个人能力有限,若有错误请批评指正!
转载请标明出处:http://www.cnblogs.com/wenhust/
激光雷达可以获得环境点云数据,机器人利用其产生的点云数据与LiDAR-based SLAM算法实现对环境的感知,因此基于激光雷达的移动机器人的环境感知准确度重要依赖于激光雷达提供点云的准确度。
一、简介
在过去,激光雷达大多应用于研究型机器人,具有扫描频率高、采样点密集的特点。与此同时,使用激光雷达的机器人移动速度较慢,因此研究人员往往对激光雷达在一个扫描周期内因移动造成的数据准确度丢失选择了忽略。目前,随着消费类机器人需求的增长,激光雷达正朝着低成本方向发展。低成本激光雷达的扫描频率低、采样点稀疏,然而移动机器人的移动速度要求却在逐渐变高,由此激光雷达在移动状态下的测量点云准确度开始变得重要。
二、问题描述
图1展示的是一个激光雷达的常见应用,机器人通过装载固定在机器人上的激光雷达从而实现对环境的感知。激光雷达通常分成固定部分和旋转部分,固定部分是用于固定在机器人或其他移动平台上;旋转部分则是利用旋转测量单元从而实现光路对环境的360°扫描,以获得整个平面环境的点云数据。在这个应用下,激光雷达是感知环境的重要传感器,由其获得的点云数据将通过SLAM算法构建起平面的栅格地图——机器人路径导航规划及避障等功能实现的基础,或者利用点云数据与已有地图信息进行匹配从而实现定位等功能,那么点云数据的准确度将直接影响到其被依赖功能的实现效果。
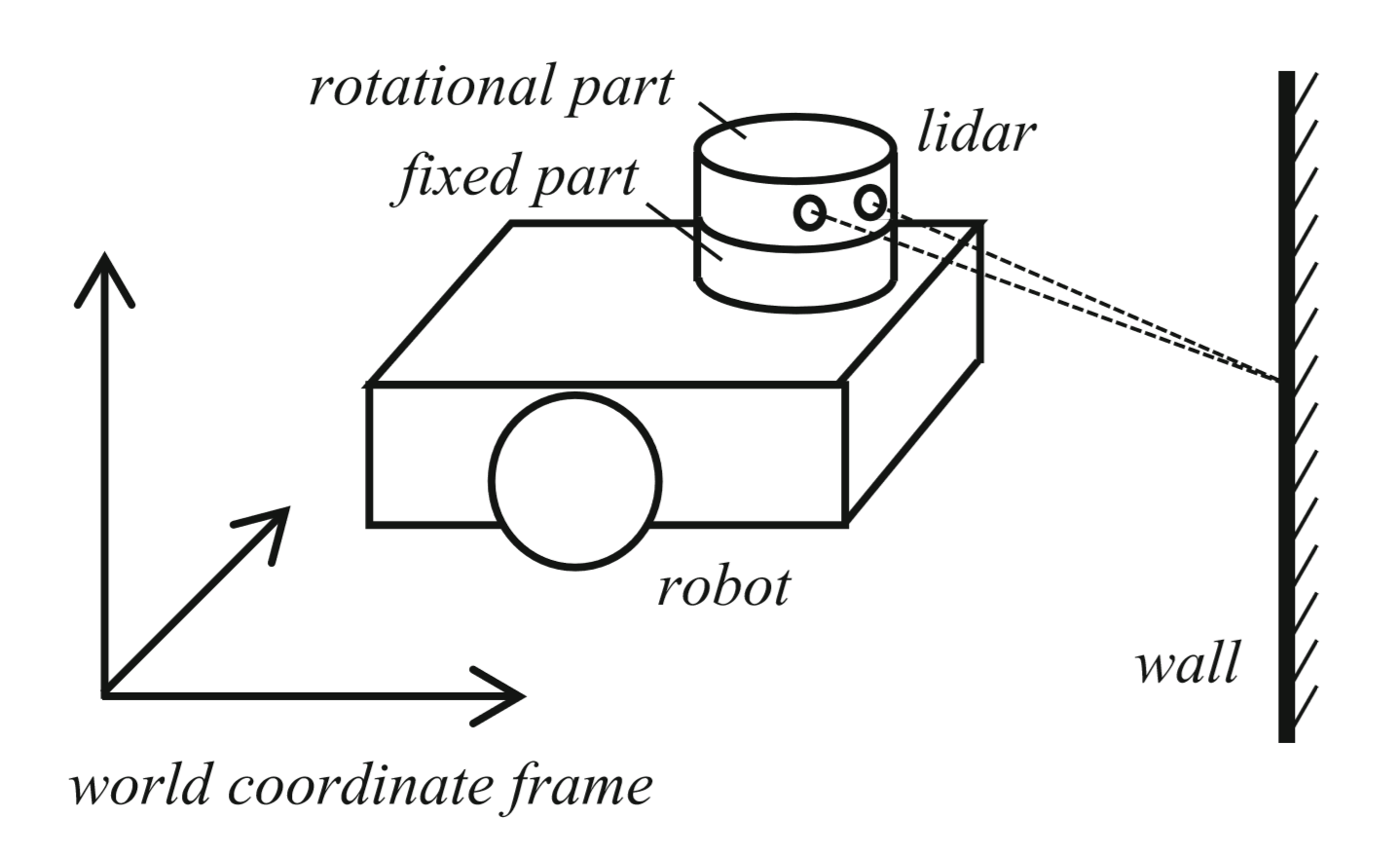
图1. 激光雷达应用示意图
激光雷达的工作方式是通过旋转可旋转部分将光路扫描到整个平面环境,在一定时间间隔下测量到被测物体的距离,从而获得整圈的测量点云数据,待整圈数据准备完毕后加时间戳提供给机器人进行运算。在这里我们举例两个对激光雷达准确度影响较大的极端情况,其一是当激光雷达可旋转部分的旋转角速度与机器人旋转角速度大小一致且方向相反时,我们可以预见激光雷达本身并没有意识到其所测量平面的点云数据其实只是恒为同一点的多次测量,如图2中情况一所示;其二是当机器人向着与其前进方向相垂直的一面墙边走边扫描,在扫描墙体的过程中机器人迅速从距墙体较远处移动到墙体附近,观察在一个扫描周期内的点云数据,我们可以预见前进方向相垂直的那面墙所形成的点云将不再与前进方向所垂直,如图2中情况二所示,与此同时其他墙面也不尽如实际的那样,只是其变形比与前进方向相垂直墙面更小。以上两种情况均随机器人角速度与速度大小变大而愈发明显。
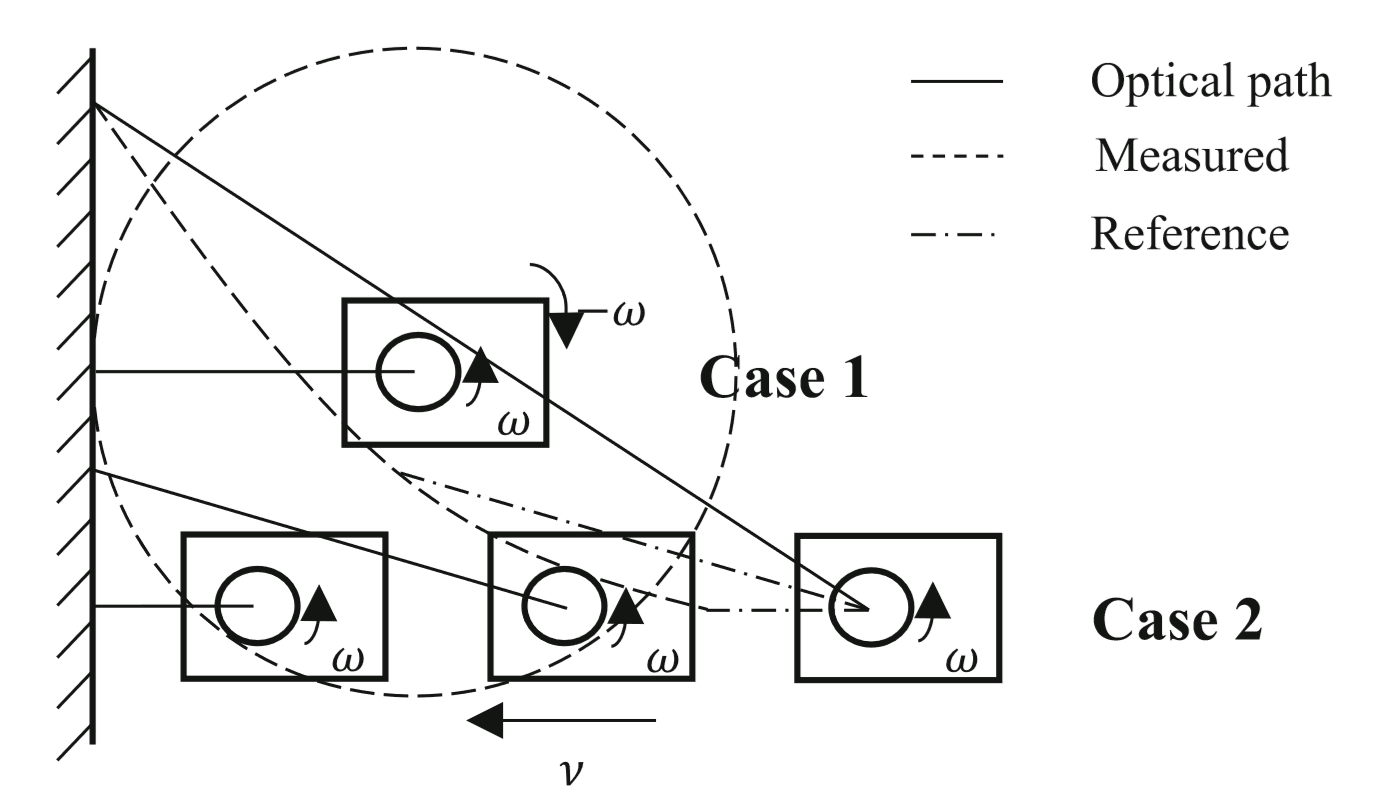
图2. 极端情况测量示意图
从这两个例子我们可以得到,当激光雷达固定部分相对于被测物体处于静止的情况下,仅有激光雷达旋转部分的旋转运动而无其他相对运动时,其给出的平面扫描点云数据接近于真实情况,误差仅为激光雷达本身测量误差。而当激光雷达处于移动状态下时,其扫描周期内的扫描运动将不仅仅包含激光雷达旋转部分的旋转运动,还有其相对被测物体因其固定的机器人所产生的平移及旋转运动。我们要做的正是将激光雷达移动状态下这些运动考虑其中,矫正激光雷达在一个扫描周期内的点云数据,使其扫描平面的点云数据更为准确地反映真实情况,从而提高激光雷达点云数据的准确度。
三、数学推导
使用笛卡尔坐标系来表示一个物体在环境中的位置和方向在机器人研究领域是一个基础方法。这里假设机器人与激光雷达各部分均为刚体,此处只考虑平面情况。无论是单线激光雷达或多线激光雷达均采集与地面平行平面数据,不考虑Z轴数据,因此可将三维坐标系简化为二维坐标系,所有数据沿Z轴投影到OXY平面进行计算。
这里将世界坐标系定义为W坐标系,机器人坐标系定义为R坐标系,激光雷达固定在机器人上,其坐标系定义为L坐标系,经过t时间后的机器人坐标系定义为R`坐标系,经过 时间后激光雷达坐标系定义为L`坐标系;P1、P2均为世界坐标系下的观测点,其中P1为计时起点时观察的目标点,P2为经过t时间后所观察的目标点。那么各坐标系间的相对位置关系如图3所示:
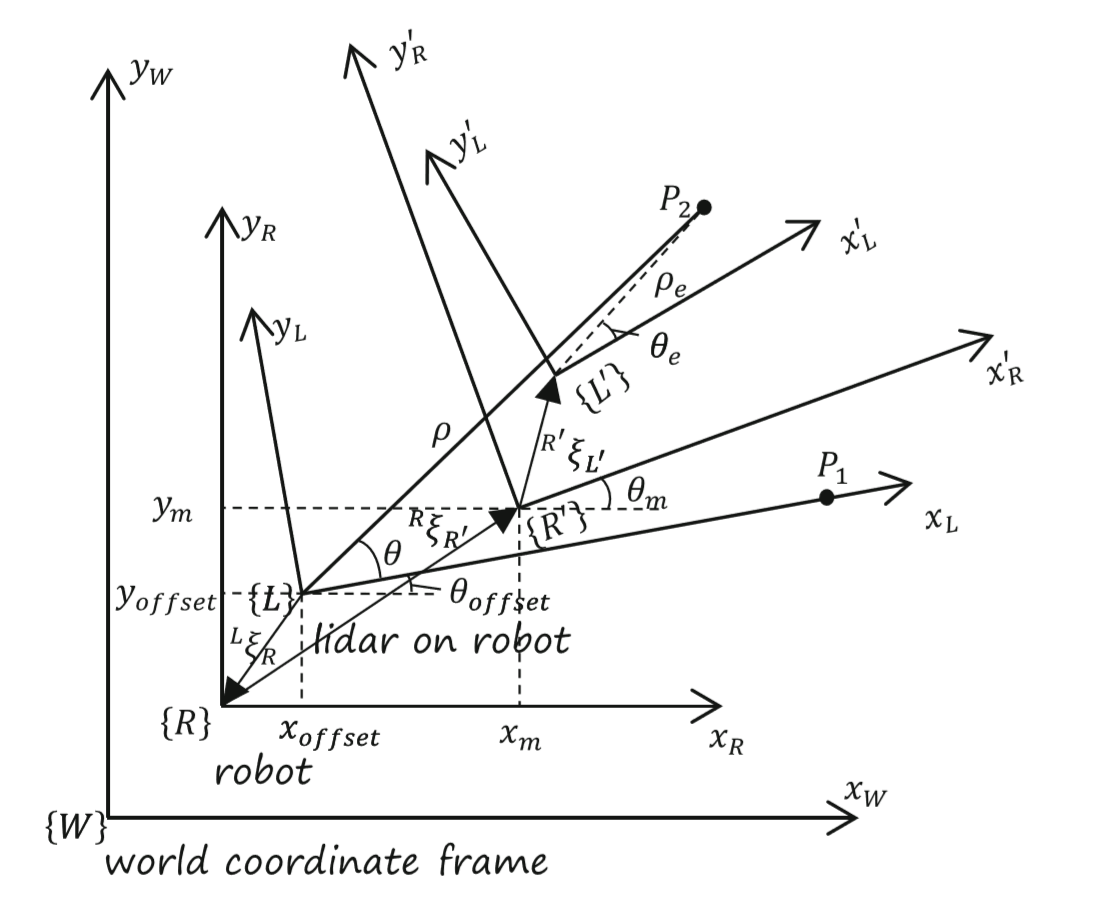
图3. 坐标系相对位置关系图
由坐标系转换关系有:

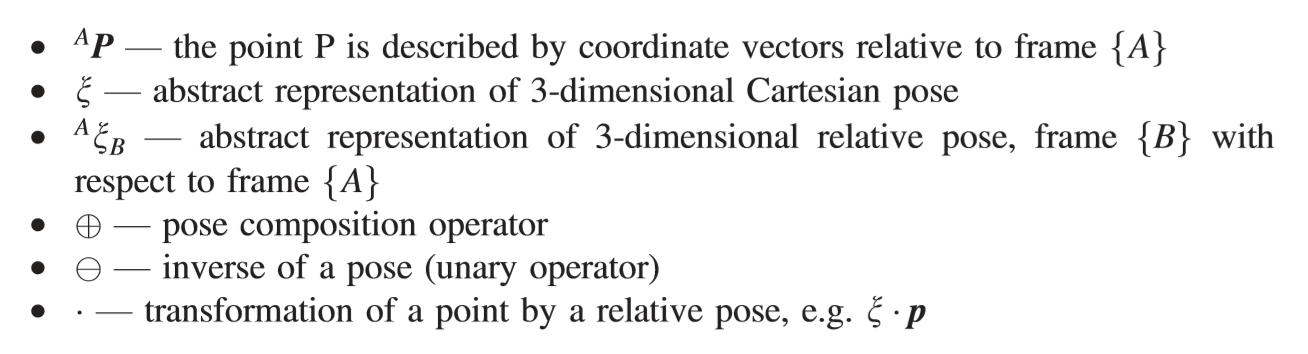
其中,各符号代表
由上述关系可得

即有
![]()
![]() 为激光雷达获取到的 观测数据,故
为激光雷达获取到的 观测数据,故
