在开始编写ROS程序时, 首先需要构建一个工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws
catkin_make
source devel/setup.bash
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
echo "source /home/usrname/catkin_ws/devel/setup.bash" >> ~/.bashrc
这样工作空间就构建完成. 其中大部分都linux相关的操作, 其中主要起构建工作空间作用的有两句: catkin_init_workspace 作用是初始化工作空间; catkin_make 进行编译, 编译工作一定在工作空间的根目录,此处即为catkin_ws.
工作空间构建完成后,还需要在空作空间内构建包即package, 然后在package内编写所需功能模块的代码.比如
cd ~/catkin_ws/src
catkin_create_pkg practice1 std_msgs roscpp rospy
构建功能包需在src目录下进行, 其一般格式: catkin_create_pkg [package_name][dependency1] [dependency2] ... [dependencyN]. package 后面是接下来构建包可能用到的依赖包, 这里需要注意的是依赖包后面仍有办法继续添加,因此写不全也没有问题,只不过后面操作稍稍麻烦一点. 构建包仍需编译, 如上所述, 先回到工作空间根目录:
cd ~/catkin_ws/
catkin_make
catkin_make是对工作空间中的所有package进行编译,也可以指定某一个包进行单独编译: catkin_make --pkg [package_name]
创建ROS nodes
现在开始,编写ROS程序,在这里我们主要以python为主, python编写的代码需要放在script目录下,这个目录目前没有,你需要自己创建.
cd ~/catkin_ws/src/practice1
mkdir script
作为第一个程序, 还是以'hello world' 开始, (ROS可支持多种语言,其中主要的是C++与python, 接下来程序如无特别要求, 都是用python来编写的.) 这里需要两个程序(publisher.py, subscriber.py),一个作为发布者发布信息, 另一个则为作为订阅者订阅信息.
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
from std_msgs.msg import String
import time
def msg_publisher():
ros.init_node('msg_publisher', anonymous=False)
pub = ros.Publisher('helloworld', String,queue_size=1)
rate = ros.Rate(10)
while not ros.is_shutdown():
strings = 'hello world, now is %s' % str(time.time())
msg = String()
msg.data = strings
pub.publish(msg)
rate.sleep()
if __name__ == '__main__':
msg_publisher()
开头引入所需的功能包, rospy 是使用python 来编写ROS程序必不可少的包, std_msgs 是标准信息包,在无特别需求的情况下, 此包基本满足程序所需的信息格式要求.
ros.init_node 是初始化此发布节点, msg_publisher 是此节点的名字, anonymous 设置为True, 意味着本节点可以同时启动多个示例, 反之只能启动一个,否则会因冲突而报错.
ros.Publisher() 是在声明此发布节点发布的topic, topic的名字是helloworld, 此topic数据传输所使用的格式为String类型, queue_size 是缓存的队列长度, 设置一个很小的值即可,比如此处设为1.
ros.Rate(10) 是信息发布的频率, 此处是每秒 10 次.
接下来即是此节点开始发布信息,这是设置在一个循环循环里面的, ros.is_shutdown 表示只要不关闭节点就会一直发布. 因为helloworld 所需的数据格式为String类型,因此需要先将节点发布的信息定义为String格式,即代码中的msg = String(). String类型只有一个data属性,将所需发布的信息赋值于它即可. rate.sleep() 是在控制发布频率.
PS: 最好每一次编写python程序都将如下字段加上,否则可能会报错:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
下面是订阅程序:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
from std_msgs.msg import String
import time
def call_back(msg):
print(msg.data)
return msg.data
def msg_subscriber():
ros.init_node('msg_subscriber',anonymous=False)
sub = ros.Subscriber('helloworld',String,callback=call_back)
ros.spin()
if __name__ == '__main__':
msg_subscriber()
call_back(msg) 是订阅者处理接收发布者发布信息所需的功能模块. 订阅者订阅的是某个topic, 因此需要知道topic的名称, 然后才可订阅,接收到消息. 此处订阅者订阅的是helloworld topic. ros.spin() 是回调监听函数, 一般写在程序最后,因为,程序执行到这句就会一直在此处循环监听topic,后来的语句执行不到.而且,callback函数也是此处受其调用的,即在此处开始执行,这样,订阅者就可一直接收消息,反映在此例,即你会接收很多句类似'hello world, now is ...'的信息.
因为是python程序写完即可执行, 但为了ROS可以找到写的两个文件, 需要设置其为可执行属性:
cd ~/catkin_ws/practice1/script
chmod +x publisher.py
chmod +x subscriber.py
此处的命令需要在script目录下执行.
接下来开始执行代码:
roscore
rosrun practice1 publisher.py
rosrun practice1 subscriber.py
以上三句分别在三个不同的terminal窗口执行. 切记在执行任何ROS之前都需执行roscore. 执行后,会在subscriber 窗口看到类似的如下信息:

再开启一个窗口使用如下命令查看当前topics:
rostopic list
会显示如下信息:

其中的/helloword即是此处publisher发布的topic,另外两个是log相关的topic.
定制信息类型
在ROS中传输信息, 不同任务一般会有不同的信息格式, 简单的格式可能潢足不了需求, 因此就需要根据任务来定制自己的信息类型.在ROS中, 信息类型的定义是放在msg目录内(需要在包目录下创建即本例中的practice1下面), 并且文件以.msg为后缀. 比如定义一个简单的位置信息. 比如名为 position_msg.msg.
float32 X
float32 Y
float32 Z
这样就定义完成, 位置信息由三个维度定义, 变量类型float32类型.
定制化信息可以被ROS识别依赖信息生成模块, 需要在package.xml中加入如下两句(其实文件内有此两句,只是被注释掉了,找到并解注释即可):
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
还需要在CMakeList.txt中的find_package()中加入message_generation:
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
message_generation
)
以及:
## Generate messages in the 'msg' folder
add_message_files(
FILES
position_msg.msg
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
最后, 开始编译:
cd ~/catkin_ws/
catkin_make --pkg practice1
编译完成后, 可以用rosmsg来查看:
rosmsg show practice1/position_msg
可看到如下信息:

接下来,就可以使用刚刚定义的信息类型了. 如之前,编写publisher与subscriber,可分别命名为msg_pub.py'与msg_sub.py:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
from practice1.msg import position_msg
def msg_publisher():
ros.init_node('msg_publisher', anonymous=True)
pub = ros.Publisher('position', position_msg,queue_size=1)
rate = ros.Rate(10)
while not ros.is_shutdown():
msg = position_msg()
msg.X = 23.
msg.Y = 12.
msg.Z = 0.2
pub.publish(msg)
rate.sleep()
if __name__ == '__main__':
msg_publisher()
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
from practice1.msg import position_msg
def call_back(msg):
print('position is X: %s, Y: %s, Z: %s' % (msg.X, msg.Y, msg.Z))
return msg.data
def msg_subscriber():
ros.init_node('msg_subscriber', anonymous=False)
sub = ros.Subscriber('position', position_msg, callback=call_back)
ros.spin()
if __name__ == '__main__':
msg_subscriber()
编写后(以后每写一个python执行程序都需要如此):
cd ~/catkin_ws/practice1/msg
chmod +x msg_pub.py
chmod +x msg_sub.py
开始运行, roscore一定是要首先打开的, 如果之前打开了,就不用再次开启了:
rosrun practice1 msg_pub.py
rosrun practice1 msg_sub.py
可看到如下信息:

Z的变化是精度问题,目前先不用纠结.
Service
前面介绍过,服务是客户端发送请求, 服务端经过处理反回结果的一种更高级的topic类型. 如上面的信息格式, 要使用服务, 需要先定义服务的数据类型. 比如简单的测距服务, 首先在包目录下创建srv目录,然后在里面加入distance_srv.srv文件,文件内容如下:
float32 X
float32 Y
float32 Z
---
float32 DIST
文件中 --- 是分隔符, 其上定义请求所需的数据格式,其下为结果数据格式.
然后, 如上面的定制化message过程, 需要在package.xml中加入(如果上面做过如下操作,不需要重复操作):
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
类似地:
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
message_generation
)
## Generate services in the 'srv' folder
add_service_files(
FILES
distance_srv.srv
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
最后编译(记住,是在包的目录下):
cd ~/catkin_ws/
catkin_make
r查看:
rossrv show practice1/distance_srv
可看到如下信息:

编写服务的程序, 服务的程序两端分别是服务端,客户端, 客户端发送请求, 服务端根据客户端的信息进行处理,产生结果. 先编写服务端代码(distance_server.py):
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import math
import rospy as ros
from practice1.srv import distance_srv, distance_srvResponse
CURRENT_POSITION = [0.0, 0.0, 0.0]
def call_back(request):
distance = math.sqrt((request.X - CURRENT_POSITION[0]) ** 2 + (request.Y - CURRENT_POSITION[1]) ** 2 + (
request.Z - CURRENT_POSITION[2]) ** 2)
return distance_srvResponse(distance)
def server():
ros.init_node('distance_server', anonymous=True)
srv = ros.Service('distance', distance_srv, handler=call_back)
ros.spin()
if __name__ == '__main__':
server()
然后是客户端代码(distance_client.py):
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
from practice1.srv import distance_srv, distance_srvRequest
def distance_client(X, Y, Z):
ros.init_node('distance_client', anonymous=True)
ros.wait_for_service('distance')
service_proxy = ros.ServiceProxy('distance', distance_srv)
distance = service_proxy(X, Y, Z)
ros.loginfo('the distance between target and myself is %s.', distance.DIST)
return distance.DIST
if __name__ == '__main__':
X = 1.0
Y = 2.0
Z = 3.0
distance_client(X, Y, Z)
执行后会有类似如下结果:

ROS launch
上面的几个例子,每个只涉及一个topic, 两人个节点,但在实际项目中,会有多个topics, 多个节点, 依次启动非常麻烦. 为此, ROS提供一种.launch文件, 此文件类型启动配置文件, 即当配置好.launch文件并运行,可同时启动多个节点.
若要使用这种方便的启动方式,首先需要在包目录下面创建launch文件夹,并在其中创建.launch文件.
比如上面service的例子, 可以创建distance.launch文件:
<launch>
<node name ="distance_server" pkg="practice1" type="distance_server.py" output="screen"/>
<node name ="distance_client" pkg="practice1" type="distance_client.py" output="screen"/>
</launch>
.launch 其实xml格式的文件, 其中的内容需要放在<launch> </launch>里面. 其中<node name>是节点的名字, pkg 的值是包的名字, 而type的值文件的名字, 而output="screen" 则表明将打印信息输出到当前console中. 这只是.launch文件支持的几个常用的参数, 还有很多,如'para', 'arg','respawn' 等等, 后面接触再介绍用法.
启动.launch文件需要roslaunch 命令, 其格式:
roslaunch pkgname launch_file
此处例子的启动方式即为:
roslaunch practice1 distance.launch
可看到如下类似结果:

最后一行是生的log文件,可先不用管它.
Parameter server and dynamic parameters
参数服务器是ROS Master 的一部分, 其保存的配置信息,可以让所有节点访问. 配置信息在ROS系统运行时也可能需要改变. 改变参数服务器的配置信息需要dynamic_reconfigure包.
配置信息需要放在cfg目录(在包目录下创建)下,在cfg里面创建一个比如叫firsttry.cfg的文件:
#!/usr/bin/env python
PACKAGE = "sample" # your package name
from dynamic_reconfigure.parameter_generator_catkin import *
gen = ParameterGenerator()
gen.add("int_param", int_t, 0, "An Integer parameter", 50, 0, 100)
gen.add("double_param", double_t, 0, "A double parameter", .5, 0, 1)
gen.add("str_param", str_t, 0, "A string parameter", "Hello World")
gen.add("bool_param", bool_t, 0, "A Boolean parameter", True)
size_enum = gen.enum([ gen.const("Small", int_t, 0, "A small constant"),
gen.const("Medium", int_t, 1, "A medium constant"),
gen.const("Large", int_t, 2, "A large constant"),
gen.const("ExtraLarge", int_t, 3, "An extra large constant")],
"An enum to set size")
gen.add("size", int_t, 0, "A size parameter which is edited via an enum", 1, 0, 3, edit_method=size_enum)
exit(gen.generate(PACKAGE, "para", "firsttry"))
可以看到,虽然文件以cfg为后缀,但其实是一个python文件.
