一、一些准备工作:
1.安装Qt for VS 的插件;
安装Qt for VS 的插件
下载地址:http://download.qt.io/official_releases/vsaddin/
安装Qt 4.8.6
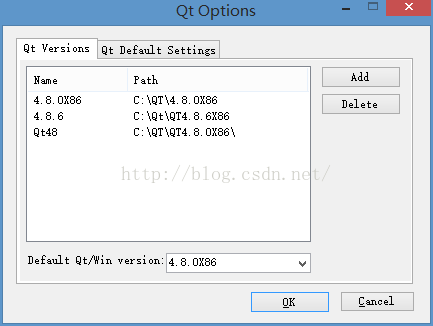
2.进行一些设置:
找到菜单项:
Qt——> Qt Option——> 选取版本
——> ——>
在工程选项中添加必须的包含文件和lib文件
然后可以使用Qt
二、工程和代码:
Vs控制台工程可以直接使用Qt的显示框架,使用类似于Qt-IDE的主函数代码:
int _tmain(int argc, char* argv[])
{
QApplication a(argc, argv);
CPlot *objViewer = new CPlot();
objViewer->show();
return a.exec();
}
头文件代码:
#pragma once
/*
*/
#include <QApplication>
#include <QMainWindow>
#include <QWidget>
#include <QAction>
#include <QMenu>
#include <QToolBar>
#include <QGLWidget>
#include <gl/glut.h>
#include <QMainWindow>
#include <QWidget>
#include <QAction>
#include <QMenu>
#include <QToolBar>
#include "OpenGLViewer.h"
class QApplication;
class QMainWindow;
class QWidget;
class QAction;
class QMenu;
class QToolBar;
class CPlot: public QMainWindow{
Q_OBJECT
public:
CPlot(QWidget *parent = 0);
//CPlot();
~CPlot(void);
//测试OpenGL画图
public:
static void RenderScene();
void SetupRC();
static void ChangeSize( GLsizei w, GLsizei h );
void drawCircle(int argc, char *argv[]);
GLfloat boundingRadius;
GLfloat LightDistanceRatio;
GLfloat rotationX;
GLfloat rotationY;
GLfloat rotationZ;
GLfloat xscale;
GLfloat yscale;
GLfloat zscale;
GLfloat transX;
GLfloat transY;
GLfloat transZ;
void draw3dAxis();
void draw3dAxis(int argc, char *argv[]);
void updatePos(const Mat &rMat);
private:
CEkfSlam m_Slamer;
private slots:
void openFile();
//void closeFile();
void segmentObj();
void capture();
private:
OpenGLViewer *openglViewer;
private:
void initializeGL();
void setMaterial();
void GLMaterial(const OpenGL::Material& material);
void setLight();
void setAntiAliasing();
float getBoundingRadius();
void setTexture(IplImage* img);
void loadTexture();
void resetGLLightPosition();
void loadMeshFile(char* filename);
void createActions();
void createMenus();
void createToolBars();
private:
QAction *loadFileAction;
QAction *closeFileAction;
QAction *segmentObjAction;
QAction *captureAction;
QMenu *fileMenu;
QMenu *toolMenu;
QToolBar *fileToolBar;
QToolBar *toolsBar;
vector<int> faceColors;
vector<QColor> FaceColorList;
vector<double>ssdf;
QPoint lastPos;
Core::Geometry::MyMesh *mesh;
int key_type;
GLuint texName;
Mat textImage;
public:
//1.使用 OpenCV Mat画图!用于显示图像和特征点匹配!
cv::Mat m_Canvas;
cv::Mat m_CanvasSrc;
private:
//2.使用 VTK画出点云!用于显示地图和方位演化!
Eigen::MatrixXf m_FeatureMap;
//画出十字光标
int cvDrawCrossCursor(
cv::Mat &Canvas,cv::Point &PointS,cv::Point &PointE,cv::Scalar &Color,int Width,int CV_A_Type,int Mark);
//画十字光标,中心点、线长度、色彩、线宽
int cvDrawCrossCursor(
cv::Mat &Canvas,cv::Point &Center,int Length,cv::Scalar &Color,int Width,int CV_A_Type,int Mark);
};
源码文件代码:
#include "StdAfx.h"
#include "Plot.h"
#include <iostream>
#include <iomanip>
#include <fstream>
#include <QApplication>
#include <QFileDialog>
#include <QString>
#include <QMenuBar>
#include <QDesktopWidget>
#include <opencv/cv.h>
#include <opencv/highgui.h>
#include <vector>
class QFileDialog;
class QString;
class QMenuBar;
class QDesktopWidget;
using namespace Qt;
using namespace OpenGL;
////此种用法是错误的,使用mainwindow之前必须构建一个Application!
CPlot::CPlot(QWidget *parent) : QMainWindow(parent){
openglViewer = new OpenGLViewer();
this->setCentralWidget(openglViewer);
this->setWindowTitle("Wishchin's PCL Window");
this->setGeometry((QApplication::desktop()->width()-1.5 *QApplication::desktop()->height())/2,20,640,480);
this->createActions();
this->createMenus();
this->createToolBars();
//初始化画布
this->m_Canvas.create(640,480,CV_8UC3);
this->m_CanvasSrc.create(640,480,CV_8UC3);
//this->m_FeatureMap.resize(0);
}
//CPlot::CPlot(){
// //初始化画布
// this->m_Canvas.create(640,480,CV_8UC3);
//
// //this->m_FeatureMap.resize(0);
//}
CPlot::~CPlot(void)
{
}
void CPlotMark0022(){}
//画出十字光标
int CPlot::cvDrawCrossCursor(
cv::Mat &Canvas,cv::Point &PointS,cv::Point &PointE,cv::Scalar &Color,int Width,int CV_A_Type,int Mark)
{
return 1;
}
//画十字光标,中心点、线长度、色彩、线宽
int CPlot::cvDrawCrossCursor(
cv::Mat &Canvas,cv::Point &Center,int Length,cv::Scalar &Color,int Width,int CV_A_Type,int Mark)
{
int H = Length/2;
cv::Point PointS;cv::Point PointE;
PointS.x =Center.x ;
PointS.y =Center.y -H;
PointE.x =Center.x ;
PointE.y =Center.y +H;
cv::line(this->m_Canvas,PointS,PointE,Color,Width,CV_A_Type,Mark);
PointS.x =Center.x -H;
PointS.y =Center.y;
PointE.x =Center.x +H;
PointE.y =Center.y;
cv::line(this->m_Canvas,PointS,PointE,Color,Width,CV_A_Type,Mark);
return 1;
}
void CPlotMark003(){}
void CPlot::draw3dAxis(int argc, char *argv[])
{
Mat rMat(1,3,CV_32F);
rMat.at<float>(0,0) = 1;
if (1<0)
rMat.at<float>(0,1) = 1;
else
rMat.at<float>(0,1) = 1;
if(1<0)
rMat.at<float>(0,2) = 1;
else
rMat.at<float>(0,2) = 1;
this->updatePos(rMat);
openglViewer->updateGL();
return;
}
void CPlot::updatePos(const Mat& rMat)
{
Mat rrMat;
rMat.convertTo(rrMat , CV_32F);
//rMat.convertTo(rMat , CV_32F);
rotationX = rrMat.at<float>(0,0);
rotationY = rrMat.at<float>(0,1);
rotationZ = rrMat.at<float>(0,2);
}
void CPlot::draw3dAxis()
{
GLfloat x = GLfloat(640) / 480;
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt(-2.0 , 6.0, -4.0, 0.0 , 0.0 , 0.0 , 0.0, 1.0 , 0.0);
float len = 0.2;
//The world axis /coordinate system!
//1. Line!
glColor3f(0.0f,0.0f,1.0f);
glBegin(GL_LINES);
glVertex3f(-2.0f,00.0f,0.0f);//X line!
glVertex3f(2.0f,0.0f,0.0f);
glVertex3f(0.0f,-2.0f,0.0f); //Y line!
glVertex3f(0.0f,2.0f,0.0f);
glVertex3f(0.0f,0.0f,-2.0f); //Z line!
glVertex3f(0.0f,0.0f,2.0f);
glEnd();
//The world axis /coordinate system!
//2. arrows!
glColor3f(1.0f,0.0f,0.0f); // x arrows
glPushMatrix();
glTranslatef(2.0f,0.0f,0.0f);
glRotatef(90.0f,0.0f,1.0f,0.0f);
glutSolidCone(0.1,0.3,10,10);
glTranslatef(0.0f,0.0f,0.4f);
glBegin(GL_LINES);
glVertex3f(-len,len,0.0f);
glVertex3f(len,-len,0.0f);
glEnd();
glBegin(GL_LINES);
glVertex3f(len,len,0.0f);
glVertex3f(-len,-len,0.0f);
glEnd();
glPopMatrix();
glColor3f(0.0f,1.0f,0.0f); // y arrows
glPushMatrix();
glTranslatef(0.0f,2.0f,0.0f);
glRotatef(-90.0f,1.0f,0.0f,0.0f);
glutSolidCone(0.1,0.3,10,10);
glTranslatef(0.0f,0.0f,0.4f);
glBegin(GL_LINES);
glVertex3f(-len,len,0.0f);
glVertex3f(0,0,0.0f);
glEnd();
glBegin(GL_LINES);
glVertex3f(len,len,0.0f);
glVertex3f(0,0,0.0f);
glEnd();
glBegin(GL_LINES);
glVertex3f(0,-len,0.0f);
glVertex3f(0,0,0.0f);
glEnd();
glPopMatrix();
glColor3f(0.0f,0.0f,1.0f); // z arrows
glPushMatrix();
glTranslatef(0.0f,0.0f,2.0f);
glRotatef(90.0f,0.0f,0.0f,1.0f);
glutSolidCone(0.1,0.3,10,10);
glTranslatef(0.0f,0.0f,0.4);
glTranslatef(0.0f,0.0f,0.4f);
glBegin(GL_LINES);
glVertex3f(-len,len,0.0f);
glVertex3f(len,len,0.0f);
glEnd();
glBegin(GL_LINES);
glVertex3f(len,len,0.0f);
glVertex3f(-len,-len,0.0f);
glEnd();
glBegin(GL_LINES);
glVertex3f(-len,-len,0.0f);
glVertex3f(len,-len,0.0f);
glEnd();
glPopMatrix();
glTranslatef(transX,transY,-transZ);
glRotatef(rotationX , 1.0,0.0,0.0);
glRotatef(rotationY , 0.0,1.0,0.0);
glRotatef(rotationZ , 0.0,0.0,1.0);
glScalef(xscale, yscale, zscale);
//The Cube aixs / coordinate system!
//1. The axis line!
glColor3f(1.0f,1.0f,1.0f);
glBegin(GL_LINES);
glVertex3f(-1.2f,00.0f,0.0f);
glVertex3f(1.2f,0.0f,0.0f);
glVertex3f(0.0f,-1.2f,0.0f);
glVertex3f(0.0f,1.2f,0.0f);
glVertex3f(0.0f,0.0f,-1.2f);
glVertex3f(0.0f,0.0f,1.2f);
glEnd();
//The Cube aixs / coordinate system!
//2. The axis arrow!
glColor3f(1.0f,0.0f,0.0f); //x arrow
glPushMatrix();
glTranslatef(1.2f,0.0f,0.0f);
glRotatef(90.0f,0.0f,1.0f,0.0f);
glutSolidCone(0.05,0.15,10,10);
glPopMatrix();
glColor3f(0.0f,1.0f,0.0f); // y
glPushMatrix();
glTranslatef(0.0f,1.2f,0.0f);
glRotatef(-90.0f,1.0f,0.0f,0.0f);
glutSolidCone(0.05,0.15,10,10);
glPopMatrix();
glColor3f(0.0f,0.0f,1.0f); // z
glPushMatrix();
glTranslatef(0.0f,0.0f,1.2f);
glRotatef(90.0f,0.0f,0.0f,1.0f);
glutSolidCone(0.05,0.15,10,10);
glPopMatrix();
////The Cube Model
//for(int i=0;i<mesh->getFCount();i++){
// glLoadName(i);
// glBegin(GL_TRIANGLES);
// double r,g,b;
// FaceColorList[1].getRgbF(&r,&g,&b);
// glColor3d(r,g,b);
// for(int j=0;j<3;j++){
// MyPoint_ p = mesh->getPoint(mesh->getFace(i).getRef(j));
// glNormal3d(p.GetNormal()[0],p.GetNormal()[1],p.GetNormal()[2]);
// glVertex3f(p.GetPoint()[0], p.GetPoint()[1], p.GetPoint()[2]);
// }
// glEnd();
//}
//glFlush();
}
//测试使用OpenGL画圆!
void CPlot::drawCircle(int argc, char *argv[])
{
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB | GLUT_DEPTH);
glutInitWindowSize (400, 300);
glutInitWindowPosition (100, 100);
glutCreateWindow( "Point examples" );
glutDisplayFunc( this->RenderScene );
glutReshapeFunc( this->ChangeSize );
SetupRC();
glutMainLoop();
return ;
}
void CPlot::RenderScene()
{
//清空颜色缓冲区,填充的颜色由 glClearColor( 0, 0.0, 0.0, 1 ); 指定为黑色
glClear( GL_COLOR_BUFFER_BIT );
//绘制一个点
{
glColor3f( 1.0f, 0.0f, 0.0f );//指定点的颜色,红色
glPointSize( 9 );//指定点的大小,9个像素单位
glBegin( GL_POINTS );//开始画点
{
glVertex3f(0.0f, 0.0f, 0.0f); // 在坐标为(0,0,0)的地方绘制了一个点
}
glEnd();//结束画点
}
//绘制一个点圆
{
glColor3f( 0.0f, 1.0f, 0.0f );//指定点的颜色,绿色
glPointSize( 3 );//指定点的大小,3个像素单位
glBegin( GL_POINTS );
{
#define PI 3.14159f
#define RADIUS 50.f
GLfloat x = 0, y = 0, angle = 0.0;
for ( angle = 0; angle <= 2.0f * PI; angle += 0.1f )
{
x = RADIUS * sin( angle );
y = RADIUS * cos( angle );
glVertex3f( x, y, 0 );
}
}
glEnd();
}
//绘制x、y坐标轴
{
glColor3f( 0.0f, 0.0f, 1.0f );//指定线的颜色,蓝色
glBegin( GL_LINES );
{
// x-axis
glVertex3f( -100.0f, 0.0f, 0.0f);
glVertex3f( 100.0f, 0.0f, 0.0f);
// x-axis arrow
glVertex3f( 100.0f, 0.0f, 0.0f);
glVertex3f( 93.0f, 3.0f, 0.0f);
glVertex3f( 100.0f, 0.0f, 0.0f);
glVertex3f( 93.0f,-3.0f, 0.0f);
// y-axis
glVertex3f( 0.0f, -100.0f, 0.0f);
glVertex3f( 0.0f, 100.0f, 0.0f);
glVertex3f( 0.0f, 100.0f, 0.0f);
glVertex3f( 3.0f, 93.0f, 0.0f);
glVertex3f( 0.0f, 100.0f, 0.0f);
glVertex3f( -3.0f, 93.0f, 0.0f);
}
glEnd();
}
glutSwapBuffers();
}
void CPlot::SetupRC()
{
glClearColor( 0, 0.0, 0.0, 1 );
glColor3f( 1.0f, 0.0f, 0.0f );
}
void CPlot::ChangeSize( GLsizei w, GLsizei h )
{
GLfloat nRange = 100.0f;
// Prevent a divide by zero
if(h == 0)
h = 1;
// Set Viewport to window dimensions
glViewport(0, 0, w, h);
// Reset projection matrix stack
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
// Establish clipping volume (left, right, bottom, top, near, far)
if (w <= h)
glOrtho (-nRange, nRange, -nRange*h/w, nRange*h/w, -nRange, nRange);
else
glOrtho (-nRange*w/h, nRange*w/h, -nRange, nRange, -nRange, nRange);
// Reset Model view matrix stack
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
}
void CPlotMark004(){}
void CPlot::initializeGL()
{
//loadTexture();
loadMeshFile("cub.off");//loadMeshFile("sword.off");//
//qglClearColor(QColor(204,204,204)/*Qt::white*/);//暂时注销,wishchin!!!
glShadeModel(GL_SMOOTH);
glClearDepth(1.0f);
glEnable(GL_DEPTH_TEST);
glEnable(GL_NORMALIZE);
glLineWidth(1.5);
//glColor3d(100,100,100);
setMaterial();
setLight();
}
void CPlot::setLight() {
GLfloat light_ambient[] = {0.0f, 0.0f, 0.0f, 1.0f};
GLfloat light_diffuse[] = {1.0f, 1.0f, 1.0f, 1.0f};
GLfloat light_specular[]= {1.0f, 1.0f, 1.0f, 1.0f};
glLightfv( GL_LIGHT0, GL_AMBIENT, light_ambient);
glLightfv( GL_LIGHT0, GL_DIFFUSE, light_diffuse);
glLightfv( GL_LIGHT0, GL_SPECULAR, light_specular);
glLightModeli(GL_LIGHT_MODEL_TWO_SIDE, GL_TRUE);
//glLightModeli(GL_LIGHT_MODEL_COLOR_CONTROL , GL_RGB);
//glLightModeli(GL_LIGHT_MODEL_COLOR_CONTROL , GL_SEPARATE_SPECULAR_COLOR);
glEnable(GL_LIGHTING);
glEnable(GL_LIGHT0);
resetGLLightPosition();
}
void CPlot::setMaterial() {
glEnable(GL_COLOR_MATERIAL);
GLMaterial(
OpenGL::Material::GetMaterial(OpenGL::Material::Default));
}
void CPlot::GLMaterial(const OpenGL::Material& material)
{
glMaterialfv(GL_FRONT, GL_DIFFUSE, material.diffuse);
glMaterialfv(GL_FRONT, GL_SPECULAR, material.specular);
glMaterialfv(GL_FRONT, GL_AMBIENT, material.ambient);
glMaterialf(GL_FRONT, GL_SHININESS, material.shininess);
glMaterialfv(GL_BACK, GL_DIFFUSE, material.diffuse);
glMaterialfv(GL_BACK, GL_SPECULAR, material.specular);
glMaterialfv(GL_BACK, GL_AMBIENT, material.ambient);
glMaterialf(GL_BACK, GL_SHININESS, material.shininess);
}
void CPlot::setAntiAliasing() {
glEnable ( GL_POLYGON_SMOOTH );
glEnable( GL_LINE_SMOOTH );
glEnable ( GL_POINT_SMOOTH );
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA,GL_ONE_MINUS_SRC_ALPHA);
glHint(GL_POLYGON_SMOOTH_HINT, GL_NICEST );
glHint(GL_LINE_SMOOTH_HINT, GL_NICEST );
glHint(GL_POINT_SMOOTH_HINT, GL_NICEST );
glEnable(GL_COLOR_MATERIAL);
}
void CPlot::setTexture(IplImage* img){
glPixelStorei(GL_UNPACK_ALIGNMENT, 1);
glGenTextures(1, &texName);
glBindTexture(GL_TEXTURE_2D, texName);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB, img->width, img->height,
0, GL_RGB, GL_UNSIGNED_BYTE, img->imageData);
glEnable(GL_TEXTURE_2D);
glTexEnvf(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_DECAL);
glBindTexture(GL_TEXTURE_2D, texName);
}
void CPlot::resetGLLightPosition() {
boundingRadius = getBoundingRadius();
GLfloat light_position[] = {0.0f, 0.0,
(float)(LightDistanceRatio*boundingRadius) , 1.0f};
glLightfv(GL_LIGHT0, GL_POSITION, light_position);
}
float CPlot::getBoundingRadius() {
//if (meshes.size() == 0) return 0;
Core::Geometry::Vector3D pmin, pmax;
//auto it = meshes.begin();
//do {
// MyMesh* last = *it;
BoundingBox box = mesh->calBoundBox();
// if (it == meshes.begin()) {
// pmin = box.min;
// pmax = box.max;
// } else {
// pmin = min(pmin, box.min);
// pmax = max(pmax, box.max);
// }
// } while ((++it) != meshes.end());
pmax = box.max ; pmin = box.min;
return sqrt(
pow(pmax[0] - pmin[0],2)+
pow(pmax[1] - pmin[1],2)+
pow(pmax[2] - pmin[2],2)
);
}
void CPlot::loadMeshFile(char* filename)
{
xscale = 1.0; yscale = 1.0; zscale = 1.0;
transX = 0.0; transY = 0.0;
faceColors.clear();
mesh->LoadFromFile(filename);
mesh->calFaceNormal();
mesh->calVertexNormal();
int fCount = mesh->getFCount();
char buf[255];
sprintf(buf, "%s", filename);
int len = strlen(buf);
buf[len-1] = 'f'; buf[len-2] = 'd'; buf[len-3] = 's';
FILE *fp = NULL;
}
void CPlotMark005(){}
//初始化坐标系,画出世界坐标系、标志BOX、Box坐标系!
void CPlot::createActions(){
loadFileAction = new QAction(tr("&Load"), this);
closeFileAction = new QAction(tr("&Close"), this);
segmentObjAction = new QAction(tr("&Segment"), this);
captureAction = new QAction(tr("Capture") , this);
connect(loadFileAction, SIGNAL(triggered()), this, SLOT(openFile()));
connect(closeFileAction, SIGNAL(triggered()), this, SLOT(close()));
connect(segmentObjAction, SIGNAL(triggered()), this, SLOT(segmentObj()));
connect(captureAction, SIGNAL(triggered()), this, SLOT(capture()));
}
void CPlot::createMenus(){
fileMenu = menuBar()->addMenu(tr("&File"));
fileMenu->addAction(loadFileAction);
fileMenu->addAction(closeFileAction);
fileMenu->addAction(captureAction);
toolMenu = menuBar()->addMenu(tr("&Tool"));
toolMenu->addAction(segmentObjAction);
toolMenu->addAction(captureAction);
}
void CPlot::createToolBars(){
fileToolBar = addToolBar(tr("&File"));
fileToolBar->addAction(loadFileAction);
fileToolBar->addAction(closeFileAction);
toolsBar = addToolBar(tr("Tool"));
toolsBar->addAction(segmentObjAction);
}
void CPlot::openFile()
{
QString filename = QFileDialog::getOpenFileName(this, tr("Load a Shape"), ".", tr("Object Model (*.obj *.off)"));
this->openglViewer->loadMeshFile(filename.toLatin1().data());
this->openglViewer->updateGL();
}
void CPlot::segmentObj(){
}
//进行数据读入
void CPlot::capture(){
//////////////////////////////////////////////////////////////////////////
// Do what you want
// example
// you can call openglViewer->updatePos(const Mat& rMat) function to show your Sensorfunsion
// result, note that once you call this function, you can just call openglViewer->updateGL()
// the re-paint the GL
// like:
char buffer[255];
//ifstream pfile("/home/hll260/aiglass/proj/firefly-3288/1.txt");
fstream pfile;
pfile.open("D://SensorFusionVector//1030.txt");
fstream outfile,outfile2;
outfile.open("D://SensorFusionVector//2.txt");
outfile2.open("D://SensorFusionVector//1103.txt");
if(!pfile)
{
printf("Can not open file!!");
_exit(1);
}
