Instant Object Detection in Lidar Point Clouds
传感器:VLP-64
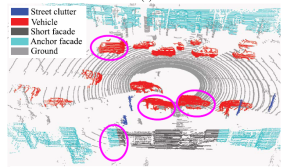
主要工作:完整的激光雷达语义环境感知方案,通过将点云投影到地面栅格图,按照点的密度和最高高度、最大高度差,将点云分为建筑物表面、低矮物体、较高物体,而后按照点云的密度变化将点云进行聚类,再讲点云按照最大面积的方向,投影为90*90的深度图,通过CNN进行分类,最后一步是按照环境的语义信息进行分类结果的纠正,修正点云聚类等造成的错误。
数据集为:需要联系作者获取密码方可下载

Pedestrian Recognition Using High-definition LIDAR 发表于2011的IEEE会议论文
文章主要是在三维点云中进行行人检测,主要关键部分有以下两点:
- 特征提取:提出了Z方向的分块点云密度作为特征,将点云块的反射强度作为特征算子的输入值,考虑了反射强度的信息,对于较远的目标,集合信息较弱的情况下,效果提升明显.
- 将之前提取的特征向量作为输入,采用SVM算法进行分类,文章的效果提升明显.
The slice feature and the distribution of the reflection intensities are proposed to improve the recognition performance at a long range with low spatial resolution. The slice feature can represent the rough profile of a pedestrian shape effi- ciently and the distribution of the reflection intensities is effective to discriminate the materials of the targets. The quantitative evaluation using real 3D range data confirms that the proposed method achieves higher performance than the Navarro-Serment method. Moreover, the proposed features can improve the classification ability at a range of more than 30 m
智能驾驶中点云目标快速检测与跟踪
本文主要是集中在目标的跟踪方面,核心过程如下:
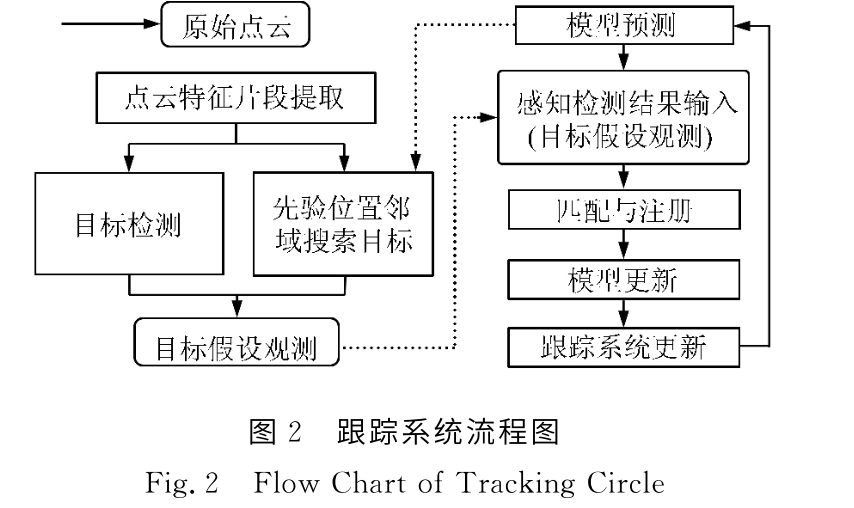
- 一是点云的快速目标检测,多线雷达的数据处理依靠单线激光雷达的数据跳跃点来描述目标,在极坐标中表示,再投影到地面来进行聚类,这样,能够去除相邻目标的粘连问题.
- 二是在数据关联时,使用形状相似和运动模式相似两张概率来计算其概率值.
- 三是在模型的运动预测过程中,用椭圆表示行人和自行车,用长方形来表示车辆,确定其运动方向.
文章的技术关键在于 目标检测与目标跟踪的相辅相成,目标检测输入前一帧数据的预测结果,在其邻域内查找目标,从而确定候选,同时,也优化了重叠等导致的信息不全和变化, 另一方面,模型检测得到的信息,通过对其运动模式的判定,可以提升其数据关联的准确率.
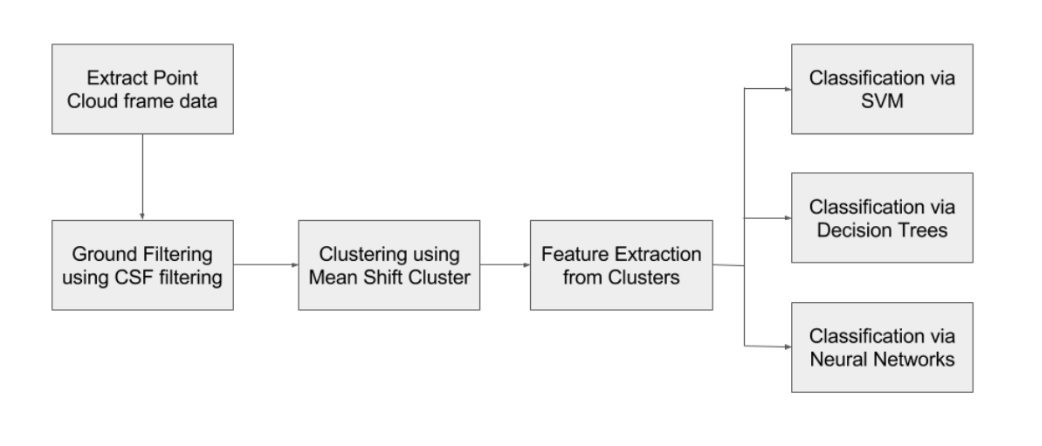
LIDAR BASED DETECTION AND CLASSIFICATION OF PEDESTRIANS AND VEHICLES USING MACHINE LEARNING METHODS
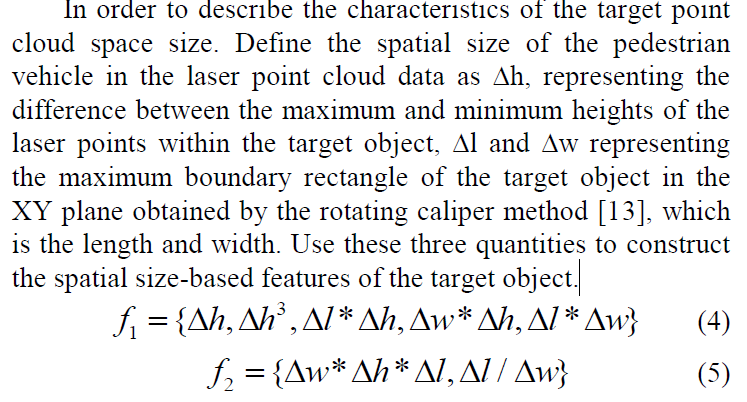
作者选取了五个特征,从今年的文献中,主要包含了box的三个方向的特征,几何体积,和基于反射强度的特征.最终的测试通过三种方法来进行测试,分别是支持向量机,神经网络和决策树算法.
In the end, we selected five features found in literature which were the following.The eigenvalues of the covariance matrix for each cluster in x, y, and z directions, the total volume of the object, and the variance in intensity of the cluster.
最终的误差,作者主要介绍了两项,一项是低于0.9的阈值导致的误差,二是点云分割过程中的阈值设计,过大,会导致多个目标的粘连,过小会导致目标被分割为几部分.
Towards 3D Object Recognition via Classification of Arbitrary Object Tracks
Improving Vehicle Detection in Point Cloud Data with Novel Features
主要的思路是地面滤除及分割聚类、选取特征、SVM的分类和最后的特征相关性分析

Vehicle and Pedestrian Recognition Using Multilayer Lidar based on Support Vector Machine
特征选取
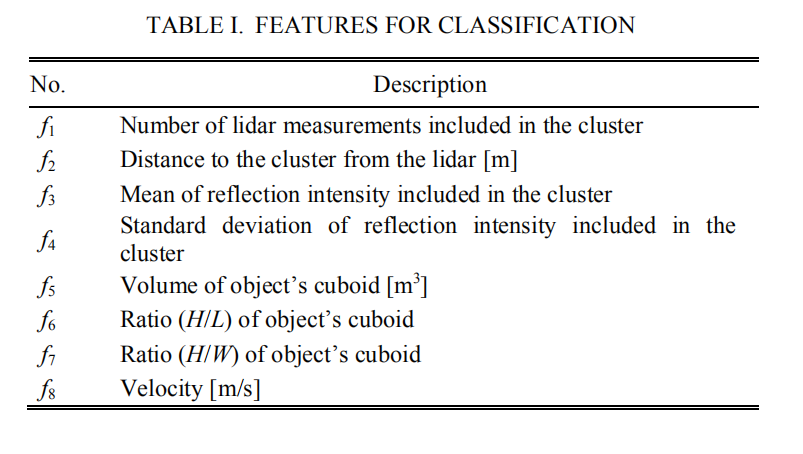
除此之外,考虑到自行车在正面和行人的相似性,使用了速度作为区分行人和自行车的特征.