首先引入dynamic_reconfigure包内参数生成的所需模块. 然后初始化一个参数生成器,接下来就需要定义参数. 生成器的.add函数可以完成此功能, 其一般格式:
gen.add(name,paramtype, level, description, default=None,min=None,max=None,edit_method='')
name: 参数名字;paramtype:参数类型;level: 传入到回调函数内的位掩码;description: 参数的描述信息;default: 参数默认值;min: 参数能达到的最小值;max:参数能达到的最大值;edit_method: 参数需要额外处理的编辑方法, 比如上面遍历类型数据的映射.
最后一句
exit(gen.generate(PACKAGE, "pracetice1", "firsttry"))
表示生成参数后即退出生成程序. 其中最后一个参数的值一定是此文件名去掉后缀的结果,在此例中,即firstry.cfg, 否则会有奇怪的错误.
因为是python文件, 因此需要赋权:
chmod a+x firsttry.cfg
然后还需要在CMakerLists.txt中加入如下内容:
find_package(catkin REQUIRED COMPONENTS
dynamic_reconfigure
)
generate_dynamic_reconfigure_options(
cfg/firsttry.cfg
)
然后编译.
配置参数设定好后,需要创建配置服务器节点(比如命名为cfg_server.py), 使得其它节点可以使用,更改配置参数.
#!/usr/bin/env python
import rospy as ros
from dynamic_reconfigure.server import Server
from practice1.cfg import firsttryConfig
def callback(config, level):
ros.loginfo("""Reconfigure Request: {int_param}, {double_param},
{str_param}, {bool_param}, {size}""".format(**config))
return config
if __name__ == "__main__":
ros.init_node("practice_cfg", anonymous=False)
srv = Server(firsttryConfig, callback)
ros.spin()
此程序非常简单, 配置参数的引入此处:from practice1.cfg import firstryConfig, 其一般格式如下:
from [package].cfg import [config_filename]Config.
回调函数callback() 需有level作为入参, 因为本例非常简单,而没有使用此参数, 另外, 需要返回config.
赋权后启动,即其节点即可访问, 我们甚至可以用rqt来显示图形化界面,进行手动调节:
rosrun practice1 cfg_server.py
rosrun rqt_reconfigure rqt_reconfigure
可以看到类似如下界面:

在ROS系统进行时,希望其可以自动获取,更改配置参数. dynamic_reconfigure包的client接口提供了这样的功能.
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
import dynamic_reconfigure.client
def callback(config):
ros.loginfo("Config set to {int_param}, {double_param}, {str_param}, {bool_param}, {size}".format(**config))
if __name__ == "__main__":
ros.init_node("cfg_client")
# name='practice_cfg',name of the server to connect to (usually the node name)
client = dynamic_reconfigure.client.Client(name = "practice_cfg", timeout=30, config_callback=callback)
r = ros.Rate(0.5)
x = 0
b = False
while not ros.is_shutdown():
x = x + 1
if x > 10:
x = 0
b = not b
client.update_configuration(
{"int_param": x, "double_param": (1 / (x + 1)), "str_param": str(ros.get_rostime()), "bool_param": b,
"size": 1})
r.sleep()
对于上面的server程序,可以看到其回调函数不需要level作为入参, 也没有要求一定要返回config. 然后我们简单地每0.5秒更新配置参数.运行后,可看到类似如下结果:

也可以获取配置参数, 可用类似如下命令:
cfg = client.update_configuration()
x = cfg.int_param
y = cfg.bool_param
...