long long sp = pfile.tellg();
while(sp <= 207)
{
pfile.seekg(0,ios::end);
sp = pfile.tellg();
cout << sp << endl;
}
float ax,ay,az,gx,gy,gz;
char testgy[10];
char *gyy="Gyro";
char testac[10];
char *acc="Acce";
SensorFusion sf;
int bbbb=1;
vector <float> gyro(3,0);
vector <float> accel(3,0);
long long lastsp=0;
pfile.seekg(lastsp);
for(int i=1;i<=10;i++)
{
pfile.getline(buffer,100);
}
lastsp = pfile.tellg();
char buffer1[50];
char buffer2[50];
long linep=0;
while (1)//!pfile.eof()
{
pfile.seekg(0,ios::end);
pfile.clear();
sp = pfile.tellg();
if (linep==0)
pfile.seekg(lastsp);
else
pfile.seekg(linep);
//cout <<sp<<" "<<lastsp<<endl;
if (sp>lastsp)
{
lastsp=sp;
while(linep+144<sp)
{
pfile.getline(buffer1,40);
sscanf (buffer1,"%4s,%f,%f,%f",testac,&ax,&ay,&az);
pfile.getline(buffer2,40);
sscanf (buffer2,"%4s,%f,%f,%f",testgy,&gx,&gy,&gz);
linep = pfile.tellg();
if(strcmp(testac, acc) == 0&&strcmp(testac, testgy) == 0)
{
pfile.getline(buffer2,40);
sscanf (buffer2,"%4s,%f,%f,%f",testgy,&gx,&gy,&gz);
linep = pfile.tellg();
if(strcmp(testac, acc) == 0)
{
accel.push_back(ax);
accel.push_back(ay);
accel.push_back(az);
for (int i=0;i<3;i++)
{
accel.erase(accel.begin());
}
}
if (strcmp(testgy, gyy) == 0)
{
gyro.push_back(gx);
gyro.push_back(gy);
gyro.push_back(gz);
for (int i=0;i<3;i++)
{
gyro.erase(gyro.begin());
}
}
}
else
{
if(strcmp(testac, acc) == 0)
{
accel.push_back(ax);
accel.push_back(ay);
accel.push_back(az);
for (int i=0;i<3;i++)
{
accel.erase(accel.begin());
}
}
if (strcmp(testgy, gyy) == 0)
{
gyro.push_back(gx);
gyro.push_back(gy);
gyro.push_back(gz);
for (int i=0;i<3;i++)
{
gyro.erase(gyro.begin());
}
}
}
sf.SensorPretreatment(gyro);
sf.handlemessage(accel,gyro,0.001);
Mat rMat(1,3,CV_32F);
//弧度 转角度
rMat.at<float>(0,0) = -sf.jiaodu[1]*57.3;
if (sf.jiaodu[0]<0)
rMat.at<float>(0,1) = 360-sf.jiaodu[0]*57.3;
else
rMat.at<float>(0,1) = sf.jiaodu[0]*57.3;
if(sf.jiaodu[2]<0)
rMat.at<float>(0,2) = sf.jiaodu[2]*57.3;
else
rMat.at<float>(0,2) = sf.jiaodu[2]*57.3;
//传入三维坐标参数为绝对位置(相对于原点)
rMat.at<float>(0,3) = sf.LocX;
rMat.at<float>(0,4) = sf.LocY;
rMat.at<float>(0,5) = sf.LocZ;
openglViewer->updatePos(rMat);
openglViewer->updateGL();
outfile<<sf.jiaodu[0]*57.3<<" "<<sf.jiaodu[1]*57.3<<" "<<sf.jiaodu[2]*57.3<<endl;
cout<<sf.jiaodu[0]*57.3<<" "<<sf.jiaodu[1]*57.3<<" "<<sf.jiaodu[2]*57.3<<" "<<gyro.size()<<endl;
outfile2<<double(accel[0])<<" "<<double(accel[1])<<" "<<double(accel[2])<<endl;
outfile2<<double(gyro[0])<<" "<<double(gyro[1])<<" "<<double(gyro[2])<<endl;
outfile2<<"sp:"<<sp<<" linep:"<<linep<<endl;
}
}
else
{
continue;
}
}
outfile.close();
outfile2.close();
pfile.close();
}还有一些其他的程序段,等整理好之后再进行上传....................