刚来新公司不久,部门给安排了新人作业,我被分到的任务是求标准6轴机器人的正反解,以及利用就近原则选择最优解。从今天开始,逐步将这部分内容总结出来;
本文以及后续文章均使用改进DH法;
连杆坐标系:
坐标系的建立方法(摘自机器人学导论):
- 找出各个关节轴,并标出这些轴线的延长线;
- 找出关节轴i和i+1之间的公垂线或者关键轴i和i+1的交点,以关节轴i和i+1的交点或者公垂线与关节轴i的交点作为连杆坐标系{i}的原点;
- 规定Z(i)轴沿关节轴i的指向;
- 规定X(i)轴沿公垂线的指向,如果关节轴i和i+1相交,则规定X(i)轴垂直于关节轴i和i+1所在的平面;
- 按照右手定则确定Y(i)轴;
- 当第一个关节变量为0时,规定坐标系{0}和{1}重合;对于坐标系{N},其原点和X(n)的方向可以任意选取。但是在选取时,通常尽量使连杆参数为0;
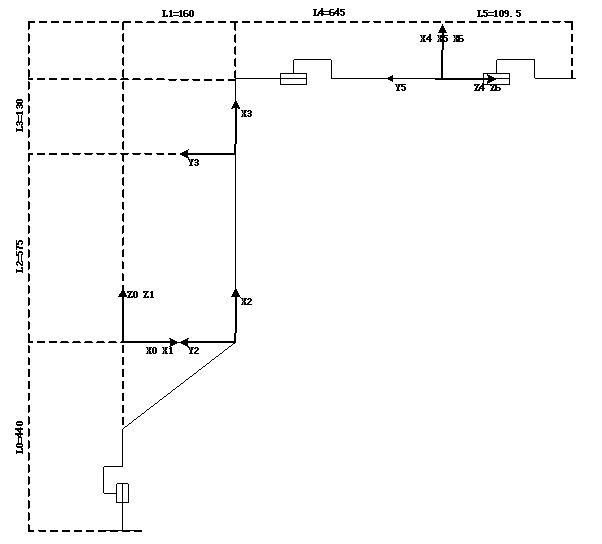
建立连杆坐标系:
公司的工业机器人都是6轴,并且都是旋转轴,基坐标系位于1轴轴线和2轴x负方向交点,4,5,6轴轴线交于一点,对其建立改进DH坐标系如下图所示(不知道为什么变形了,后面再替换原图):
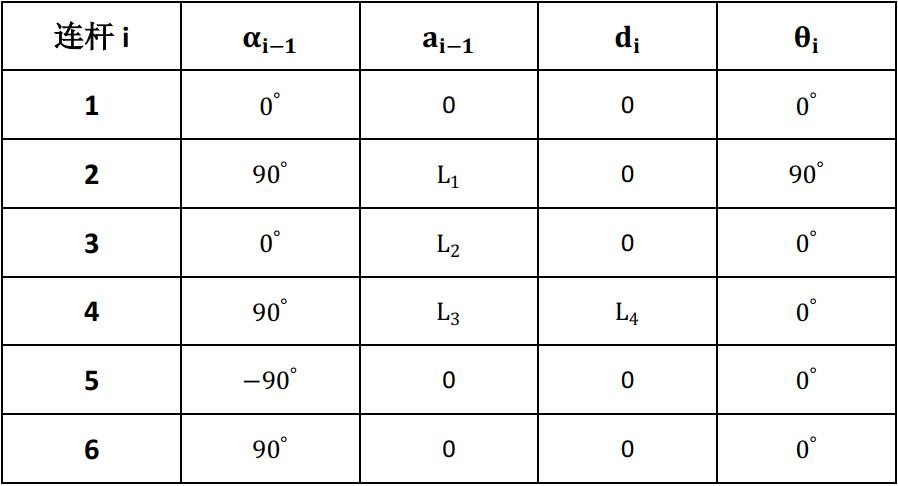
MDH参数表:
MDH的确认方法(摘自机器人学导论):
a(i) = 沿X(i)轴,从Z(i)移动到Z(i+1)的距离;
alpha(i) = 绕X(i)轴,从Z(i)移动到Z(i+1)的角度;
d(i) = 沿Z(i)轴,从X(i-1)移动到X(i)的距离;
theta(i) = 绕Z(i)轴,从X(i-1)移动到X(i)的角度;
MDH参数表:
按照上述规则,形成的MDH参数表如下: