zoukankan
html css js c++ java
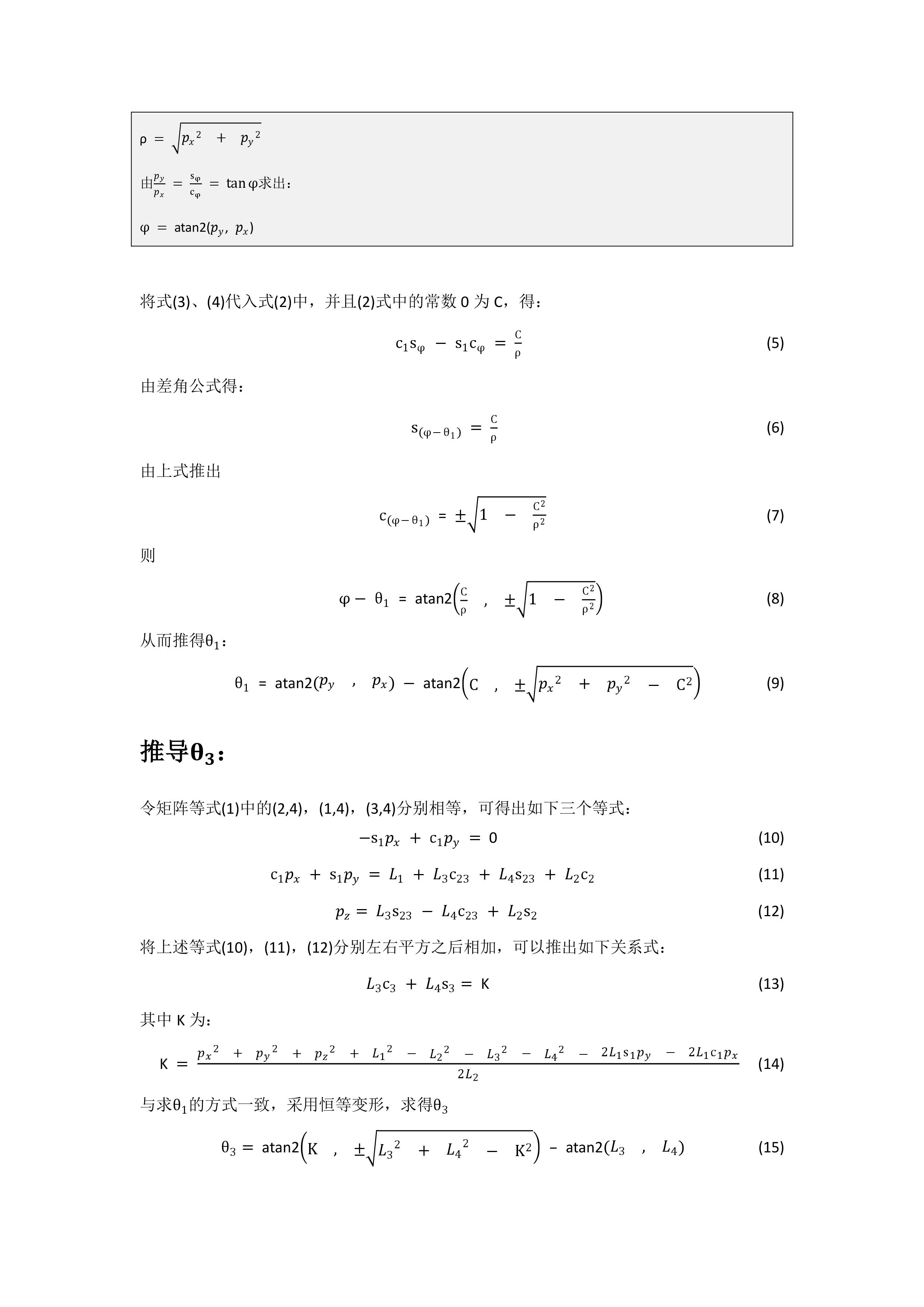
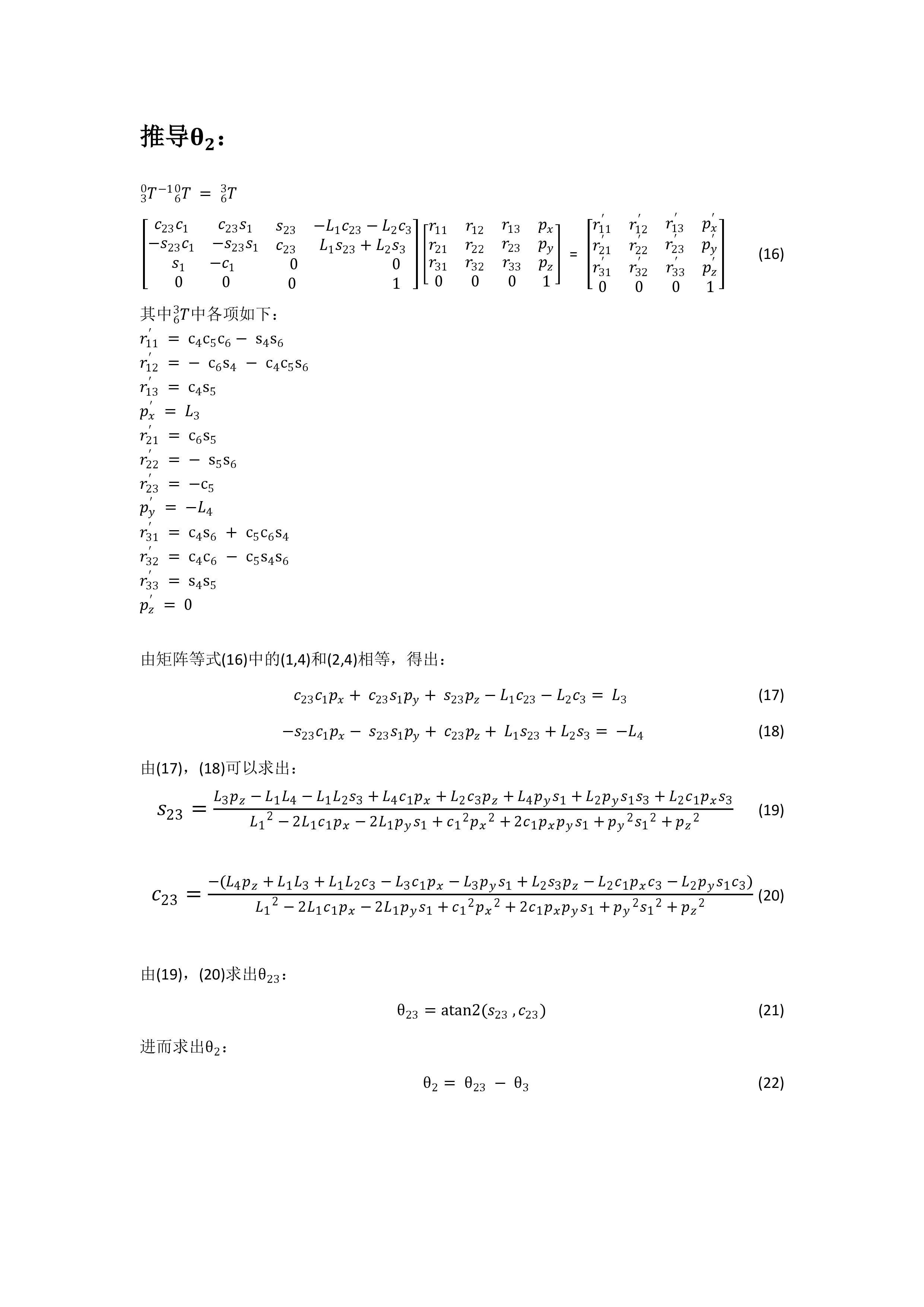
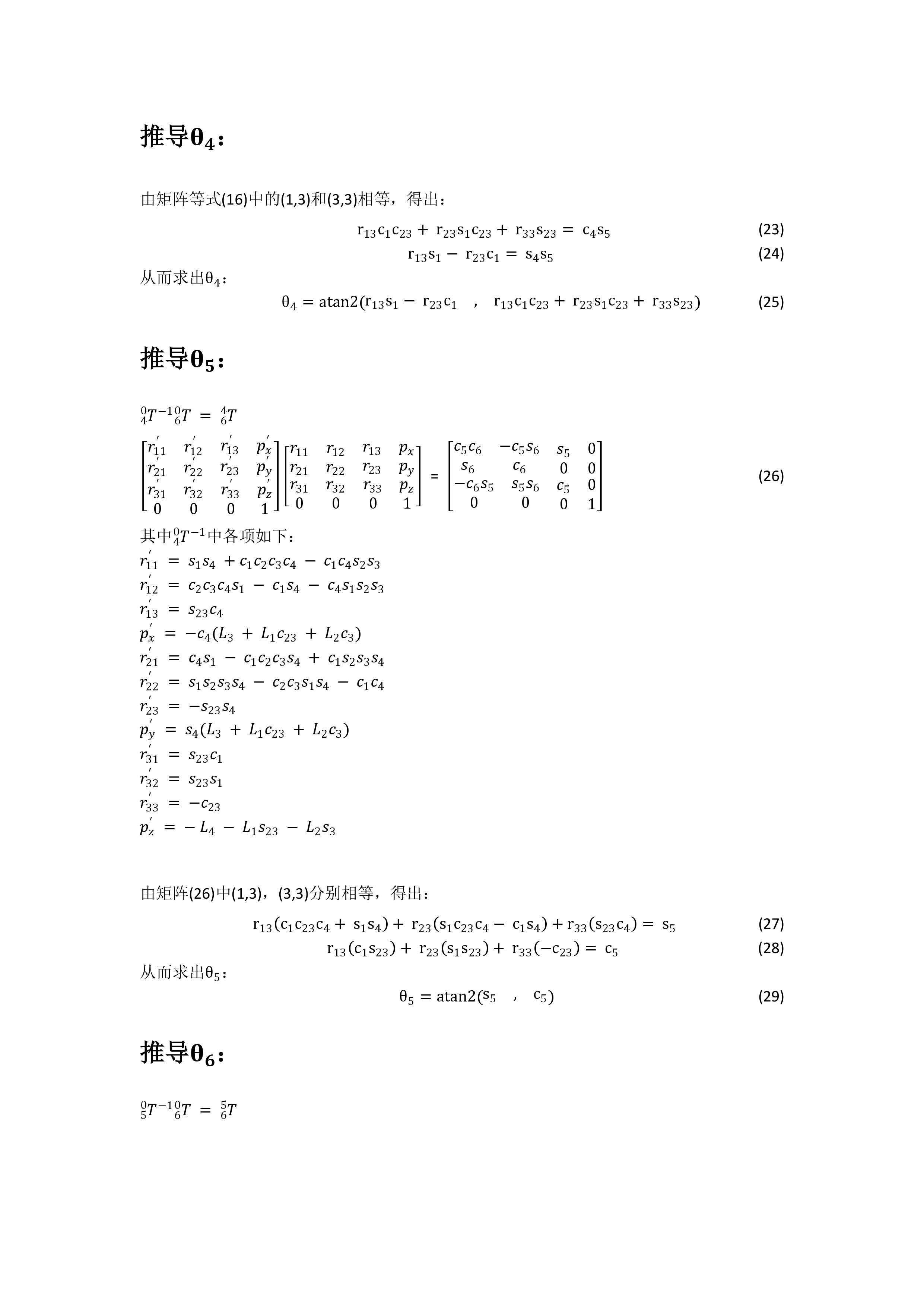
标准6轴机器人正反解(3)-反解的推导
以运动学第一篇文章中的坐标系和DH参数表为基础,可以对其反解进行推导,具体过程如下:
因公式太多,无法直接复制粘贴,故生成图片;
查看全文
相关阅读:
排序前后console.log输出无变化
Cause: java.sql.SQLException: ORA-00904: "ID": 标识符无效
无法解析Model中的实体类
generatorConfig.xml
cannot load oci dll [87/193]:
jsp页面在 移动端 自适应,chrome浏览器没问题,可是safari浏览器有问题的解决方法
【DP专题】——洛谷P1220关路灯
学习笔记:查最大内存
c++ try throw catch
Dijkstra算法
原文地址:https://www.cnblogs.com/wanpengcoder/p/11766521.html
最新文章
AS3 歌词同步
技巧
Delegate 改变指向
《笨办法学Python》 第12课手记
《笨办法学Python》 第11课手记
《笨办法学Python》 第10课手记
《笨办法学Python》 第9课手记
《笨办法学Python》 第8课手记
《笨办法学Python》 第7课手记
《笨办法学Python》 第6课手记
热门文章
《笨办法学Python》 第5课手记
《笨办法学Python》 第4课手记
《笨办法学Python》 第3课手记
关于焊板子的几个原件焊接方向问题
stm32的DMA传输一半中断
stm32的DMA基础,配置流程解析
python3报错
关于电源什么时候有电什么时候没有电
一个过程为什么要建立多个子函数来实现
SVN提交代码
Copyright © 2011-2022 走看看