循迹原理介绍
循迹实践实操的演练
原理介绍
循迹:沿着已经录制好的轨迹进行自动驾驶。
循迹轨迹文件所包含的信息:
1.循迹轨迹定位信息
2.车速反馈和车辆加速度反馈
3.车辆的动作信息
循迹所需要的启动的Apollo软件模块:
1.车辆规划模块
2.控制模块
3.Canbus通讯模块
4.GPS,localization,roscore,dreamview
开发套件配置文件:
位置:

canbus配置
(1)选择vehicle_parameter的brand为CH
(2)选择can_card_parameter的brand为 SOCKET_CAN_RAW ——使用socket通信方式,can卡参数type含义:USB_CARD:表示CAN卡的类型
(3)debug信息:根据实际情况选择是否启用
GNSS配置
标定文件
配置参数:横向、纵向控制器的相关控制参数
横向:车辆轮胎刚度、四轮的质量、LQR的q参数
纵向:速度pid和位置pid参数调节
整车参数配置
循迹实操
(1)循迹前确认底盘已经上号电,工控机已经开启,并且进入了Linux操作系统
(2)启动docker,进入命令行终端,执行docker下的脚本
(3)启动循迹时相关的软件模块
启动bootstrap**
进入dreamview界面
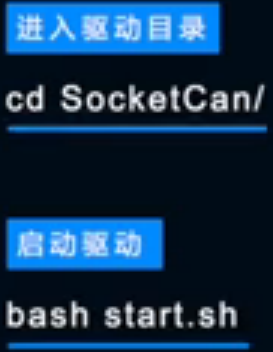
启动canbus,加载驱动

轨迹录制
Record脚本,录制相关轨迹
record start
对起点位置做好标注
自动循迹前: