一、概述
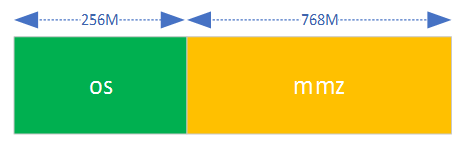
如图所示,在海思平台上将内存分为两个部分:os内存和mmz内存。os内存指:由linux操作系统管理的内存;mmz内存:由mmz驱动模块进行管理供媒体业务单独使用的内存,在驱动加载时可以指定该模块管理内存的大小:
insmod mmz.ko mmz=anonymous,0,0x4fa00000,6Manony=1 || report_error
该驱动主要由两个文件组成:media-mem.c和mmz-userdev.c,加载驱动后相应的设备文件:/dev/mmz_userdev,应用层通过打开该设备文件进行ioctl(申请mmz内存、释放mmz内存、重映射mmz内存到内核等)和直接mmap操作,而媒体底层驱动模块则直接调用mmz驱动的导出接口进行相应操作。
二、数据结构
1、mmz区域描述符
hil_media_memory_zone描述了一个mmz区域的所有信息,可以有多个mmz区域,通过链表连接在一起。
struct hil_media_memory_zone {
char name[HIL_MMZ_NAME_LEN+1]; //mmz区域名字:anonymous
unsigned long gfp; //区域标识:0
unsigned long phys_start; //mmz区域起始物理地址:0x4fa00000
unsigned long nbytes; //mmz区域大小:6M
struct list_head list; //mmz链表
unsigned char *bitmap; //位图
struct list_head mmb_list; //mmz区域的mmb链表,存放所有申请到的物理内存
unsigned int alloc_type;
unsigned long block_align;
void (*destructor)(const void *);
};
2、mmb内存描述符
hil_media_memory_block描述了从mmz区域申请一块内存,同一个mmz区域内的所有mmb通过链表连接。
struct hil_media_memory_block {
#ifndef MMZ_V2_SUPPORT
unsigned int id;
#endif
char name[HIL_MMB_NAME_LEN+1]; //该mmb模块使用者名字
struct hil_media_memory_zone *zone; //指向mmb所属的mmz区域
struct list_head list; //mmb链表
unsigned long phys_addr; //申请到的mmb起始物理地址
void *kvirt; //对应内核虚拟地址,从代码看未用
unsigned long length; //申请的mmb大小
unsigned long flags; //标识
unsigned int order;
int phy_ref; //引用计数
int map_ref; //引用计数
};
3、mmz_userdev_info
该结构体保存打开该设备文件的进程信息,存放在file结构体的private_data成员里。
struct mmz_userdev_info {
pid_t pid; //打开设备文件的进程pid
pid_t mmap_pid;
struct semaphore sem; //信号量
struct list_head list; //指向mmb_info链表
};
4、mmb_info
该结构体描述应用申请到mmb后的相关信息,同进程的mmb_info通过链表形式管理。
struct mmb_info {
unsigned long phys_addr; //申请到的物理内存,同mmb.phys.addr
unsigned long align; /* ifyou need your phys-memory have special align size */
unsigned long size; //申请的物理内存大小
unsigned int order;
void *mapped; //指向mmap后的虚拟地址空间
union {
struct {
unsigned long prot :8; /*PROT_READ or PROT_WRITE */
unsigned long flags :12;/* MAP_SHARED or MAP_PRIVATE */
#ifdef __KERNEL__
unsigned long reserved :8; /* reserved, do not use */
unsigned long delayed_free :1;
unsigned long map_cached :1;
#endif
};
unsigned long w32_stuf;
};
char mmb_name[HIL_MMB_NAME_LEN+1];
char mmz_name[HIL_MMZ_NAME_LEN+1];
unsigned long gfp; /*reserved, do set to 0 */
#ifdef __KERNEL__
int map_ref;
int mmb_ref;
struct list_head list; //mmb_info链表
hil_mmb_t *mmb; //指向申请到的mmb
#endif
};
三、关系图
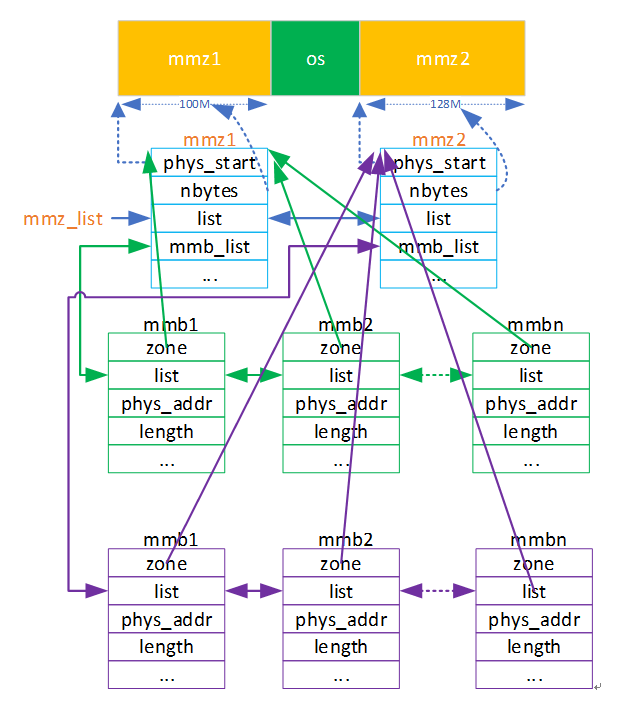
1、mmz和mmb关系
下图展示了mmz驱动管理mmz和mmb的关系。mmz驱动模块支持多个mmz区域,只要在加载mmz.ko时通过参数传递即可,一般情况下只有一个mmz区域。多个mmz区域之间通过链表的形式组织在一起,链表头为mmz_list;而每个mmz区域通过mmb_list维护mmb链表,管理该区域内所有已经申请了的物理内存区域;每个mmb通过zone成员知道自己属于哪个mmz区域。
通过/proc/media-mem可以查看mmz和mmb使用情况:
+---ZONE: PHYS(0x4FA00000, 0x4FFFFFFF),GFP=0, nBYTES=6144KB, NAME="anonymous"
|-MMB: phys(0x4FA00000, 0x4FA81FFF), kvirt=0x (null), flags=0x00000000, length=520KB, name="DCCM_MSG_BUF"
|-MMB: phys(0x4FA82000, 0x4FA84FFF), kvirt=0x (null), flags=0x00000000, length=12KB, name="SYS_scale_coef"
|-MMB: phys(0x4FA85000, 0x4FA87FFF), kvirt=0x (null), flags=0x00000000, length=12KB, name="SYS_scale_coef"
|-MMB: phys(0x4FA88000, 0x4FB07FFF), kvirt=0x (null), flags=0x00000000, length=512KB, name="TDE_MemPool"
|-MMB: phys(0x4FB08000, 0x4FB3CFFF),kvirt=0x (null), flags=0x00000000,length=212KB, name="IVE_QUEUE"
|-MMB: phys(0x4FB3D000, 0x4FB3DFFF), kvirt=0x (null), flags=0x00000000, length=4KB,name="IVE_TEMP_NODE"
---MMZ_USE_INFO:
total size=6144KB(6MB),used=1272KB(1MB +248KB),remain=4872KB(4MB + 776KB),zone_number=1,block_number=6
2、mmb、mmb_info和mmb_userdev_info关系
下图展示了mmz驱动和应用申请数据结构之间的关系:
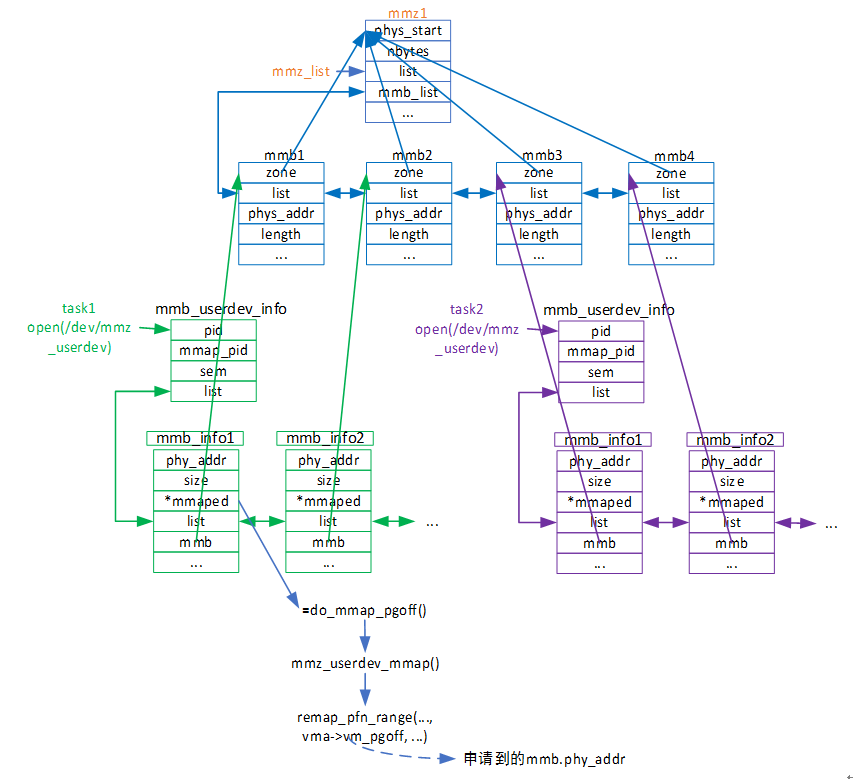
当应用打开设备文件/dev/mmz_userdev时会申请一个属于该进程的mmb_userdev_info结构体,mmb_userdev_info成员list指向属于该进程的所有mmb_info,mmb_info的mmb成员指向为其分配的mmb,而*mmaped存放mmb物理内存(phy_addr)进行映射后的虚拟地址供用户空间使用。
由于mmz大部分为媒体业务独立使用,内存在媒体硬件模块流转,应用无需访问,这时不用映射,只有当应用需要访问时才需要进行映射。可以把mmz管理的整个内存看做存储盘上的一个大文件,应用层要访问mmz的物理内存通过mmap方式进行映射(类似文件),映射的文件偏移就是mmb.phy_addr,映射大小就是申请的mmb.length,通过mmap方式映射到内核后根据返回的虚拟地址就可以访问该mmb内存。