步骤:
1、创建一个
void CALLBACK OverlappedRountine(
PTP_CALLBACK_INSTANCE pInstance,
PVOID pvContext,
PVOID pOverlapped,
ULONG IoResult,
ULONG_PTR NumberOfBytesTransferred,
PTP_IO pIo)
类似的函数
2、打开一个文件
3、CreateThreadpoolIo,创建一个IO线程池
4、在调用异步操作前都调用一下StartThreadpoolIo这个函数
5、WaitForThreadpoolIoCallbacks(pIo, FALSE);表示等待到所有操作结束。如果为TRUE,则是将未完成的操作结束,并返回。
个人理解:
1、将IO完成后,返回后到的线程指定了,而且是每一个异步操作都会进入到此函数。
2、因为此线程池在内部采用了IO完成端口的方式,所以我们的操作会是顺序,因为在IO完成端口里面维护着一个队列
代码:
#include <iostream>
#include <afx.h>
#include <stdio.h>
using namespace std;
byte buf[1000];
void OutPut(byte buffer[], int num)
{
cout << "数据为:";
if(num > 0)
{
for (int i = 0; i < num; i++)
{
printf("%02X ", buffer[i]);
}
cout << endl;
}
else cout << " 空 " << endl;
}
void CALLBACK OverlappedRountine(
PTP_CALLBACK_INSTANCE pInstance,
PVOID pvContext,
PVOID pOverlapped,
ULONG IoResult,
ULONG_PTR NumberOfBytesTransferred,
PTP_IO pIo)
{
cout << "线程ID:" << GetCurrentThreadId() << endl;
OVERLAPPED overLap = *((OVERLAPPED*)pOverlapped);
OutPut(buf, NumberOfBytesTransferred);
Sleep(2000);
}
void InitCOM(HANDLE &hCOM)
{
SetupComm(hCOM, 1024, 512);
PurgeComm(hCOM, PURGE_RXABORT | PURGE_RXCLEAR | PURGE_TXABORT | PURGE_TXCLEAR);
COMMTIMEOUTS CommTimeout;
CommTimeout.ReadIntervalTimeout = 5;
CommTimeout.ReadTotalTimeoutConstant = 1000;
CommTimeout.ReadTotalTimeoutMultiplier = 5;
CommTimeout.WriteTotalTimeoutConstant = 1000;
CommTimeout.WriteTotalTimeoutMultiplier = 5;
SetCommTimeouts(hCOM, &CommTimeout);
DCB dcb;
GetCommState(hCOM, &dcb);
dcb.BaudRate = 4800;
dcb.ByteSize = 8;
dcb.Parity = NOPARITY;
dcb.StopBits = ONESTOPBIT;
dcb.fBinary = TRUE;
dcb.fParity = FALSE;
SetCommState(hCOM, &dcb);
}
void main()
{
HANDLE hCOM = CreateFile(L"COM3", GENERIC_WRITE | GENERIC_READ, 0
, NULL, OPEN_EXISTING, FILE_FLAG_OVERLAPPED, NULL);
cout << "打开COM的返回代码:" << GetLastError() << endl;
PTP_IO pIo = CreateThreadpoolIo(hCOM, OverlappedRountine, NULL, NULL);
cout << "创建线程池的返回代码:" << GetLastError() << endl;
InitCOM(hCOM);
StartThreadpoolIo(pIo);
byte data = 0x1a;
DWORD dwLen = 0;
OVERLAPPED overLap;
overLap.hEvent = 0;
overLap.Offset = 0;
overLap.OffsetHigh = 0;
WriteFile(hCOM, &data, sizeof(data), &dwLen, &overLap);
OVERLAPPED overLap2;
overLap2.hEvent = 0;
overLap2.Offset = 0;
overLap2.OffsetHigh = 0;
for (int i = 0; i < 10; ++i)
{
StartThreadpoolIo(pIo);
ReadFile(hCOM, buf, 1000, &dwLen, &overLap2);
}
WaitForThreadpoolIoCallbacks(pIo, FALSE);
CloseHandle(hCOM);
CloseThreadpoolIo(pIo);
}
结果:
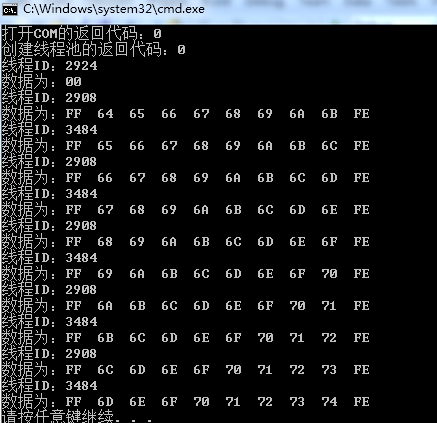
结果分析:
我们可以发现,此时更加能够体现线程池的特点。2个线程,相互交替工作。