这几天已经聊到了精密复飞,就再多聊上几句。很多时候,翻开规范就犯困,合上规范就精神,这几天在画图,才发现之前似乎没有完整通读过精密复飞章节。课本上的内容相对精简,能够帮助我们快速了解核心内容,想要了解更多细节,还是得好好读规范。这个系列的文章目标,就是比课本再简单一点,与规范结合的再紧密一点,下次再打开规范时,能够多一点点的熟悉,就是这些文章最大的贡献。
今天我们聊一下精密进近指定点转弯复飞。
一、定位点的概念
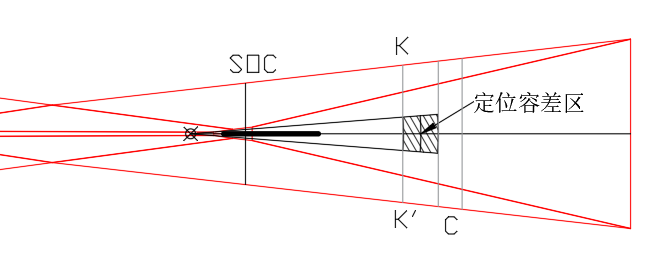
传统程序的定位点通常指的是使用VOR径向线、NDB方位线、DME弧三者的组合来得到一个确定的位置点,导航信号的重叠区域称为定位容差区。飞行程序中所说的定位点通常都是一个区域,如下图中灰色区域所示。
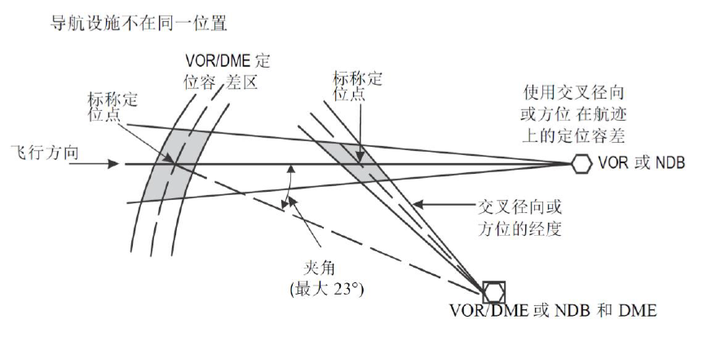
导航信号的精度用角度来表示时,参考的是下面这张表:

当航空器在向台或背台飞行时,称为有航迹引导,这种情况下计算导航台精度时,需要考虑飞行技术误差。导航台位于飞行航迹的侧方,提供交叉定位时,不用考虑飞行技术误差。上表中可以看到,提供航迹引导时,导航台的精度会降低,实际上台还同一个台,只是计算方法不一样而已(多算了一个飞行技术误差)。
目前,更常用的方式是VOR与DME合装,或是NDB与DME合装,因此,多数情况下定位点是下面的样子:
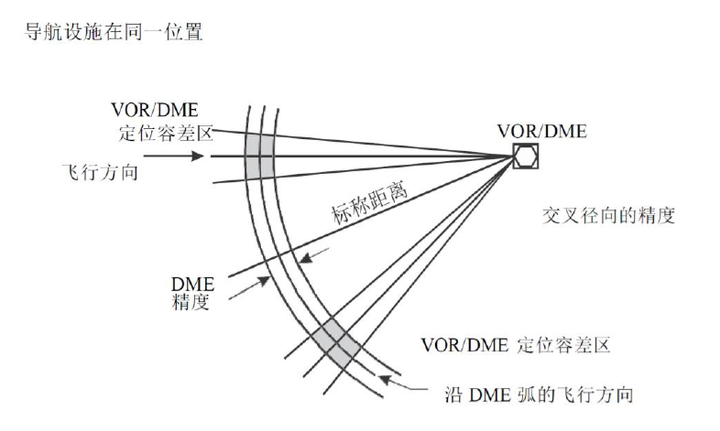
DME的精度用±460米再加上天线距离的1.25%来表示。
二、指定点转弯复飞图例分析
DOC8168中提供了下面这张图例,图中复飞转弯的转弯点(TP Turn Point 转弯点)位于OAS面Z面300米边界以内。
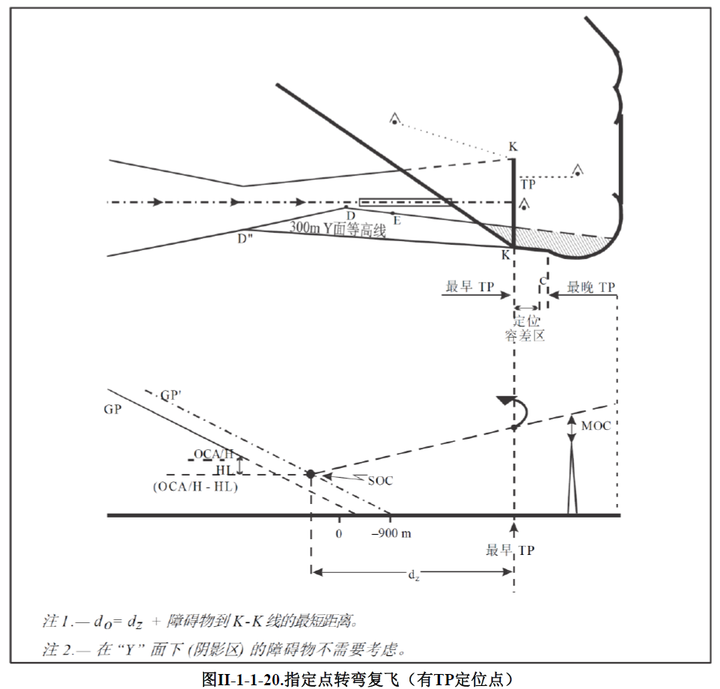
按照这张图中的内容,我们继续使用前一篇文章中的参数,对保护进行绘制。与前一篇文章内容的不同之处,是将复飞定高转弯改成指定点转弯。先来看一下还缺少哪些数据。
1)确认导航台位置及定位方式
按照之前的设定,VOR/DME台位于入口前1050米处,通过这个台来提供VOR/DME交叉定位,以之前计算的150米高度转弯的位置做定位点。
2)确认转弯高度
指定点复飞计算时使用的高度,在精密进近章节中提到“按照一般准则”执行,翻到总则复飞航段部分,提到高度“按照机场标高加300米,或指定的转弯高度“来计算。
图例中的指定点位于OAS面300米边界以内,属于精密航段标称终点前转弯。转弯区的风螺旋可以按照标高加300米来进行计算,让保护区尽量大一些,提供更多的保护。
转弯高度按照机场标高加300米计算,得到复飞转弯参数如下:
IAS = 380 km/h
Altitude = 400 m
k = 1.0459
TAS = 397.45 km/h
WindSpeed = 56 km/h
BankAngle = 15°
DraftAngle = 8.1°
R = 1.36 °/s
Radius = 4638 m
Esita = 11.4 m /°
E45 = 513 m
E90 = 1027 m
E135 = 1540 m
E180 = 2053 m
E235 = 2681 m
C6 = (v+w)*6 = 756 m
3)确认最早、最晚点
指定点转弯最早点位于定位容差的最早位置,最晚点位于定位容差最晚位置再加上C容差。这里计算的C容差值为756米。
4)添加复飞转弯保护区
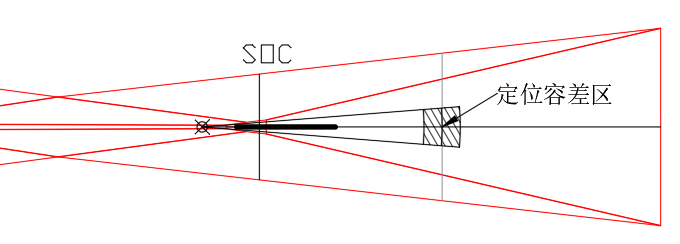
在转弯最早、最晚位置添加风螺旋,复飞转弯后飞向导航台加入等待,完成后的保护区如下图所示:

KK’线之后属于转弯区,也就是非精密航段,这部分的OAS面可进行删减。KK’线是指定点转弯的最早位置,因此,需要考虑从kk‘线开始绘制转弯的风螺旋,即上图中黑色螺旋的部分。图中红色螺旋部分是从C容差线(转弯最晚位置)开始绘制的风螺旋。
整体简化之后,得到下面的效果:

三、总结
1)保护区出图时,通常不会标注定位容差区以及不同位置的完整风螺旋。从设计的过程来看,这些步骤都是非常有必要的,可以帮助我们对设计内容进行检查,同时加深对规范细节的理解。
2)DOC8168中的复飞转弯图例,转弯之后都是飞向一个距跑道较远的位置。实际的传统程序中,多数情况下都是飞一个大转弯,回到机场导航台上空加入等待。所以,这里的这个例子可能更常见一些。
3)DOC1868图例中的风螺旋,经常是按照简易画法来绘制的,所以看起来不够平滑。在《风螺旋标准模板》软件中,已经实现了风螺旋的精确绘制,因此,这里绘制的图形看起来更平滑一些。
今天的内容就是这些,感谢关注,下次再聊。