5.Apollo ROS原理3
四大主要内容
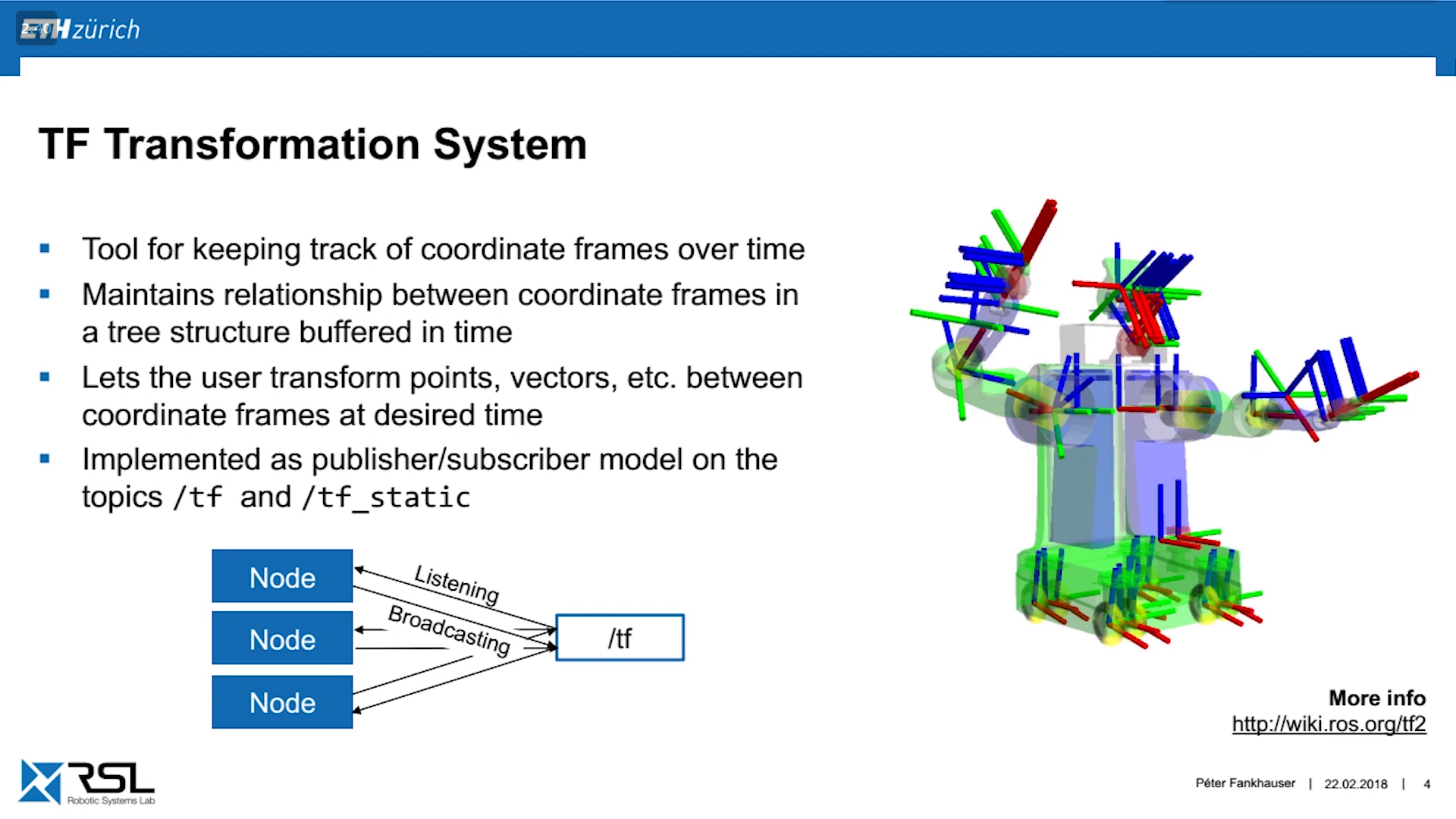
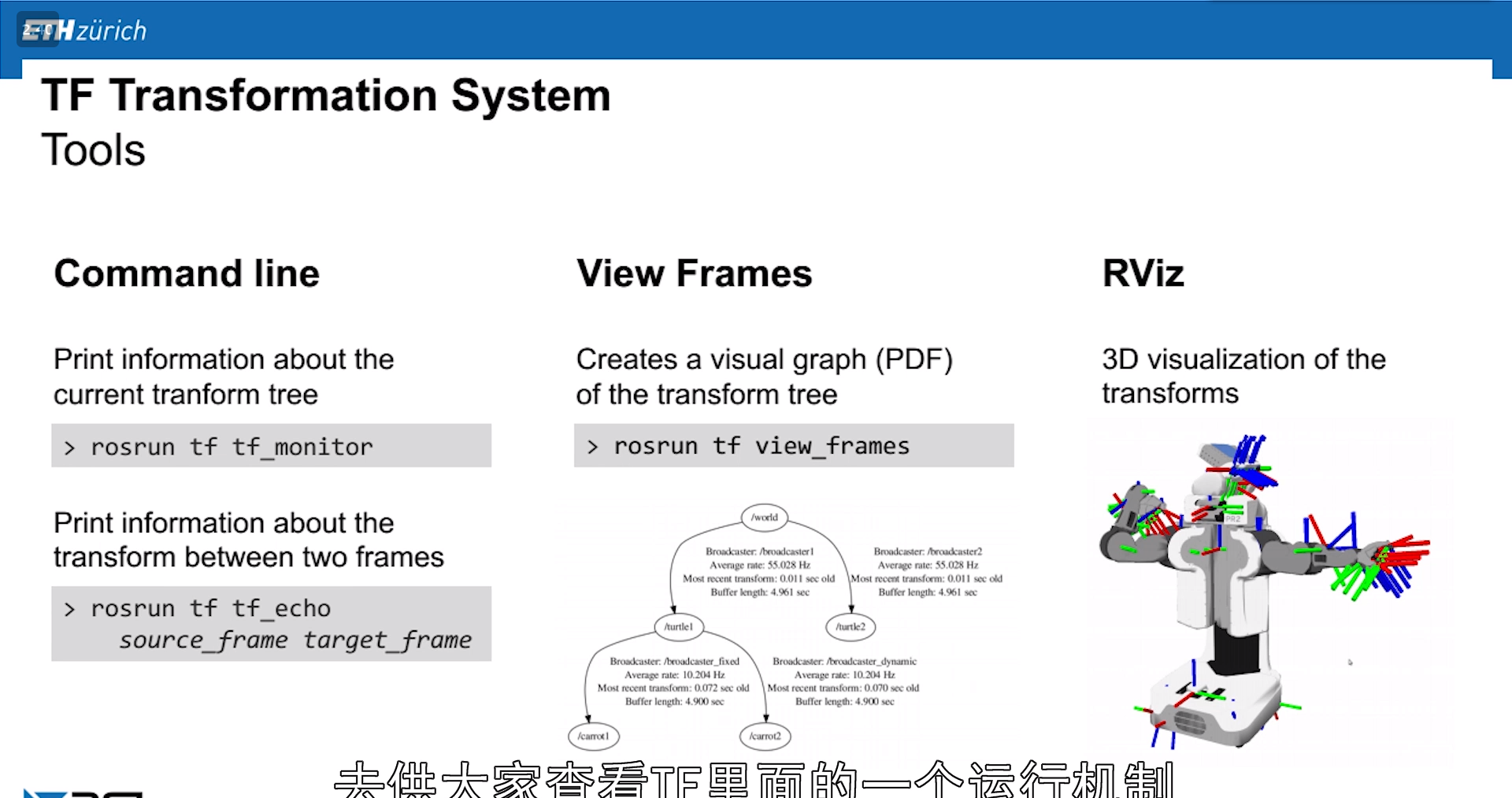
1.TF坐标系转换
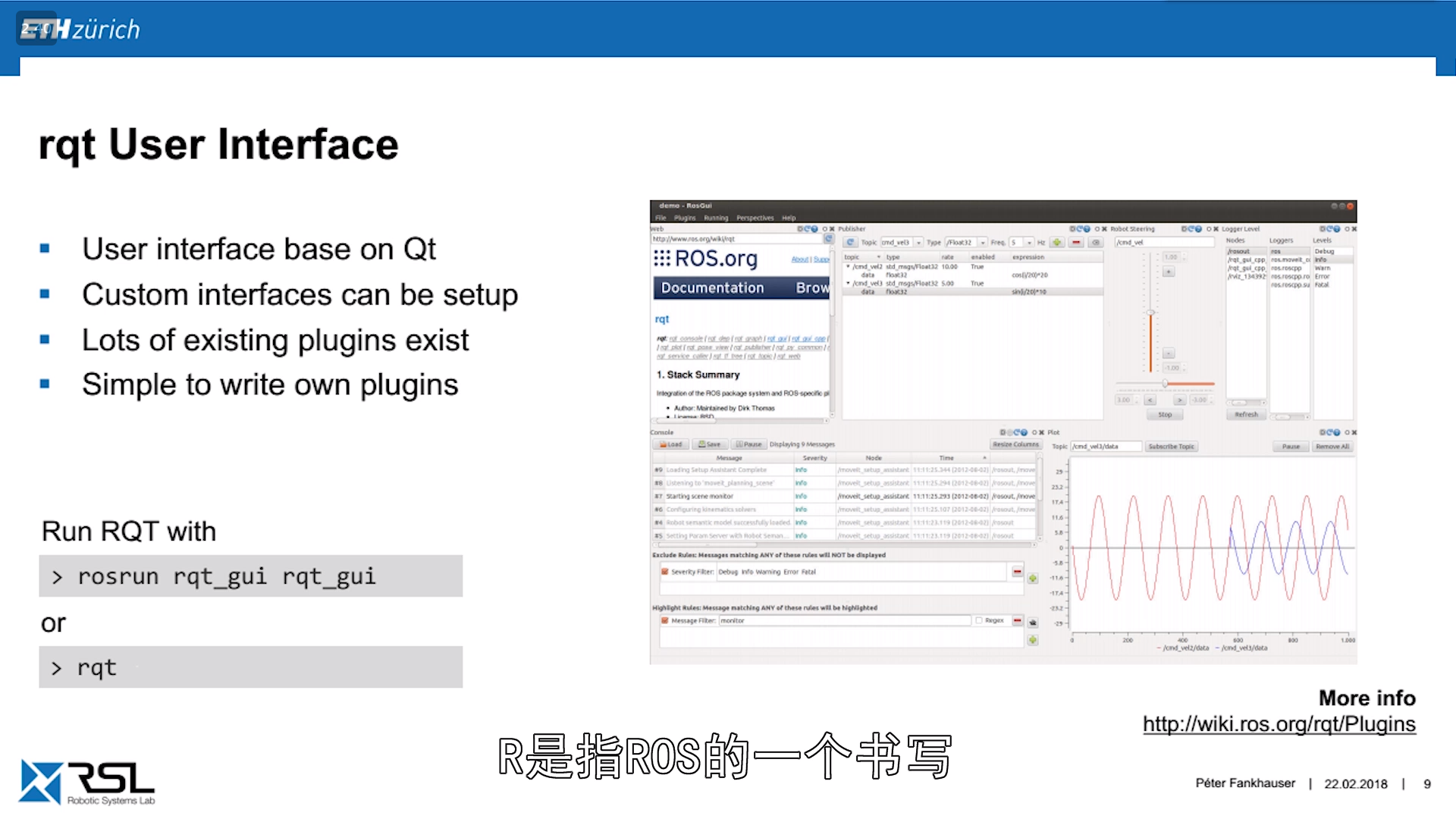
2.RQT 用户接口
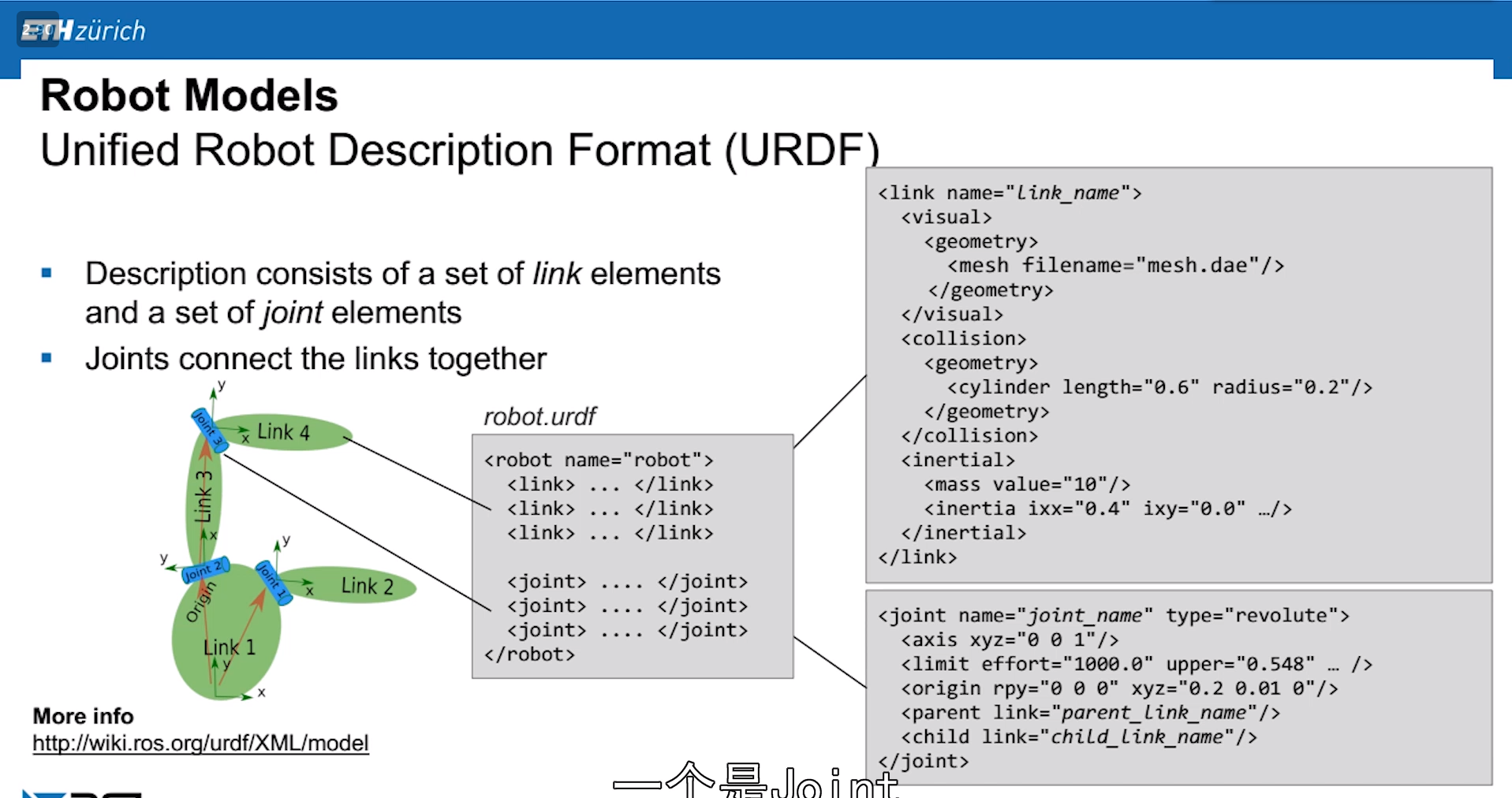
3.robot models (URDF)
4.simulation descriptions (SDF)
1.TF坐标系转换
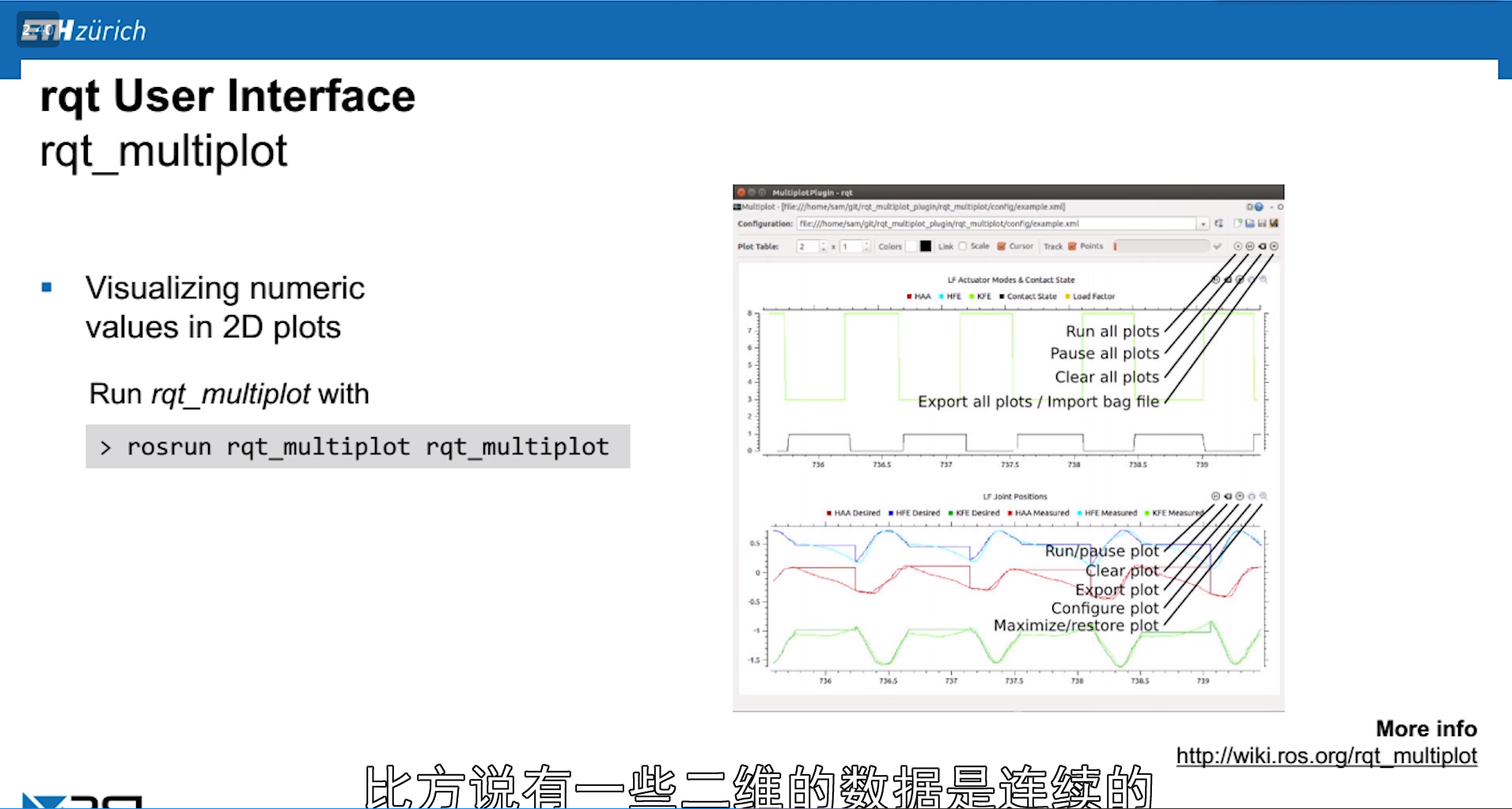
2.RQT 用户接口
rqt_image_view

rqt_multipot
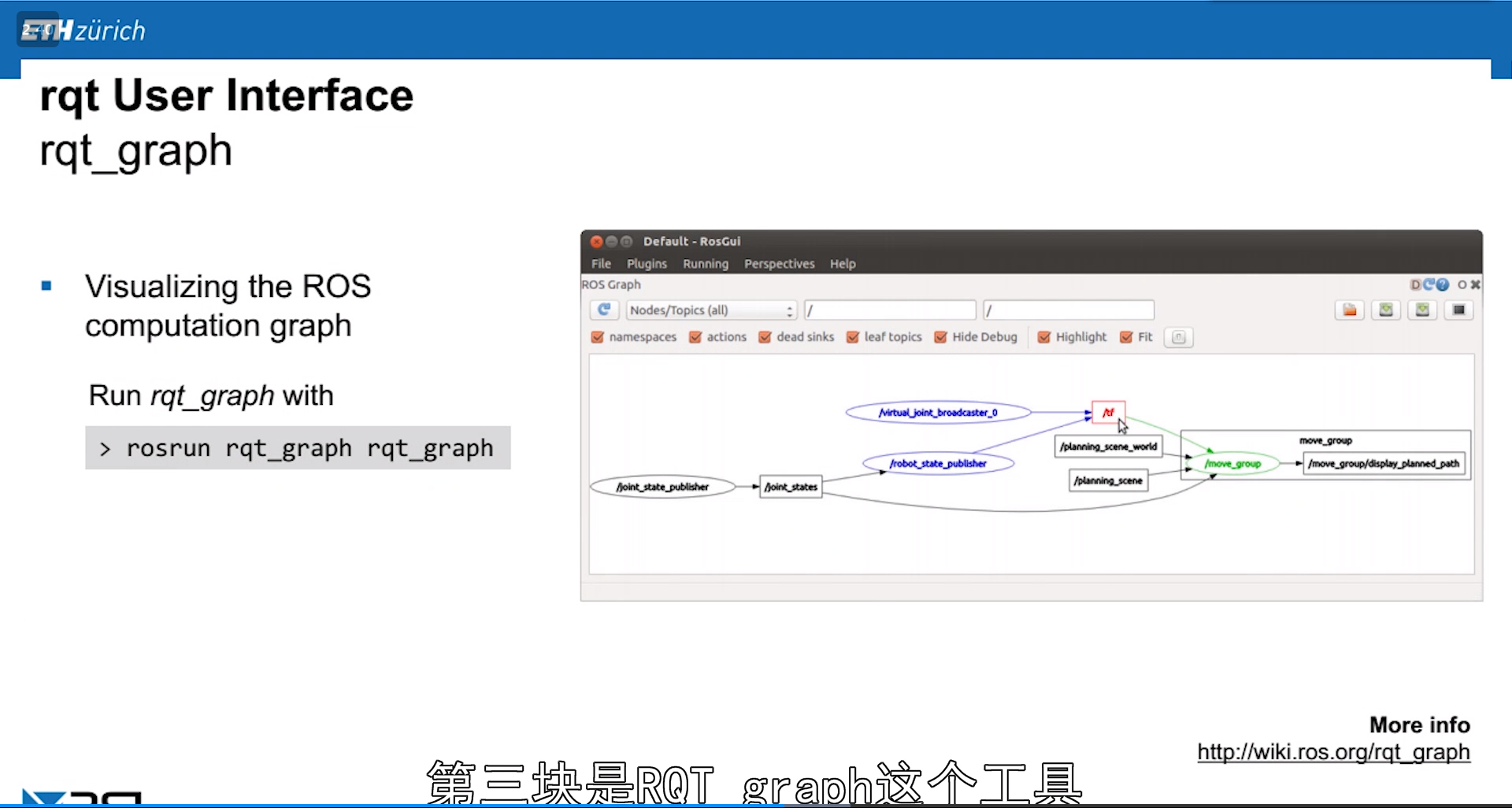
rqt_graph
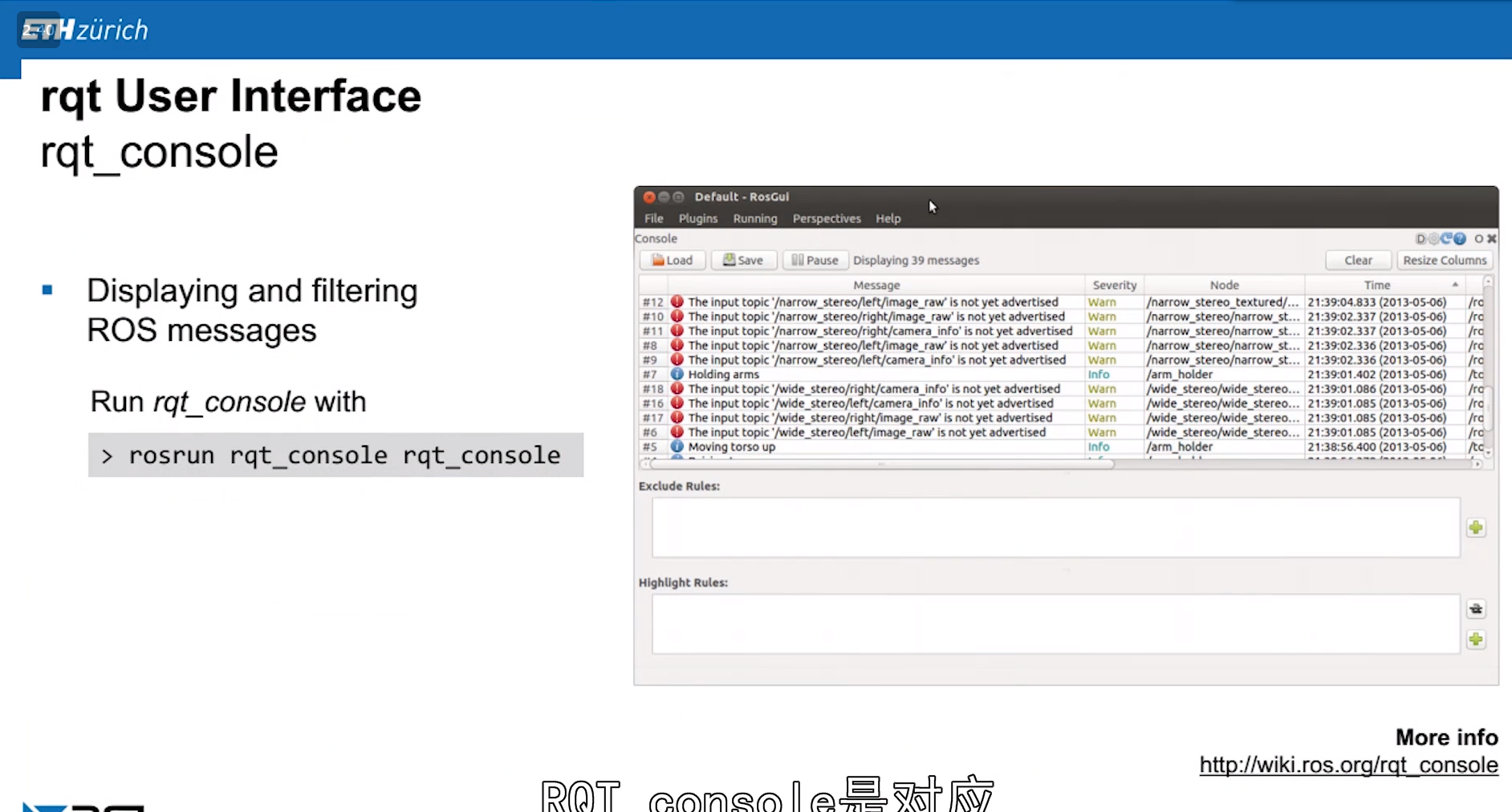
rqt_console
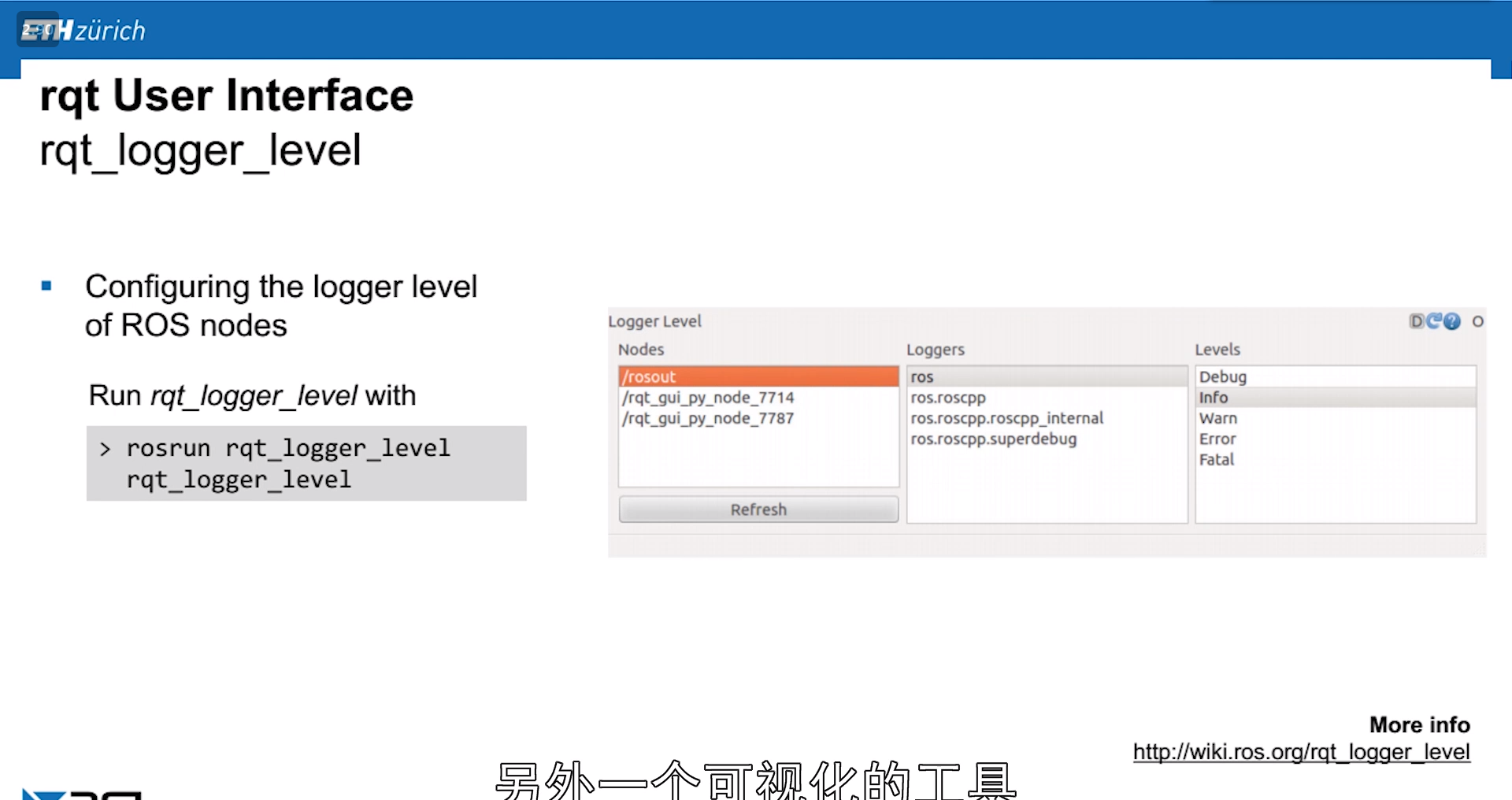
rqt_logger_level
6.Apollo ROS原理4
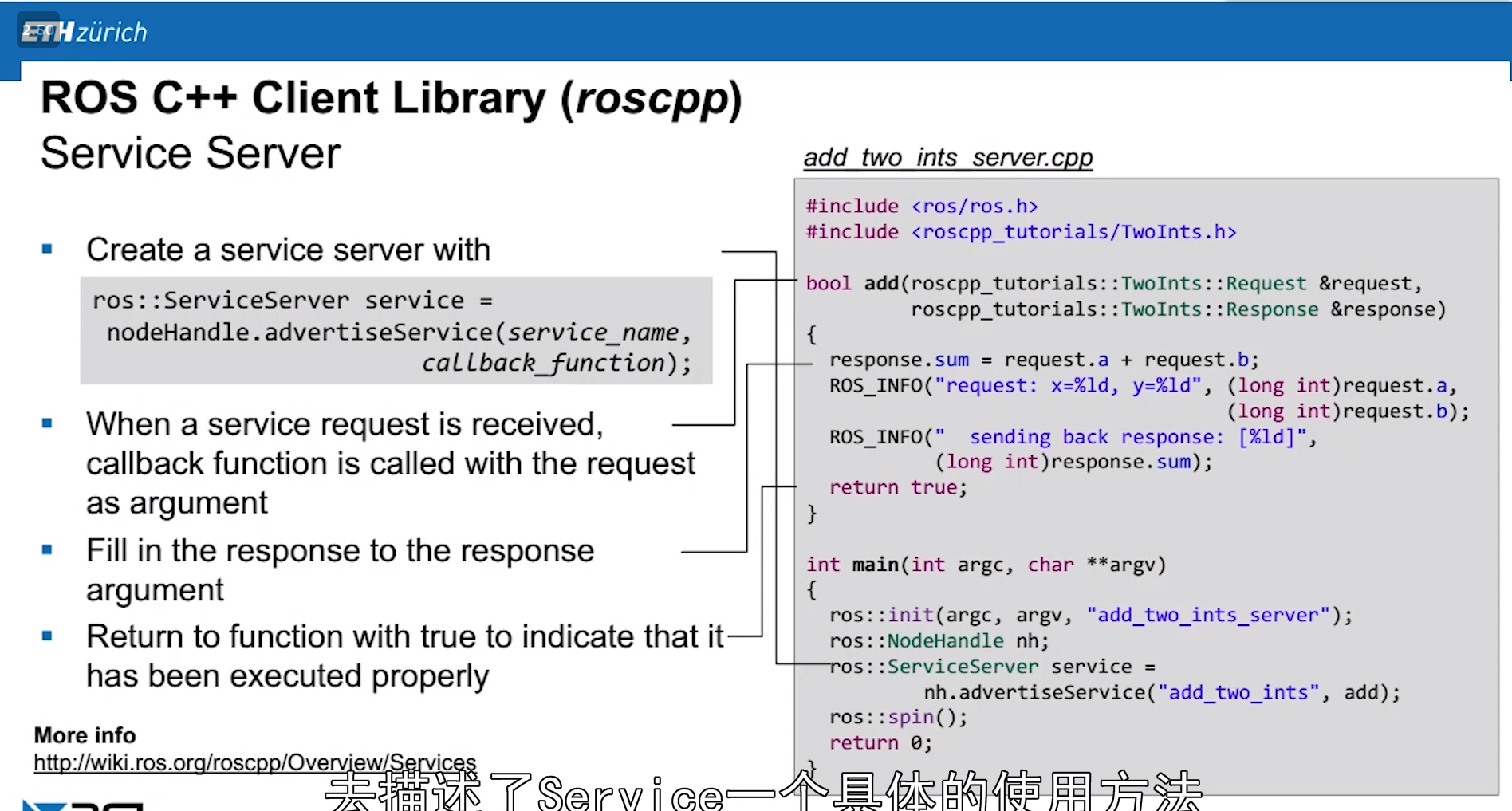
ROS services
ROS Time
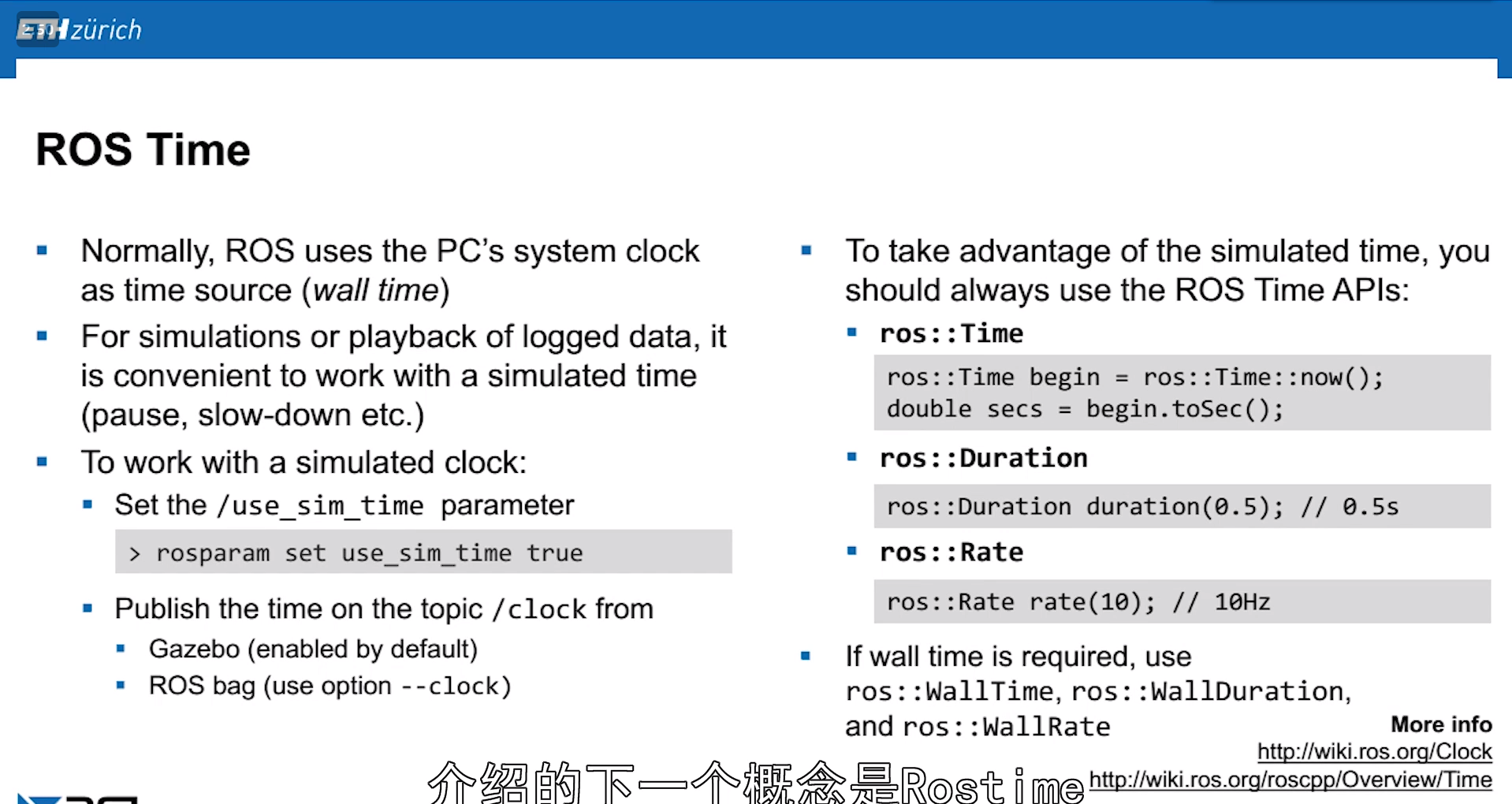
仿真时间,用于仿真模拟
ROS Bags

1.将原始的传感数据等按一定的格式录制到一个bag文件中,然后放入实验室环境中可以通过不断地回放去复现当时的网络场景。
2.可以使得系统迭代优化快速训练、升级
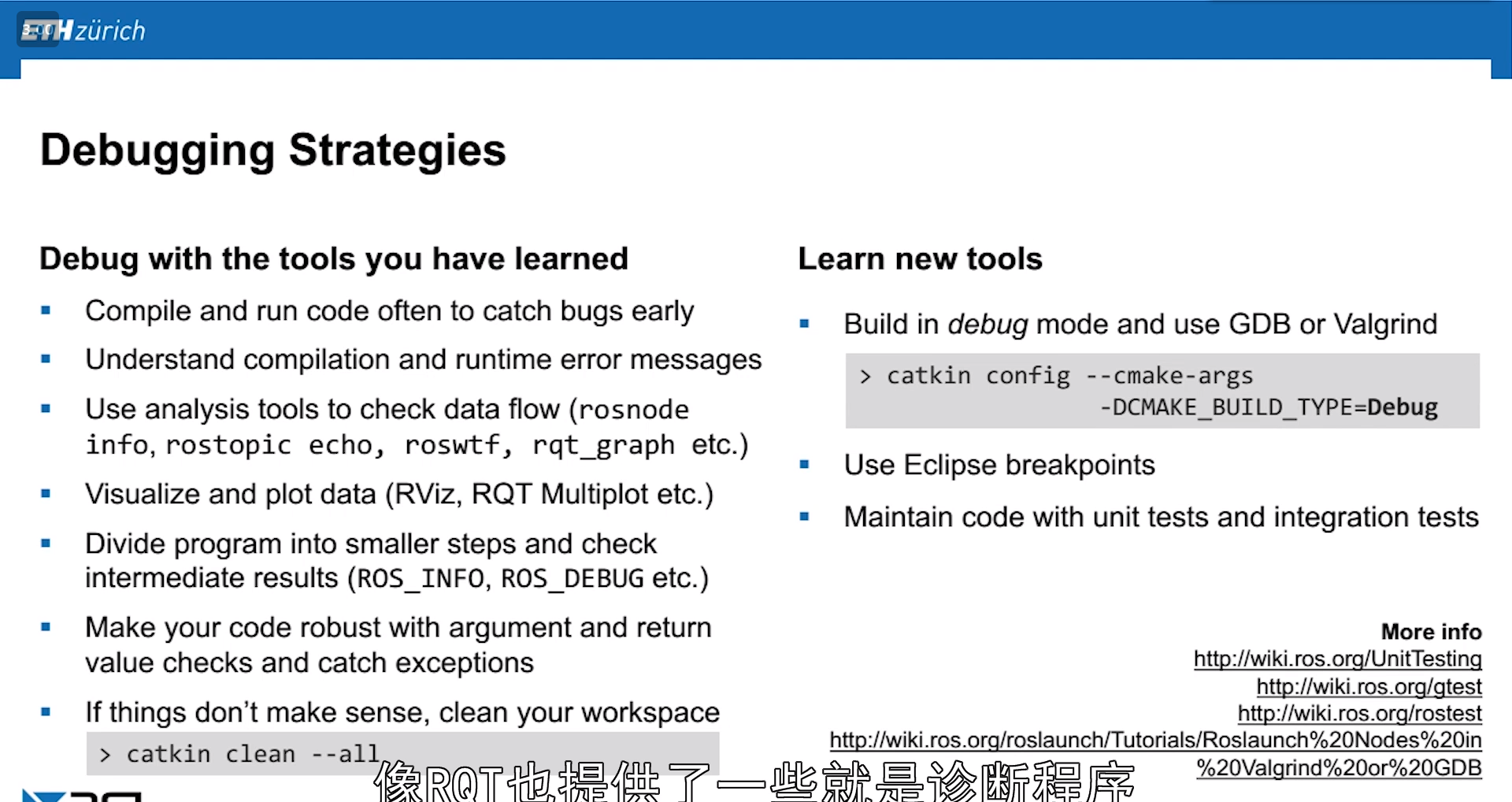
RQT提供的诊断程序,便于debug
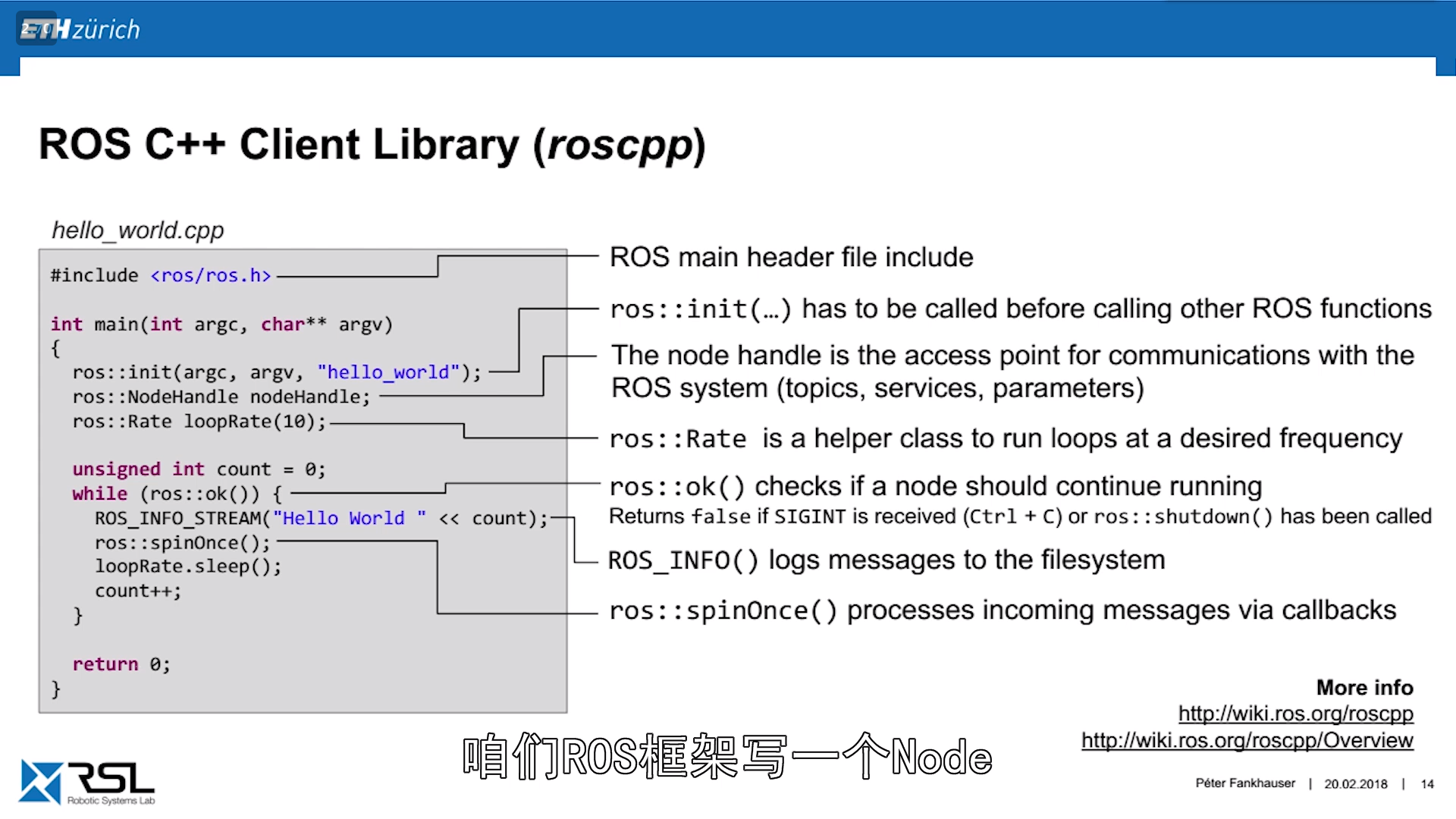
7. ROS深入介绍
ROS packages
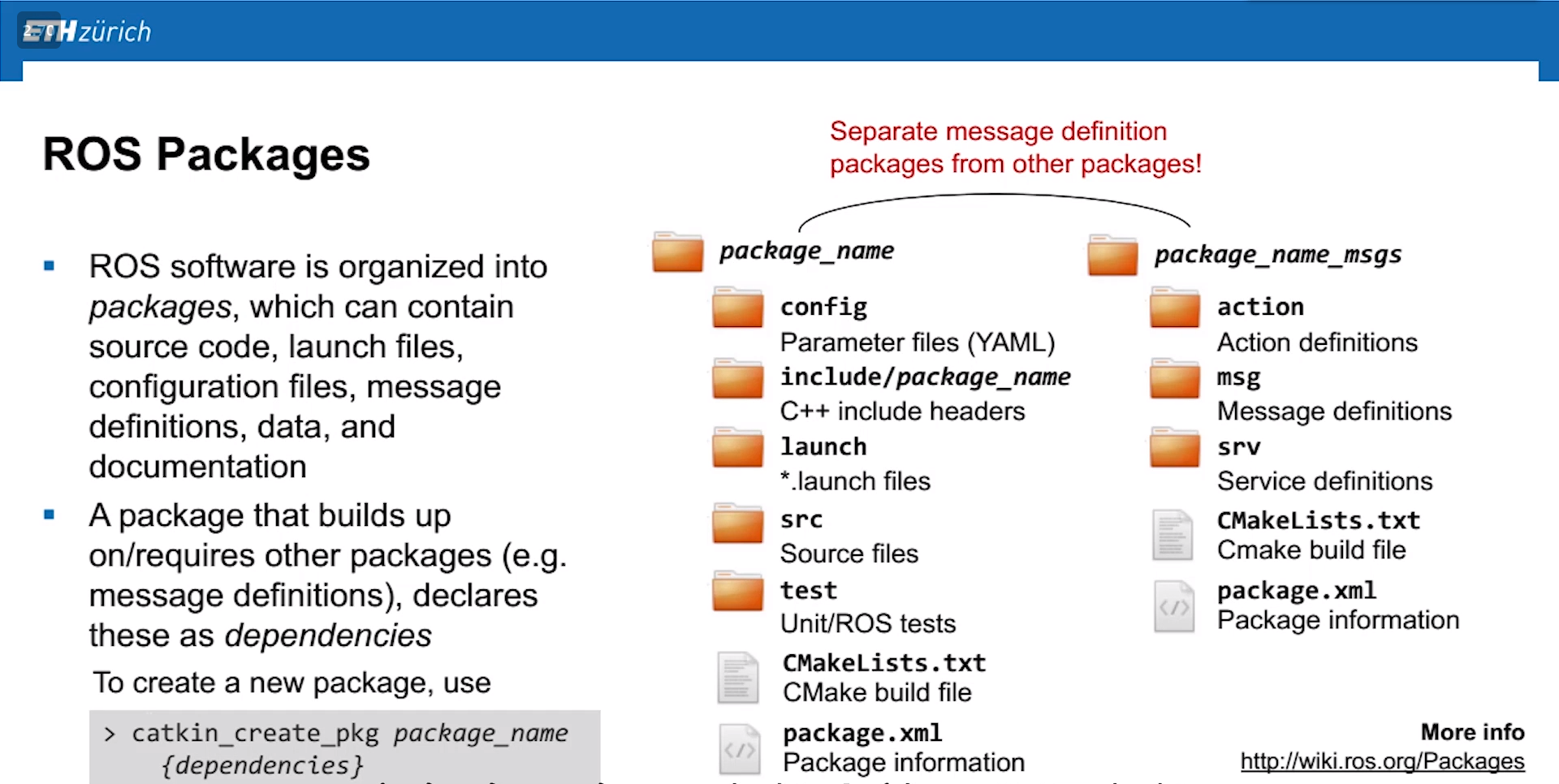
1.package.xml:定义了可执行文件所依赖的一些库,同时定义了软件版本,开发信息等一些常见的描述文件
2.CmakeLists.xml:定义了怎样编译一个ROS工程,
在eclipse编译ROS程序
ROS parameter server