Application of Random Forest Algorithm to Classify Vehicles Detected by a Multiple Inductive Loop System
基于随机森林的基于门禁电磁感应探测回波信号的目标识别系统。
Automatic Vehicle Classification using Roadside LiDAR Data
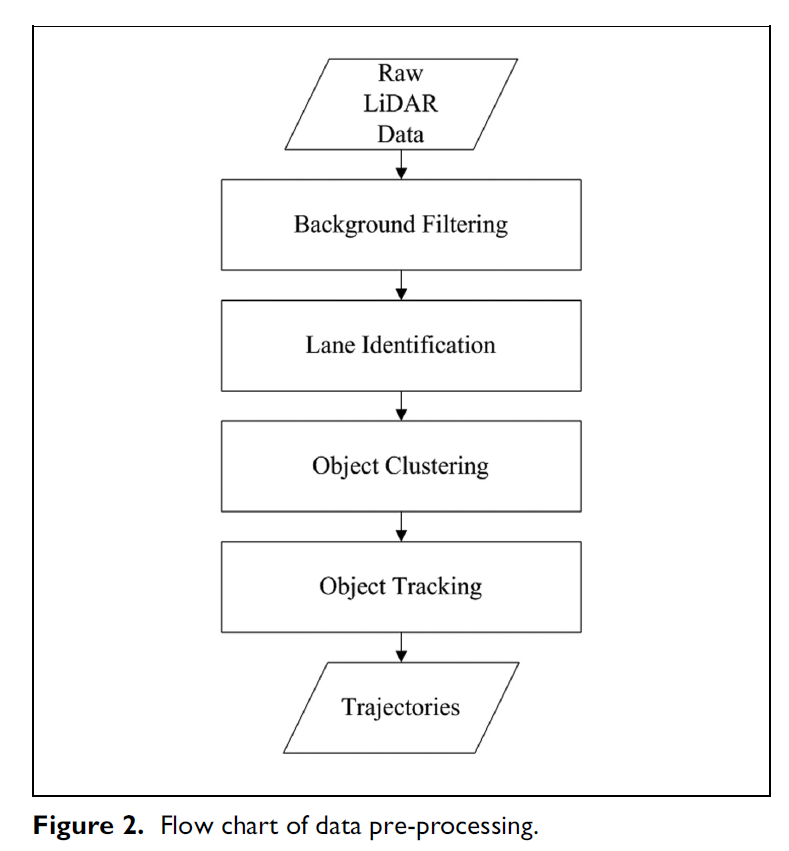
2019年新发布的论文,主要工作是通过路边缘的固定激光雷达,进行道路上车辆和行人等的识别,核心流程为:
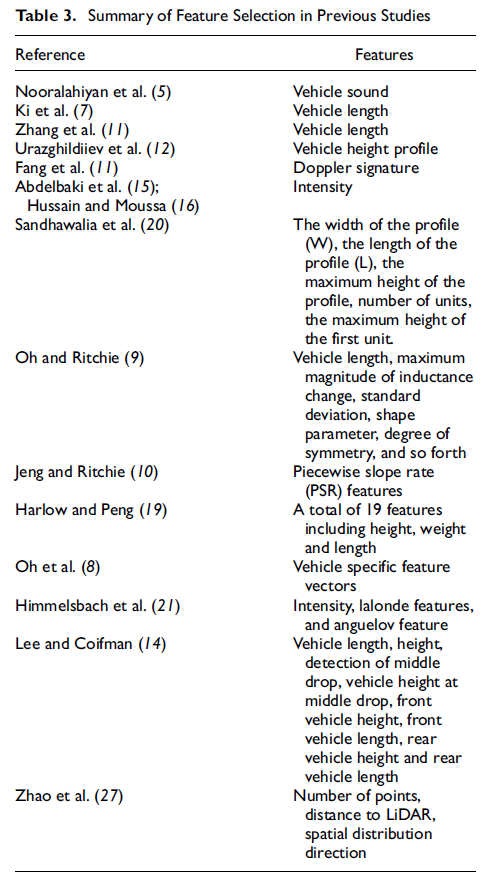
作者对目前提出的点云检测识别特征的Review:
作者实验测试了四种流行的分类方法:NB朴素贝叶斯、KNN k nearest neighbours 、 Random Forest 、SVM. 最终结论如下:
This research built a comprehensive database including point clouds, manually marked objects, and corresponding pictures, which is open to all researchers for vehicle classification methods development or improvement. Different vehicle classification methods were investigated using the database built in this study. RF has the highest overall accuracy among the investigated methods. The testing results also indicated that the distance between objects and roadside LiDAR can influence the performance of vehicle classification.