因此以时间戳为基准的t时间后,点P2的测量矫正值为 :
将激光雷达一帧中所有测量数据按照此换算到时间戳所表示时刻的坐标系下,即完成了该帧数据的矫正。
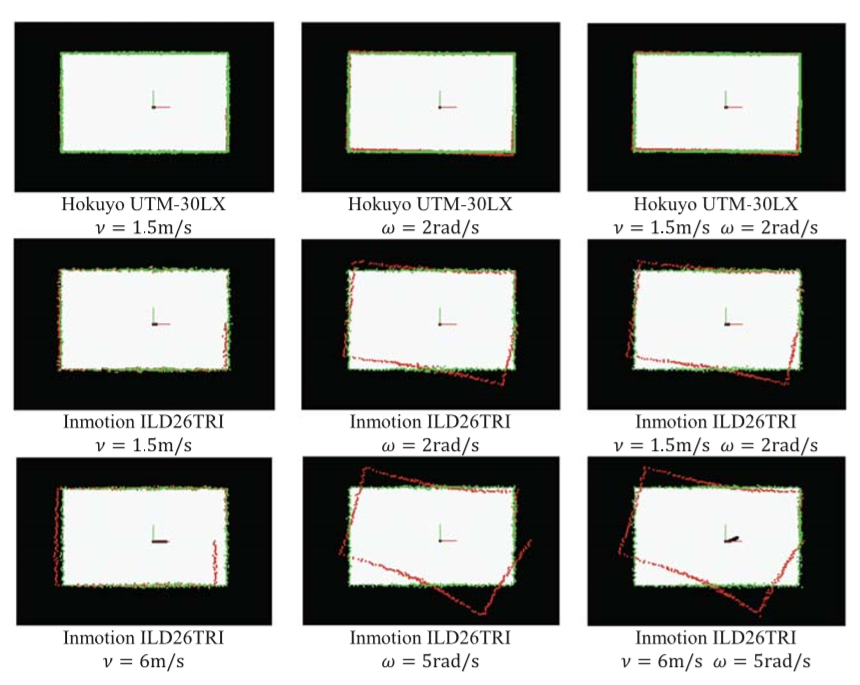
四、仿真
五、结论
从仿真结果可以看到,扫描频率和机器人移动速度是影响测量点云准确度的重要因素。扫描频率较低的激光雷达在其一帧扫描过程中于同等移动状态下的位姿变化更大,其点云准确度更差;移动速度越快对点云准确度的影响越大,与此同时,旋转运动较平移运动对点云准确度影响更大。从矫正结果看来,矫正算法虽然在一定程度上改变了点云的疏密分布,但更为准确反映真实环境。
更多细节:Bai W, Li G, Han L. Correction Algorithm of LIDAR Data for Mobile Robots[C]// International Conference on Intelligent Robotics and Applications. Springer, Cham, 2017:101-110.