Action
相对message, service 在请求后可以得到结果, 即节点间或者说server与client间存在一定的交互, 当更复杂一点的场景, 比如结果不能马上返回,要一等相对较长的时间; 服务当前不可用, 客户端在中途希望取消或重新请求服务等等 service就不一定合适了.再举个更具体的例子,比如机器人导航到某一特定地点, 这个距离可能比较远, 而且希望在行进过程中,都能够知道机器人的位置,或者希望在经过特殊环境比如河流,取消去向目标地点的导航任务.这样的场景, 单单在最终给出结果显然不能令人满意. ROS的actionlib包可以创建action这样的服务类型, 此类服务在执行过程中可以服务端可以输出反馈信息,也而客户端也可在达到既定目标之前可以取消或者重新设定目标.
比如一个简单的计算Fibonacci数列,输入数长度,返回数结果. 首先,在包目录下创建action目录,并在其中创建.action数据类型, 比如叫就叫fibonacci.action:
int32 order
---
int32[] sequence
---
int32[] sequence
.action文件分为三段, 第一段是目标的数据类型定义,比如本例中,即为想要生成Fibonacci数列的长度. 第二部分定义结果数据类型,最后一段则是反馈时的数据类型.
在CMakeList.txt中加入(下面内容一部分已经在CMakeList.txt文件中, 把注释的去掉,缺少的部分加下即可):
find_package(catkin REQUIRED COMPONENTS
actionlib
actionlib_msgs
)
add_action_files(
FILES
fibonacci.action
)
generate_messages(
DEPENDENCIES
actionlib_msgs
)
# below is not essential
# catkin_package(
# INCLUDE_DIRS include
# LIBRARIES practice1
# CATKIN_DEPENDS actionlib_msgs
# DEPENDS system_lib
# )
如果在创建包时没有加入actionlib与actionlib_msgs依赖,则需要在package.xml中加入如下内容:
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
然后编译.
我们想要实现的功能是这样的, 输入Fibonacci数列长度(即目标), 服务器为们生成这样的一个数列, 如果长度太大,服务器会拒绝执行,或者当数列的最大值大于某个值时, 客户端就会放弃目标.基于此,始编写action的server与client(比如分别叫做fibonacci_server.py与fibonacci_client.py):
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
import actionlib
from practice1.msg import fibonacciAction, fibonacciFeedback, fibonacciResult
class FibonacciActionServer(object):
def __init__(self):
ros.init_node('fibonacci_server')
self.server = actionlib.SimpleActionServer('fibonacci_sequence_gen', fibonacciAction, execute_cb=self.call_back, auto_start=False)
self.rate = ros.Rate(10)
self.server.start()
ros.spin()
def call_back(self, goal):
result = fibonacciResult()
if goal.order <= 1:
tmp = [0]
elif goal.order > 45:
tmp = []
result = fibonacciResult()
result.sequence = tmp
self.server.set_aborted(result,'the order should not more than 45!')
return
else:
tmp = [0, 1]
feedback = fibonacciFeedback()
while len(tmp) < goal.order:
if self.server.is_preempt_requested():
result.sequence = tmp
self.server.set_preempted(result,'fibonacci preempted.')
return
tmp += [sum(tmp[-2:])]
feedback.sequence = tmp
self.server.publish_feedback(feedback)
self.rate.sleep()
result.sequence = tmp
self.server.set_succeeded(result, 'the complete fibonacci get!')
if __name__ == '__main__':
FibonacciActionServer()
ROS的action实现需要actionlib包, 之前.action数据格式编译生会生成相应的msg方法,即上面的fibonacciAction, fibonacciFeedback, fibonacciResult . action server由action.SimpleActionServer(name, ActionSpec,execute_cb=None,auto_start=False)构建.
其中name是服务器名字, ActionSpec 动作的数据格式, execute_cb是回调函数, auto_start=False一定设置为False, 这是ROS设计之出的瑕疵,不用管它. ros.Rate(10)设置的是反馈的频率, 之前见过多次了. 然后是开启服务器,即self.server.start(), ros.spin()以上过程在这里才开始真正执行, 并持续监听.
在call_back()中即是服务器的计算逻辑了, Fibonacci数列的计算逻辑. 从程序可以看到, 当序列长度的设定大于45服务器拒绝执行(这里主要考虑的是int32溢出的情况),然后在计算时,每计算一次就会发送一次反馈即语句self.server.publish_feedback(). 这里还会判断客端是否中断目标,即self.server.is_preempt_requested(), 如里为真, 那么服务器就会中止计算, 并发送结果即self.server.set_preempted(result,'fibonacci preempted.') 其中第二个参数是消息文本.
如果一切顺利执行,结束后,服务器会发送最终结果,即self.server.set_succeeded(result, 'the complete fibonacci get!').
下面是客户端这边的程序:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy as ros
import actionlib
from practice1.msg import fibonacciAction, fibonacciGoal
import sys
class Client(object):
def __init__(self, goal):
ros.init_node('fibonacci_client')
self.client = actionlib.SimpleActionClient('fibonacci_sequence_gen', fibonacciAction)
self.client.wait_for_server()
self.max_num = 0
self.feedback_order = 0
self.rate = ros.Rate(1000)
self.goal = fibonacciGoal()
self.goal.order = goal
self.client.send_goal(self.goal, feedback_cb=self.callback)
self.watch()
def callback(self, feedback):
self.max_num = feedback.sequence[-1]
self.feedback_order = len(feedback.sequence)
print('fibonacci: ', feedback.sequence)
def watch(self):
while self.feedback_order < self.goal.order and not self.client.get_result():
if self.max_num > 100000000:
self.client.cancel_goal()
self.client.wait_for_result()
print('[Result] state: ', self.client.get_state())
print('[Result] status: ', self.client.get_goal_status_text())
print('[Result] result: ', self.client.get_result())
return
self.rate.sleep()
self.client.wait_for_result()
print('[Result] State: %d' % (self.client.get_state()))
print('[Result] Status: %s' % (self.client.get_goal_status_text()))
print('[Result] sequence: {}'.format(self.client.get_result().sequence))
if __name__ == '__main__':
t = sys.argv[-1]
Client(int(t))
类似地, 客户端由actionlib.SimpleActionClient(name,ActionSpec)构建,只不过这里的name指的是服务器的名字. 构建好客户端后,需要连接服务器,即self.client.wait_for_server(), self.goal = fibonacciGoal(), self.goal.order = goal 与self.client.send_goal(self.goal, feedback_cb=self.callback)是在设定目标并发送目标到服务器. 回调函数主要是对反馈进行处理. self.watch()是监听函数, 其中这里可以简单的用self.client.wait_for_result()来替代.只不过,使用监听函数,可以实现更加复杂的功能,比如这里的当Fibonacci数列中的最大值超过100000000时,即取消目标.
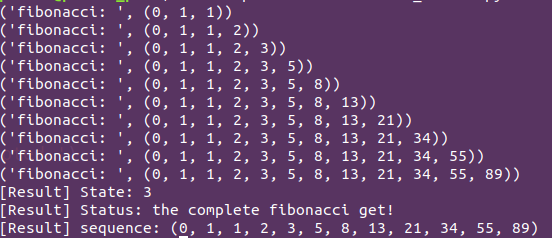
分别在三个窗口启动roscore,rosrun practice1 fibonacci_server.py 以及rosrun practice1 fibonacci_client.py 12 可以看到如下结果:
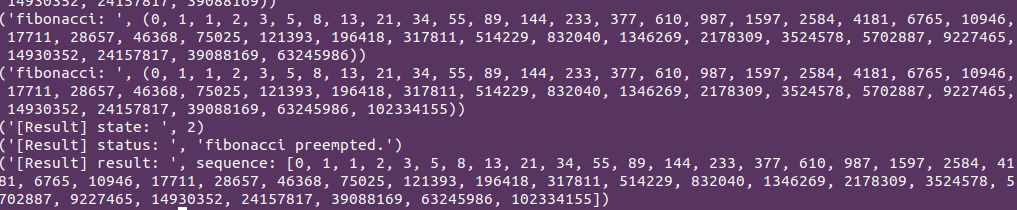
试将目标设为43可以得到类似如下结果:
如果设为50,则会得到:
