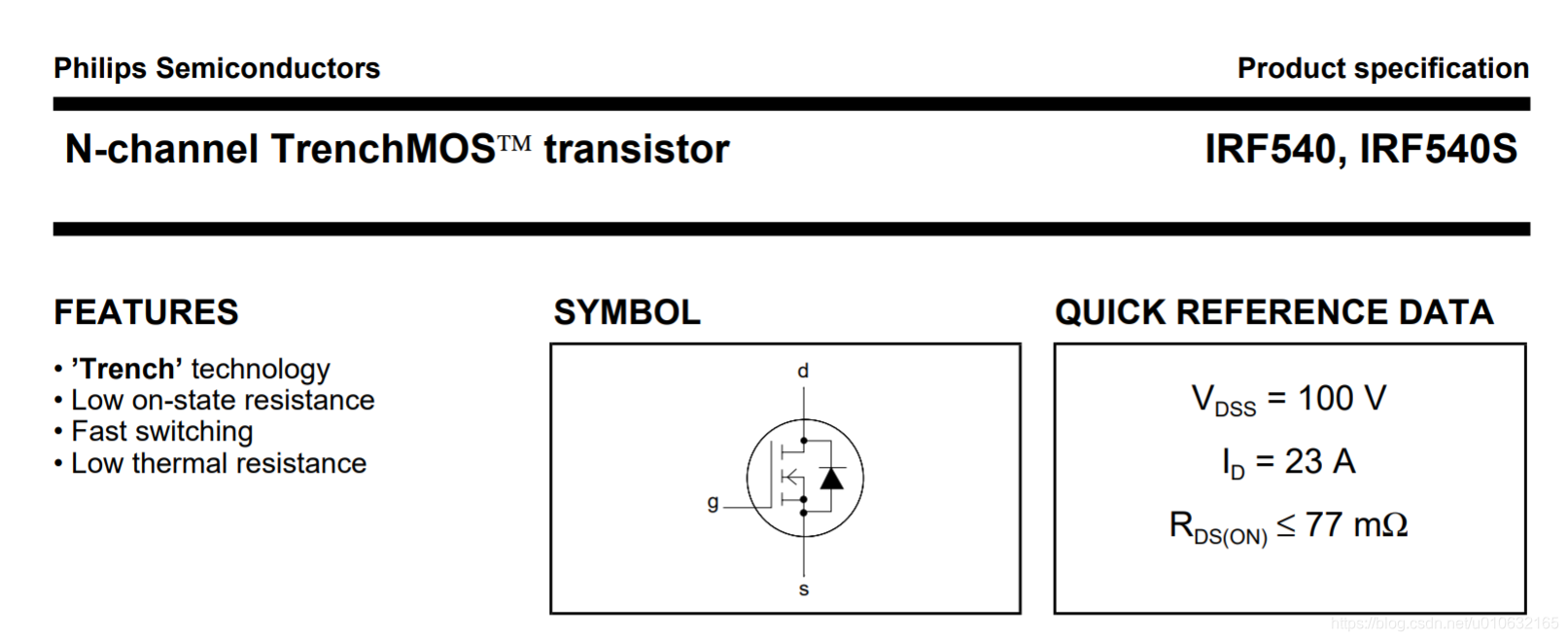
然后找到相关的,,,的相关典型参数;

- :门极的开通延迟时间
- :门极的关断延迟时间
- :门极上升时间
- :门极下降时间
下面是一个IGBT的数据手册;
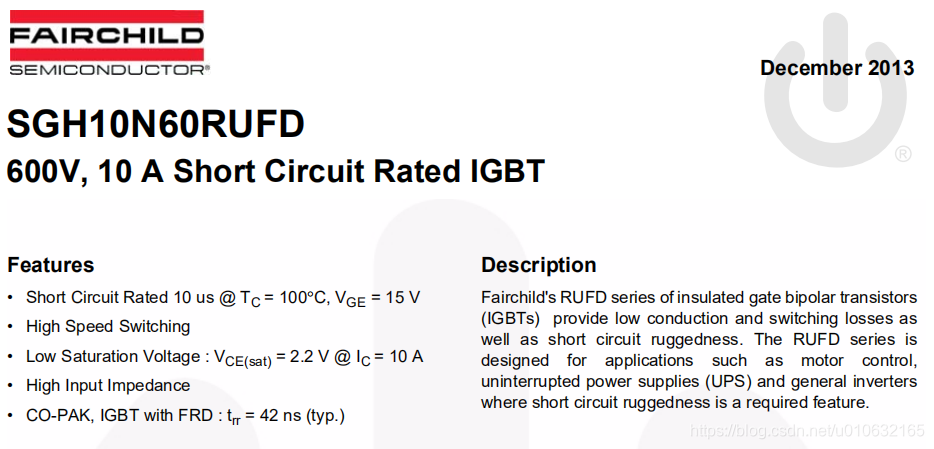
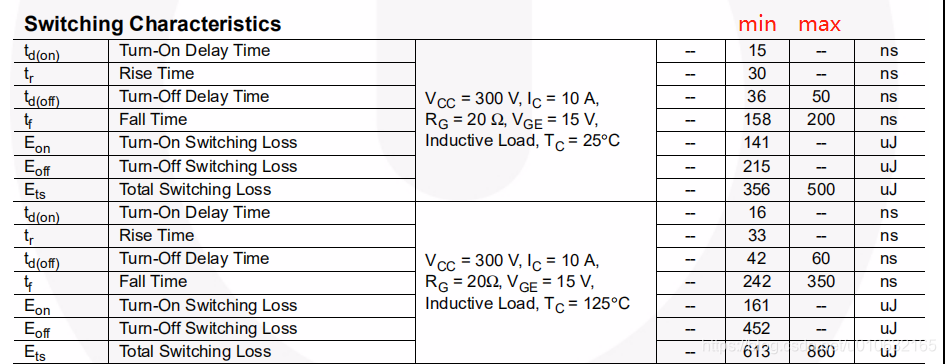
下图是IGBT的开关属性,同样可以找到,,,等参数,下面计算的时候会用到;
如何计算合理的死区时间?
这里用表示死区时间,因为门极上升和下降时间通常比延迟时间小很多,所以这里可以不用考虑它们。则死区时间满足;
- :最大的关断延迟时间;
- :最小的开通延迟时间;
- :最大的驱动信号传递延迟时间;
- :最小的驱动信号传递延迟时间;
其中 和正如上文所提到的可以元器件的数据手册中找到;
和 一般由驱动器厂家给出,如果是MCU的IO驱动的话,需要考虑IO的上升时间和下降时间,另外一般会加光耦进行隔离,这里还需要考虑到光耦的开关延时。
STM32中配置死区时间
STM32的TIM高级定时器支持互补PWM波形发生,具体可以参考之前的文章《STM32 TIM 多通道互补PWM波形输出配置快速入门》和《STM32 TIM1高级定时器配置快速入门》,同时它支持插入死区时间和刹车的配置。
直接看参考手册里的寄存器TIMx_BDTR,这是配置刹车和死区时间的寄存器;

可以看到死区时间DT由UTG[7:0]决定,这里还有一个问题是是什么?
在TIMx_CR1的寄存器可以得知,由TIMx_CR1寄存器的CKD决定;如果这里配置成00,那么和内部定时器的频率相同,为8M;

结合代码做一下计算;系统频率为72M,下面是时基单元的配置;
#define PWM_FREQ ((u16) 16000) // in Hz (N.b.: pattern type is center aligned)
#define PWM_PRSC ((u8)0)
#define PWM_PERIOD ((u16) (CKTIM / (u32)(2 * PWM_FREQ *(PWM_PRSC+1))))
TIM_TimeBaseStructInit(&TIM1_TimeBaseStructure);
/* Time Base configuration */
TIM1_TimeBaseStructure.TIM_Prescaler = 0x0;
TIM1_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned1;
TIM1_TimeBaseStructure.TIM_Period = PWM_PERIOD;
TIM1_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV2;
PWM的频率是16K,注意这里的PWM是中央对齐模式,因此配置的时钟频率为32K;
下面时刹车和死区时间,BDTR寄存器的配置,因此这里的CK_INT为32M
#define CKTIM ((u32)72000000uL) /* Silicon running at 72MHz Resolution: 1Hz */
#define DEADTIME_NS ((u16) 500) //in nsec; range is [0...3500]
#define DEADTIME (u16)((unsigned long long)CKTIM/2
*(unsigned long long)DEADTIME_NS/1000 000 000uL)
TIM1_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;
TIM1_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;
TIM1_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1;
TIM1_BDTRInitStructure.TIM_DeadTime = DEADTIME;
TIM1_BDTRInitStructure.TIM_Break = TIM_Break_Disable;
TIM1_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;
TIM1_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Disable;
例:若TDTS = 31ns(32MHZ),可能的死区时间为:
0到3970ns,若步长时间为31ns;
4000us到8us,若步长时间为62ns;
8us到16us,若步长时间为250ns;
16us到32us,若步长时间为500ns;
如果需要配置死区时间 500ns,系统频率72,000,000Hz,那么需要配置寄存器的值为;
直接写成宏定义的形式
#define DEADTIME (u16)((unsigned long long)CKTIM/2
*(unsigned long long)DEADTIME_NS/1000 000 000uL)
用示波器验证了一下,结果正确;当时图片忘记保存,下次更新的时候再上图吧。