PSSM(Parallel Split Shadow Map)平行分割阴影图,是一种根据距离远近采用多个深度纹理渲染阴影的方法
适合用于室外大场景中的平行光比如太阳形成的阴影
本系列需要读者了解基本的深度阴影渲染方面的知识
1 视锥划分
如下图,以采用三个划分为例:
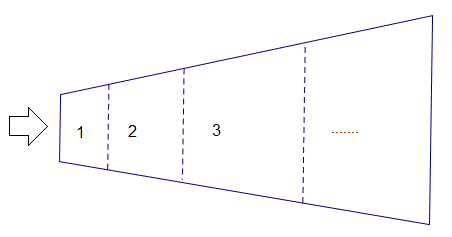
这里将视锥体平行划分为3个区域,代号分别为1、2、3
这三个区域在渲染阴影的时候分别采用不同的阴影图sm1、 sm2、sm3
这样将1、2、3对应的距离数据打包为一个float3变量splits.xyz,传入片段shader,然后通过以下的代码实现阴影图的选择:
if (z <= splits.x) { shadow = depthShadow(sm1,...); } else if (z <= splits.y) { shadow = depthShadow(sm2,...); } else if (z <= splits.z) { shadow = depthShadow(sm3,...); }
这里z 、depthShadow函数和单个深度纹理阴影的实现类似,区别是相关参数都变成了三份
图上的三个划分并没有包含全部的渲染区域,因为没有必要渲染特别远的阴影
各个阴影区域的大小可以根据需要选择合理的算法
根据实际情况也可以将阴影区域划分为两个或者更多个
为了平滑 ,最后一级阴影(本例的3)可根据z值做线性淡入淡出
2 投影矩阵计算
渲染阴影前需要分别渲染三个深度纹理
对每一个阴影区域都需要计算对应的正投影矩阵
计算正投影矩阵可以理解为计算正投影相机的位置、投影大小和相机的up矢量
下面以单个投影区域为例说明如何计算这三个要素
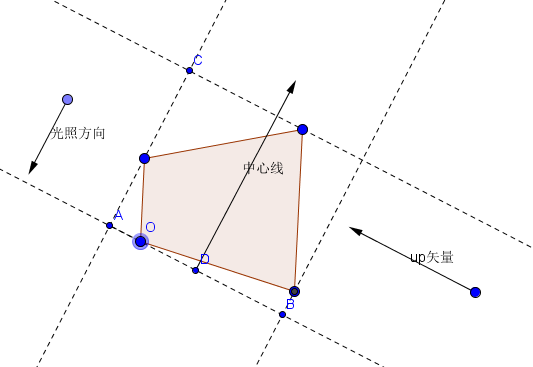
如上图,彩色阴影部分为视锥体的单个划分区域
根据当前相机的位置、FOV、纵横比和远近截面距离可以算出该视锥体的八个顶点(这里为了简化仅画出四个)
根据光照方向可以用任一垂直矢量作为投影相机up矢量,不过不同的up矢量得到的投影体大小不同,你可以设计专门的算法计算最优的up矢量
然后再通过光照方向和up矢量的叉积计算出right矢量
任选一参照点(此例为左下的O点),通过up ight矢量和光照方向可以计算出其它7个点在投影相机空间相对于O点的最大、最小值也就是最小包围盒
如图所示,相机的位置应在AB的中点D所在的中心线上,其相对于D点的距离为AC的长度加上阴影可能的投影距离(视锥体外的物体投影)
投影体的长为AB的长度,宽为right方向得到的长度(此图没画出来)
也可以将视锥体的八个顶点直接转到相机空间计算轴对称包围盒、相机位置,然后再将相机位置变换回世界空间
不过当场景很大时,正反两次变换造成的误差会非常的大,直接在世界坐标系内计算则不会有这种问题