讲授数据降维原理,PCA的核心思想,计算投影矩阵,投影算法的完整流程,非线性降维技术,流行学习的概念,局部线性嵌入,拉普拉斯特征映射,局部保持投影,等距映射,实际应用
大纲:
数据降维问题
PCA的思想
最佳投影矩阵
向量降维
向量重构
实验环节
实际应用
数据降维问题:
为什么需要数据降维?
①高维数据不易处理,机器学习和模式识别中高维数据不太好处理,如人脸图像32*32,1024维向量,维度太高效率低、影响精度。
②不能可视化,1024维是无法可视化的。
③维数灾难问题,开始增加维度算法预测精度会提升,但再继续增加维度预测精度反而会下降,深层次的原因是在高维空间中样本分布非常稀疏,容易产生过拟合。
④向量各个分量之间可能存在相关性,不利于后边的分析。
数据降维既可以是有监督的学习,也可以是无监督的学习。
数据降维抽象来看跟机器学习算法一样,根据一个输入向量X,预测一个输出向量Y出来,只不过Y的维数比X要低,而且Y尽可能的保持X的信息。
总体上把数据降维分为:
线性降维,映射函数是线性函数
非线性降维,映射函数是非线性函数
PCA的思想:
在线性降维里边最经典的是主成分分析PCA,它基于最小化重构误差的思想。
寻找一个投影矩阵W,左乘X,WX——>Y,将X从高维空间映射到低维空间,但是它保留了高维数据的某些结构信息,使得重构的误差最小化,就是可以根据Y把X重构回来,就像数据压缩算法,压缩完了可以解压缩,解压缩以后要损失比较小。它是怎么做的,它是向数据的主要变化方向投影。

如图,在黑色斜线垂直方向上数据变化比较小,于是将数据投影到黑色斜线上。如三维空间一个在Z轴方向波动很小的平面,就可以将其投影到XY平面。投影完了以后尽量保留原始数据的信息。
最佳投影矩阵:
投影矩阵W怎么获得,WX——>Y,它的目标是最小化重构误差。
推导分两步:
①把X投影到1维空间
假设有一组样本X1,X2,...,Xn,都用同一个向量X0来代替他,X0取多少时它的重构误差最小呢,把重构误差定义为均方误差(残差平方和),

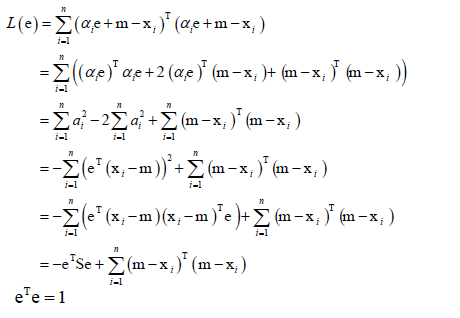
求重构误差最小值,对X0求偏导,
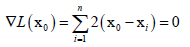
得到X0,
 ,这里m就是X0。即X0是所有样本的均值的时候,重构误差是最小的,这也符合我们直观的看法,回归决策树中叶子节点设置为样本的均值时它的误差是最小的。
,这里m就是X0。即X0是所有样本的均值的时候,重构误差是最小的,这也符合我们直观的看法,回归决策树中叶子节点设置为样本的均值时它的误差是最小的。
前边用同一个向量代替所有的向量,这样误差也太大了,因为我们把所有向量的差异都抹杀掉了,强制等于他们所有样本的均值。
现在考虑最简单的情况,比上一个复杂一点,把所有向量投影到一维空间里边去,怎么投影?
 ,m是所有样本的均值,在均值向量上对每个向量再加上一个aie,e是一个单位向量,就像坐标轴一样,把所有样本投影到e坐标轴上去,投影的坐标就是ai,只要求出ai和e,就成功把所有样本投影到了一维空间。
,m是所有样本的均值,在均值向量上对每个向量再加上一个aie,e是一个单位向量,就像坐标轴一样,把所有样本投影到e坐标轴上去,投影的坐标就是ai,只要求出ai和e,就成功把所有样本投影到了一维空间。
定义误差: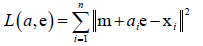 ,ai和e取什么值时误差最小呢?求得误差最小时的ai和e的值,就是样本要投影的方向及投影的坐标,所有样本投影方向e是同一个方向,而投影坐标ai是不同样本坐标不同。
,ai和e取什么值时误差最小呢?求得误差最小时的ai和e的值,就是样本要投影的方向及投影的坐标,所有样本投影方向e是同一个方向,而投影坐标ai是不同样本坐标不同。
求误差最小化分为两步:
先把e当做一个一个常数,看ai取什么值时误差能够最小化,则求L对ai的偏导数,令其等于零。
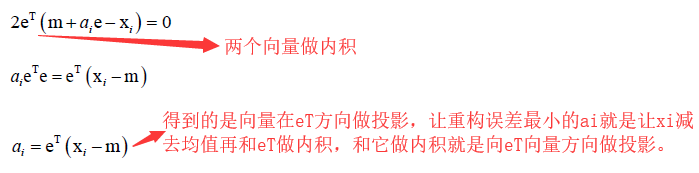
这样就解出了ai,现在只剩下e这个变量,就可以使L最小化,

化简得:
其中S称为散度矩阵,它是协方差矩阵的n倍,
相当于优化eTSe最大化,因为L(e)的第二项和e、ai无关,还有一个约束条件,eTe=1,因为e是单位向量。于是就转化为求带等式约束的一个二次函数的极值,因为S是二次型(?这点不明白为什么是二次型),展开之后就是二次函数。对于求解带等式约束的极值问题,可以用拉格朗日乘数法来构造拉格朗日乘子函数 ,要优化的变量是e和λ,首先对e和λ求偏导数,由于XTAX对X求偏导的结果为2AX(前提是A是对称矩阵),而XTX对X求偏导的结果是2X,于是L(e,λ)对e求偏导为-2Se+2λe=0,解方程就可以把e求出来,得到Se=λe,即e是S的特征向量,最优的投影方向e可能就是S的特征向量,特征向量不止一个取哪一个合适呢?
,要优化的变量是e和λ,首先对e和λ求偏导数,由于XTAX对X求偏导的结果为2AX(前提是A是对称矩阵),而XTX对X求偏导的结果是2X,于是L(e,λ)对e求偏导为-2Se+2λe=0,解方程就可以把e求出来,得到Se=λe,即e是S的特征向量,最优的投影方向e可能就是S的特征向量,特征向量不止一个取哪一个合适呢?
S是一个对称半正定矩阵:

实对称阵一定可以对角化,实对称阵属于不同特征值的特征向量是相互正交的,半正定矩阵能保证它所有的特征值大于等于零,即λi≥0,我们取最大特征值对应的特征向量e,因为目标是最大化eTSe,又eTSe=λeTe=λ,即最大值为最大的那个λ,所以e就是最大特征值对应的特征向量。所以主成分分析把向量投影到一维空间里的话,最佳投影方向就是最大特征值对应的那个特征向量,要把特征向量单位化掉。
②把这种做法推广到高维d'维空间
前边是把向量投影到一维空间里,把它推广到d'空间,这里d'远小于原先向量的维度d,即x∈Rd,d'<<d。
把向量投影到d'空间之后, ,ei是正交积(即eiei=1,eiej=0),于是重构误差
,ei是正交积(即eiei=1,eiej=0),于是重构误差
优化的目标是最小化误差,化简可得最小化目标是 ,其中W不是方阵,约束条件是让W的行之间相互正交或列之间相互正交。WTSW,其中S是d×d矩阵,则WT的尺寸为d'×d,同样和前边一样的思路最终得到最优解是S对应最大的d'个特征值对应的特征向量,把这些向量按行(或按列)拼接成一个矩阵,这个矩阵就是最佳投影矩阵W(若按行拼接,则W尺寸为d'×d),WX就是将向量X从d维降到d'维向量。
,其中W不是方阵,约束条件是让W的行之间相互正交或列之间相互正交。WTSW,其中S是d×d矩阵,则WT的尺寸为d'×d,同样和前边一样的思路最终得到最优解是S对应最大的d'个特征值对应的特征向量,把这些向量按行(或按列)拼接成一个矩阵,这个矩阵就是最佳投影矩阵W(若按行拼接,则W尺寸为d'×d),WX就是将向量X从d维降到d'维向量。
总结:无论将向量投影到一维还是高维,都要求解散度矩阵S的特征值和特征矩阵,在实现的时候一般用协方差矩阵C代替S(C=1/nS)。
完整的算法流程:
计算投影矩阵的流程:
1.计算所有样本向量的均值向量,并将所有向量减去均值向量,这一步称为白化。
2.计算样本协方差矩阵,cov矩阵。
3.计算协方差矩阵的特征值与特征向量,计算出所有的特征值和特征向量
4.将特征值从大到小排序,保留最大的一部分特征值和特征向量,构成投影矩阵
PCA投影的流程:
1.计算所有样本的均值向量
2.所有样本减掉均值向量,然后再计算协方差矩阵
3.对协方差矩阵进行特征值分解,得到特征值和对应的特征向量
4.将减掉均值后的向量与特征向量矩阵相乘,得到投影结果,即W(X-m),m是均值向量
还有另外一个过程,叫做向量重构,即已知投影以后的Y求X,则让Y左乘WT再加上m就得到X。
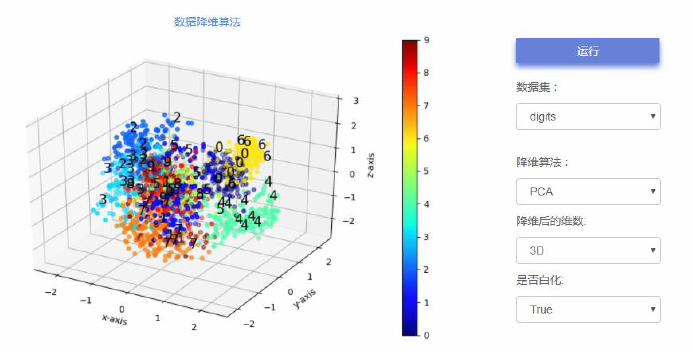
实验环节:
手写数字样本投影到二维2D:

手写数字样本投影到三维3D:
实际应用:
PCA是一个非常通过且古老的算法,在工程和科学的数据分析,包括机器学习、模式识别领域,都得到了大规模的应用,很多时候如果出现向量维数很高的时候,首先想到的就是用PCA给它降维。
比如说在模式识别和机器学习中有几个典型的地方:
人脸识别,特征脸算法,它就是把人脸的图像拼接起来形成一个大的向量然后投影到d维空间里边,然后再用其他算法进行分类,如K近邻、最近邻、支持向量机等。
其他数据降维
PCA计算量还是很大的,如人脸图像32×32拼接起来是1024维的向量,计算协方差矩阵或散度矩阵就是1024×1024的一个矩阵,计算它的特征值和特征向量时的运算量还是很大的。
本集总结: